基于马尔科夫过程的轻型柴油车RDE工况构建
2024-01-12 13:47马标杨瑜张方戈
内燃机与动力装置 2023年6期
马标,杨瑜,张方戈
1.安徽江淮汽车股份有限公司技术中心,安徽合肥 230601;2.江苏沃开汽车技术有限公司,江苏无锡 214178
0 引言
为应对日益严重的环境污染问题,机动车排放标准越来越严格。轻型汽车污染物排放限值及测量方法(中国第六阶段)[1]中规定以轻型车辆测试循环(worldwide harmonized light vehicles test cycle,WLTC)代替国五标准采用的新欧洲驾驶循环测试。尽管采用WLTC更接近真实驾驶状况的多变工况,但仍与汽车实际运行工况及对应的发动机工况存在一定的差别,所以文献[1]引入了实际行驶污染物排放(real driving emissions,RDE)测试。RDE测试要求车辆在规定的边界条件和RDE工况下运行,采用便携式排放测试系统测量并实时记录排放,采用CO2基窗口法计算实际行驶排放[2]。
汽车实际运行工况与气象环境、驾驶员、车辆、车载情况、道路交通状况等众多因素有关,是一个复杂的随机过程,因此研究汽车运行工况场景,如表征工况、最恶劣工况、事件工况、工况预测等,已成为汽车工业的一项共性核心技术,该技术不仅可用于汽车产品的开发、评估和优化,甚至可用于自动驾驶和智能交通[3-4]。
RDE受速度型线、驾驶风格、大气温度、海拔等因素影响。RDE工况及边界条件覆盖面宽、抽查随机性强、实测不可穷尽等,导致RDE试验不确定性高且难以重复,而欧七标准草案更是取消了RDE工况的限制,拓宽了其边界条件,强调RDE最恶劣工况试验[5-6]。
RDE测试边界条件不可控,企业达标成本高、周期长,因此基于虚实结合方法研究RDE逐渐成为行业共识。在台架开发阶段结合模型在环(model in the loop,MIL)或发动机在环(engine in the loop,EIL)开展RDE前置研究很有必要,RDE工况随机生成器是RDE前置研究的必要工具。目前,国外对RDE工况生成器的研究较多并取得进展,如TNO公司基于WLTC的数据库和马尔科夫原理生成RDE工况,AVL公司基于自身的道路数据库和统计合成方法生成RDE工况,FEV公司基于实测的道路数据库和统计合成方法生成RDE工况等,但很难获取这些公司RDE工况生成器的技术资料。
本文中对基于马尔科夫过程的RDE工况进行构建,提高企业RDE开发效率和质量,降低RDE标定成本和周期。
1 轻型柴油车技术参数
随着皮卡车大型化,国内外主流皮卡品牌陆续发布大功率、高转矩柴油皮卡车,本文中以某公司开发的一款N1类轻型柴油皮卡车为研究对象,该车采用采埃孚8AT变速箱,降低机械损失,优化燃烧系统、热管理及排放性能,适应国六b、RDE排放标准,也是为满足四阶段油耗标准,提高产品的市场竞争力而做技术储备。
该轻型柴油机的污染物排放限值、劣化因数和符合性因子如表1、2所示。

表1 柴油机污染物排放限值

表2 柴油机污染物劣化因数和符合性因子
该皮卡车及柴油机主要技术参数如表3、4所示。

表3 皮卡车主要技术参数
2 马尔科夫过程算法
马尔科夫模型可描述车辆行驶过程中车速随时间变化的历程,目前已广泛用于工况的生成研究[7]。
马尔科夫过程(Markov process)是一个典型的随机过程。设X(t)是随机过程,当X(t)在时刻t0所处的状态已知时,时刻t(t>t0)所处的状态与在t0时刻之前的状态无关,该特性称为马尔科夫性或无后效性。时间离散、状态离散的马尔科夫过程称为马尔科夫链。马尔科夫链中,各个时刻状态的转变由状态转移概率矩阵控制[8-9]。
马尔科夫性可以表示为:
P={Xn+1=in+1|X0=i0,X1=i1,…,Xn=in}=P{Xn+1=in+1|Xn=in},
式中:i为马尔科夫过程的状态,i=0,1,2,…,n。
第i个状态至第j个状态的转移概率
pi,j=P{Xn+1=j|Xn=i}。
假设状态空间有k个状态,则有k2个转变的可能性。转移概率矩阵[10]
第2个特性表明各个状态之间相互独立,且状态有限可列。
3 基于马尔科夫过程构建RDE工况
基于马尔科夫过程构建RDE工况生成器的流程如图1所示。

图1 RDE工况生成器的开发流程
基于自主积累的实测RDE数据库,包含平原、高原、山路、平路等样本[11-13]。自动提取相应的城市工况、郊区工况和高速工况,多维度统计分析各工况的特征,包括时间、短行程个数、停车时间、平均车速、里程等,求出城市工况、郊区工况和高速工况间的转移矩阵。
由于积累的RDE数据库样本数和多样性存在不足,所以在转移矩阵增加一定的随机扰动。工程应用时,在原有转移概率基础上增加1个 0~1的随机数,再乘以所有转移概率的4分位数。
基于各工况的转移矩阵依次随机生成RDE的城市工况、郊区工况和高速工况,随机组合生成完整的RDE工况,并选择符合RDE标准的工况。但有些RDE合规工况在实际应用中不具备可行性(例如加速度),所以需搭建动力学MIL模型,评估合规RDE工况的驾驶可行性,保留有效的RDE工况。
根据研究用皮卡车及其相近车型的实测RDE数据,求出城市工况、郊区工况和高速工况的转移概率,如图2所示。
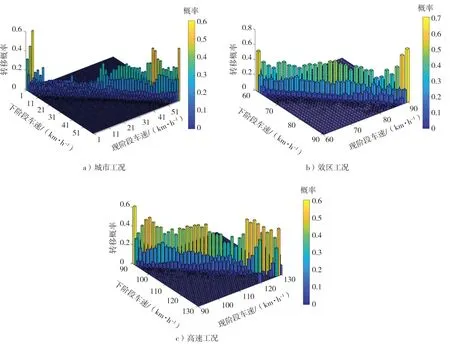
图2 城市、郊区、高速工况转移概率
虽然已考虑随机扰动,但生成RDE工况的激烈驾驶程度可能仍不能满足工况覆盖要求,需进一步修正激烈程度。修正方法有基于修正系数获取期望的激烈驾驶工况和对车速进行低通滤波获取柔和驾驶工况2种。
修正系数
f=F(v,a),
式中:v为车速,a为车辆加速度。
调整车速与加速度,使车速与正向加速度乘积的第95百分位数(记为kv,a,95)更接近限制边界,获取期望的激烈驾驶工况。
本文中基于修正系数map自适应填充获取的从正常驾驶到激烈驾驶的修正过程如图3所示,图中:kv,a,95-up为kv,a,95的最大值,kv,a,95-75为kv,a,95-up的75%,kv,a,95-50为kv,a,95-up的50%,kv,a,95-u、kv,a,95-r、kv,a,95-m分别为修正前城市、郊区、高速工况的kv,a,95,kv,a,95-uc、kv,a,95-rc、kv,a,95-mc分别为修正后城市、郊区、高速工况的kv,a,95。由图3可知:修正后的城市、郊区、高速工况的kv,a,95均大于修正前,接近上限,从普通驾驶修正到激烈驾驶。
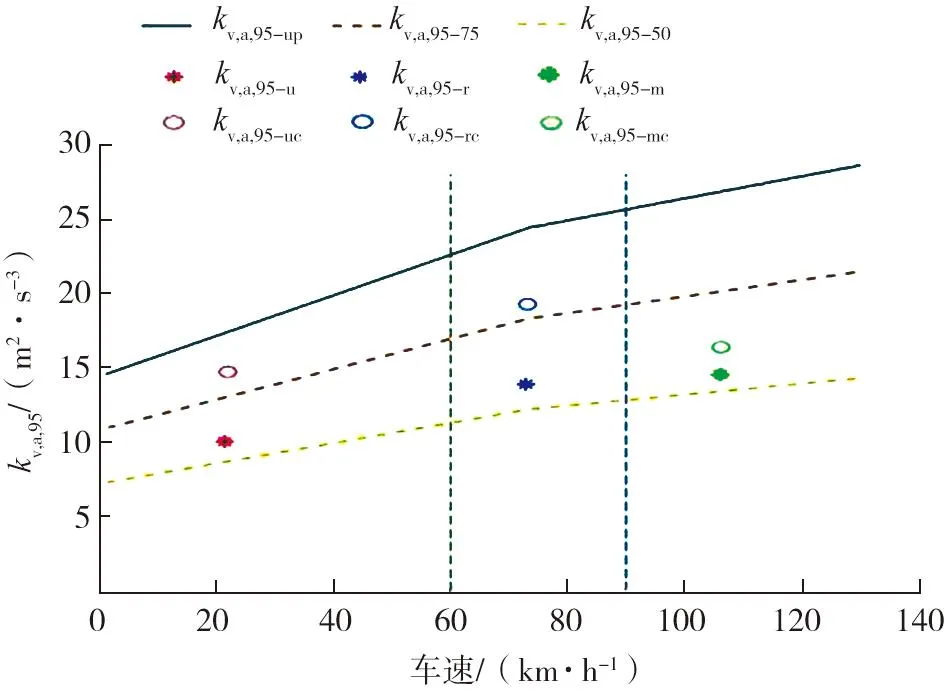
图3 正常驾驶到激烈驾驶的修正过程
RDE标准要求测试总持续时间为90~120 min,城市、郊区、高速工况的行驶里程不小于16 km,城市、郊区、高速工况的行驶里程比例分别为29%~34%、23%~43%、23%~43%。
本文中随机生成1个RDE工况,其时间、里程概况如表5所示。

表5 RDE工况里程、时间概况
对生成RDE工况进行实测,各工况行驶时间、车速的标准和实测结果对比如表6所示,合规性验证如表7所示。

表6 RDE工况行驶时间、车速的标准和实测结果对比

表7 RDE工况合规性验证
由表5~7可知:生成的RDE工况的时间、里程、车速等均符合RDE标准,并通过了合规性验证,可用于后续仿真模型搭建、EIL台架试验等。
4 结论
分析马尔科夫过程算法原理,基于马尔科夫过程开发RDE工况随机生成器。
1)RDE工况生成器可以生成满足国六标准要求的RDE工况,可以直接用于仿真模型搭建、EIL台架试验、转毂台架试验等,提高RDE虚实结合研究的效率。
2)RDE工况随机生成器具有驾驶激烈程度修正功能,可以修正成客户自主定义的驾驶激烈程度,适应性强。
3)按该生成器生成的RDE工况进行实际道路测试,结果输入到相应的NOx排放模型,可为下一步排放研究奠定基础。
猜你喜欢
有色金属(矿山部分)(2021年4期)2021-08-30
资源导刊(信息化测绘)(2020年5期)2020-06-22
汽车维护与修理(2018年1期)2018-04-04
湖北师范大学学报(自然科学版)(2015年1期)2016-01-10
汽车文摘(2015年12期)2015-12-12
汽车维护与修理(2015年5期)2015-02-28
警察技术(2015年6期)2015-02-27
河南科技(2014年11期)2014-02-27
警察技术(2013年1期)2013-03-20