高空作业车倾斜安全控制系统改造研究与应用*
2024-01-12 06:54刘早红孙华胡广智谢祥红孙捍东刘在良
机械研究与应用 2023年6期
刘早红,孙华,胡广智,谢祥红,孙捍东,刘在良
(1.浙江友联修造船有限公司,浙江 舟山 316281;2.浙江国际海运职业技术学院 海洋装备工程学院,浙江 舟山 316021)
0 引 言
高空作业车因其便捷灵活、成本低廉的特点,在各行业中作为高处作业的主要施工设备之一得以广泛应用,尤其在船舶修造行业中更是大量使用[1]。然而,在船舶修造行业中,由于使用环境有着与其他行业截然不同的不同的特点,比如使用环境复杂、条件苛刻、强度要求高等,这使得高空作业车极易发生安全事故,特别是高空作业车倾覆事故,且高空作业车一旦倾覆,大多是恶性安全事故。例如,近期某船厂货舱内高空作业车因作业人员操作不当发生倾翻,导致发生重大人员伤害事故。因此,如何减少或杜绝高空作业车倾覆事故的发生,已成为解决高空作业车安全操作的重中之重[2]。
笔者从高空作业车电气控制系统升级改造入手,通过额外增加倾斜报警及主动干预装置来完成。在高空作业车工作过程中出现危险操作时,该装置可有效地同时限制高空作业车工作臂继续抬臂、伸长、旋转和行车等动作,为解决倾覆难题提供了一套可行的方案。设计改造中,首先研究原系统的控制机理,分析控制逻辑,找出系统内在缺陷;再结合实际使用经验对原车电气控制系统做出针对性改进升级;改进后的高空作业车在实际使用中的倾斜隐患已得到有效地控制。
1 高空作业车的主要参数配置
根据笔者公司高空作业车的实际使用情况,对某几种车型进行研究,制定改造升级方案。以某一种车型为例进行阐述,外形尺寸及作业范围如图1~2所示。某车型主要技术参数如表1所列。
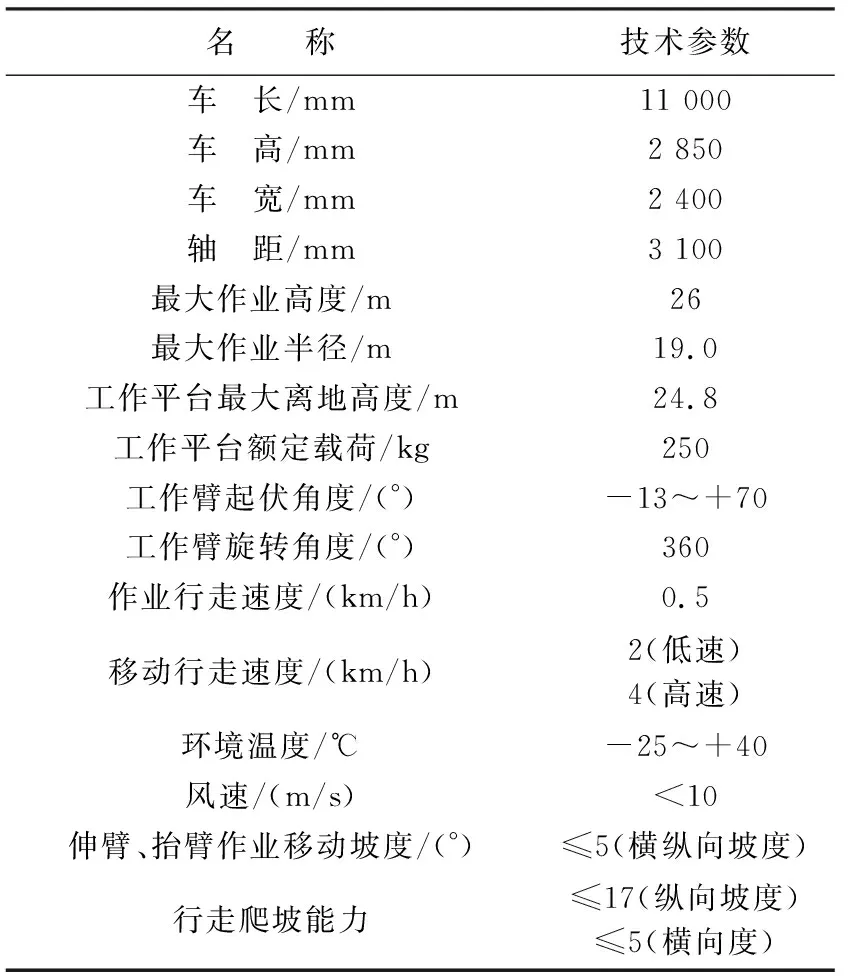
表1 某高空作业车主要技术参数表
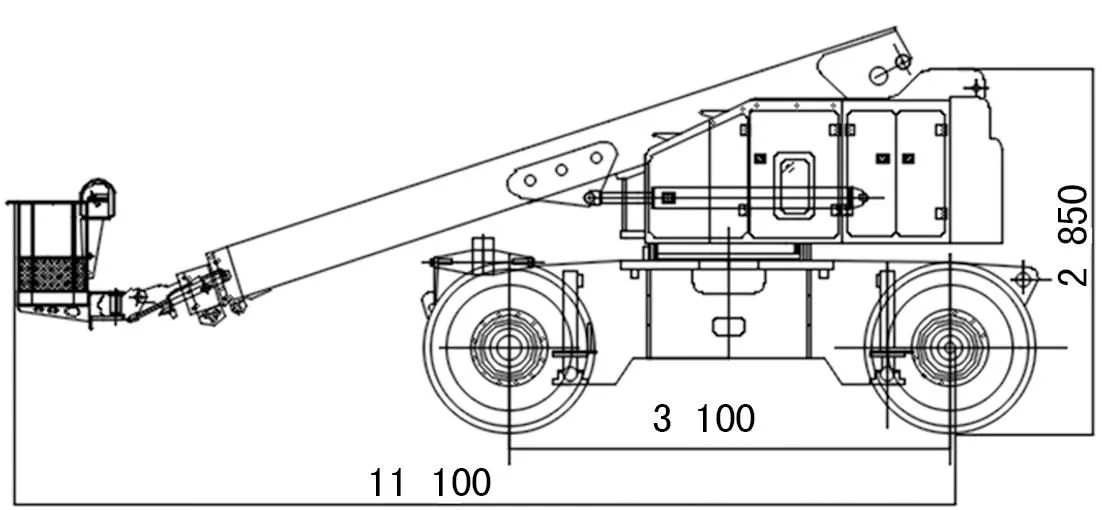
图1 高空作业车外形尺寸图

图2 高空作业车作业范围图
2 原因分析
从上述高空作业车的技术参数可以看出:① 其工作臂高度可达26 m之高,可360°旋转,工作高度也随工作环境和施工位置的变化而变化,这说明高空作业车在工作时重心是在不断变换的,而重心不稳则是倾覆的最重要因素之一;② 代表车身稳性的车体支撑的投影面积仅仅7 m2左右(车宽2 400 mm×3 100 mm),相对高达26 m的作业高度及不断变换的重心,如此小的投影面积,不可能给高空作业车以充分的稳定性;③ 高空作业车的抗风能力≤10 m/s(只相当于5级风力)、作业行走车速≤0.5 km/h、最大允许作业坡度≤5°,这说明高空作业车的自身固有稳性较低。高空作业车自身结构特点决定了其具有稳性差、易倾覆的固有性质[3]。此外,高空作业车在施工过程中,工作斗内装载的货物和施工人员的多少,或者操作者操作不当也是导致高空作业车重心变化而倾覆的原因之一[4]。
高空作业车车体坡度的变化,必然造成车体重心的变化,从而引起车体倾斜力矩的变化。当倾斜力矩超过高空作业车的承受能力时,高空作业车即会出现倾倒,造成事故[5]。所有高空车在施工作业时,必须能及时检测到高空作业车车体的倾斜角度。基于此,从电气控制系统着手,改造控制系统,监测运行过程中车体的倾斜角度,限制危险操作,这是此次改造升级的出发点。
3 改造原理
高空作业车的作业动作由液压系统来实现。液压系统由液压泵、油箱、液压油缸、液压马达、液压控制阀及管路、接头、过滤器等部件组成[6]。柴油发动机为液压系统提供动力,驱动液压泵运转,液压泵产生的油压通过电气系统控制的电液比例阀传递到各液压执行单元(液压缸和液压马达),以实现起伏、回转、行走等动作。电气控制系统采用PLVC控制系统,装备CAN总线通讯方式,利用PLVC接口,通过调整电液比例阀的参数来实现对整车的操作控制及故障诊断。PLVC控制结构简单,动作灵敏,具有很高的可靠性和精确度。因此此次改造升级对原车控制系统不作根本的改动,保留原有系统,只在原车电气系统基础上额外增加一套倾斜控制报警系统,并整合进原系统中,与原有系统无缝衔接,实现对高空车整车的操作控制。新增的倾斜安全控制系统增设高精度水平传感器,可以监测到高空作业车在作业过程中整车的水平角度,并将水平角度信号实时反馈给车辆控制系统,控制系统将采集到的车辆水平角与设定值比对,当车辆整体水平倾斜角度达到3°时,控制系统自动报警,蜂鸣器鸣响,倾斜指示灯亮起;如果车辆整体水平倾斜角度继续增大,达到5°时,控制系统会自动介入,主动干预操作行为,限制危险动作;控制倾角力矩持续增大则会发生倾覆。
4 技术要求
(1) 控制流程
改装升级的控制流程如图3所示。

图3 改装升级控制流程图
(2) 倾斜报警
当倾斜报警器监测到倾角达到3°时,控制系统开始报警,蜂鸣器持续发出声音警示。
(3) 倾斜停机
当倾斜报警器监测到车体水平倾斜角度达到5°时,车辆危险性动作将受到限制,操作手柄失效,无法进行伸臂、抬臂、回转、行车等操作,而安全性动作如缩臂、降臂则可以继续保持。为保证液压系统正常工作,作为动力源的发动机始终保持正常运转。危险性动作受限后的操作表现为:①车辆工作臂起伏上升动作停止,下降动作正常;②车辆工作臂伸臂动作停止,缩臂动作正常;③车辆转台回转动作停止;④ 车辆行走动作停止,前进、后退均没有动作。
(4) 动作恢复
当倾斜报警器监测到车体水平倾斜角度达到5°时,将工作臂下降到0°角以内,车辆恢复行走移动功能,同时蜂鸣器仍然持续发出警示声音,工作臂伸臂和上升危险动作仍然受限。
当车行走地面坡度低于5°时,大于3°时,控制系统解除限制,恢复所有动作,蜂鸣器仍然持续发出警示声音。
当车行走地面坡度低于3°时,蜂鸣器停止发出警示声音,恢复所有动作,可以正常作业。
(5) 改造部分的局部电路控制图,如图4所示。
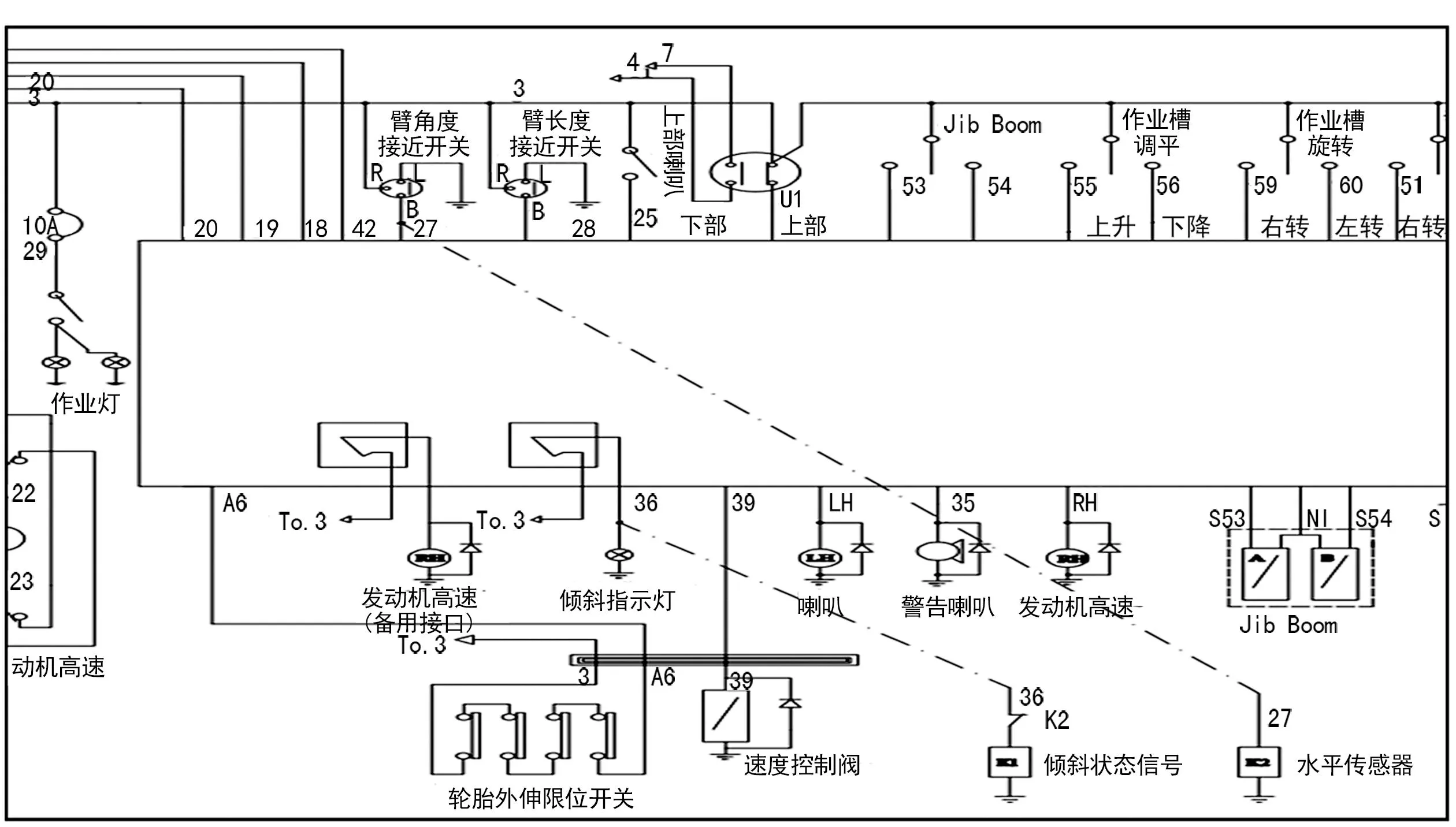
图4 改造部分的电路控制图
(6) 加装的主要电气元件和作用
电气元件:选择24V 11脚继电器和连接导线作为电气元件。
作用:当车体发生倾斜时,K1继电器接收PLVC的倾斜信号,并停止高空作业车驱动轮行走等危险动作,因此只能操作手柄把大臂完全缩回,大臂角度降至-13°~0°内,并发出高空作业车已在安全状态的信号给K2继电器,然后K2继电器把信号反馈给K1继电器,操作手柄让K1继电器执行行走,直至高空车行走到坡度低于3°区域,警报取消,高空车才能恢复正常运行。
5 改造后安全效果
根据高空作业车技术设计参数,车辆作业时移动的横纵向坡度为≤5°,如作业移动横纵向坡度超过5°,车辆倾覆的可能性就会增大。
对电气控制系统升级改造后的高空作业车进行现场实践跟踪发现,其安全隐患排查效果比系统改造前有明显的提升。将电气控制系统改造前后的安全性能进行对比,结果如表2所列。
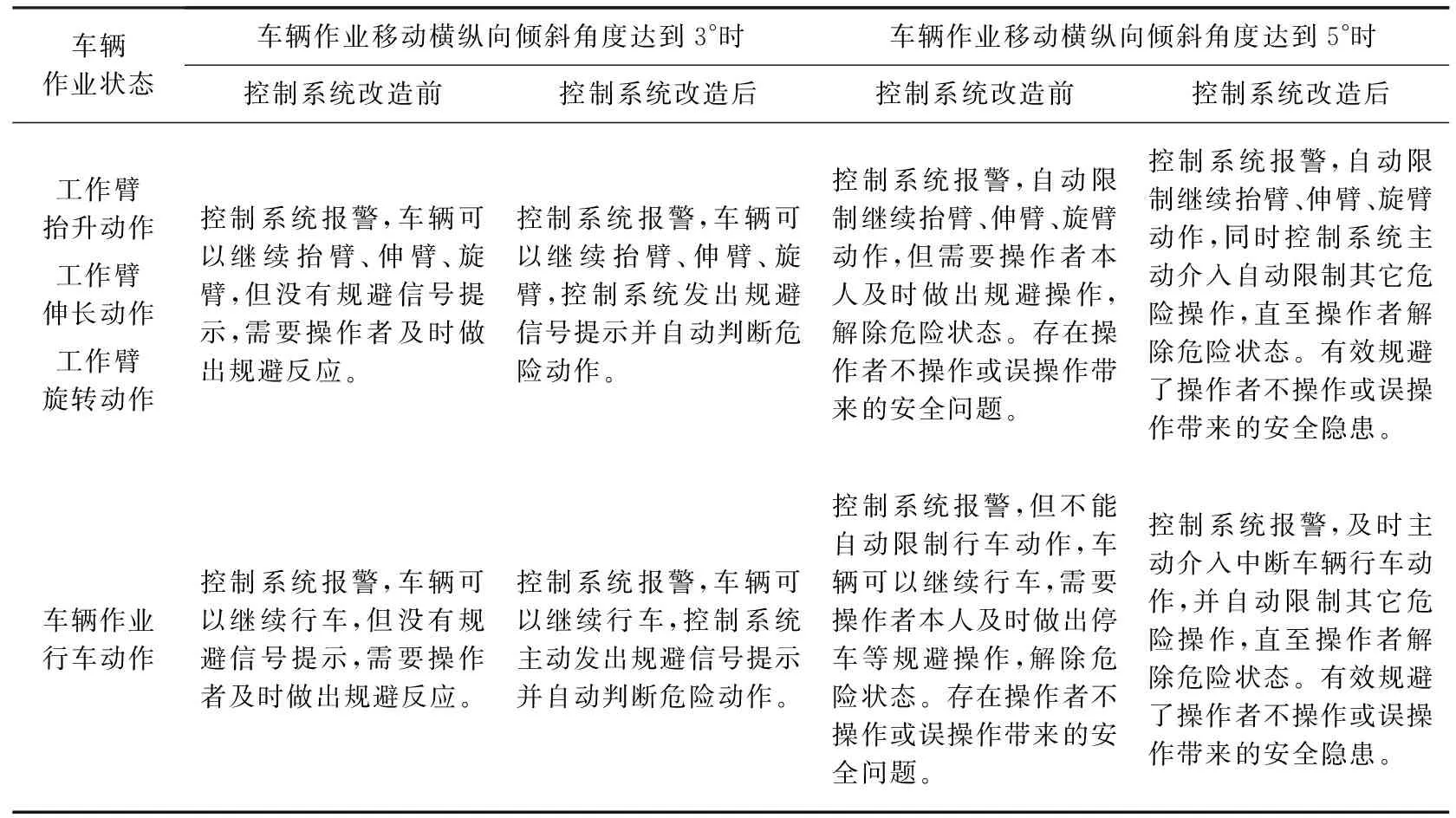
表2 电气控制系统改造前后安全性能对比表
电气控制系统未改造前,车辆在作业过程中,当车体横纵向倾斜角度达到3°时,控制系统发出声光报警信号,提示操作者有危险存在;但由于控制系统没有主动介入功能,没有发出规避信号,不能自动限制危险动作,需要操作者及时做出规避反应。如果操作者不及时做出规避动作或者规避动作失误(如继续行车),车体横纵向倾斜角度有可能持续增大,当横纵向倾斜角度超过5°的设计参数值后,车辆可能出现倾覆,造成安全事故。
电气控制系统改造后,车辆在作业过程中,当车体横纵向倾斜角度达到3°时,控制系统自动发出声光报警信号。由于控制系统具有主动干预功能,因此可发出规避信号提示,可自动判断危险动作。如果车体横纵向倾斜角度依然持续增大,当达到5°时,不需要操作者做出规避动作,控制系统会主动干预并限制危险动作,自动中断危险动作(如中断行车动作),有效避免人为操作失误造成的倾覆事故的发生,使车辆的安全保障更加智能,达到自动排查或中止安全隐患的效果。
6 结 语
文中对高空作业车倾斜安全电气控制系统进行了改造升级,在原来控制系统中加装了报警及主动干预装置后,既保证了操作人员实时掌握车辆运行状态和可能发生的危险,同时对操作人员的行为起到有效监督与干预作用,如果操作人员未对报警信号做出反应时,主动干预系统会及时做出反应,限制操作人员的危险行为,避免事故发生。在实践中,经过改造后的高空作业车发生倾覆的可能性明显较少,同时操作人员的不良习惯也得以约束纠正。高空作业车倾斜安全控制系统的改造,为解决高空作业车倾覆事故做出了积极探索,也取得了预期效果,验证了改造的可行性、有效性。
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
电脑报(2020年12期)2020-06-30
时代农机(2019年2期)2019-04-24
电子制作(2018年19期)2018-11-14
电力系统及其自动化学报(2016年5期)2016-12-01
汽车维护与修理(2016年10期)2016-07-10
工业设计(2016年6期)2016-04-17
焊接(2015年1期)2015-07-18
焊接(2015年1期)2015-07-18
建筑机械化(2015年7期)2015-01-03