
机械手控制系统的研究与应用
2024-01-15 11:02郭美君
电动工具 2023年6期
郭美君
(辽宁工程职业学院,辽宁 铁岭 112000)
0 引言
随着科学技术的进步,工业机械手控制系统受到了更多的关注,建立基于智能化技术的应用模式,配合数字电子计算机共同建立完整的运行模式,可以有效优化自动化技术应用效能,维护制造业发展动力。
1 核心技术
目前,制造业自动化生产线涉及的自动装配、图像系统检查、智能搬运等工位中普遍使用机械手操作,提高效率的同时优化作业质量,且不受作业环境影响,更好地打造完整可控的作业模式。其核心技术主要体现在:
1)智能控制器。基于伺服类电机控制技术,结合嵌入式芯片建立相应的控制平台,有效地结合相关参数要求和规范,建立相匹配的运行模式,更好地维护应用管理效果。伺服原理如图1 所示。一般而言,在实际运行过程中还需要利用温度控制策略、空间控制策略、实践控制策略、负载控制策略等,配合控制系统的人机交互界面,从而实现完整的智能控制处理,保证相应工作按照指令要求有序落实,最大程度提高系统统筹管理水平。
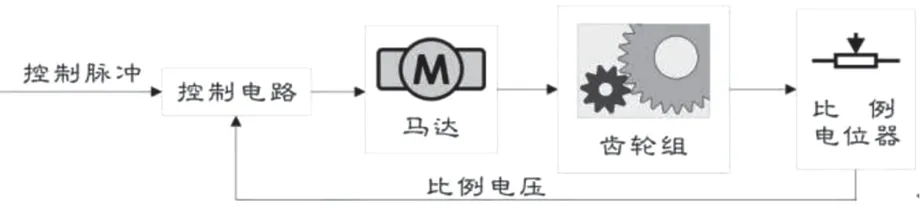
图1 伺服原理
2)机械关节。基于伺服电机关节应用技术,配合通用气动关节以及关节位置传感器即可开展相应工作,借助传感器获取相关参数,结合参数关联性落实具体的指令信息,最大程度维护整体运行管理的规范性,也能匹配后续作业规范,保证机械关节运行的灵活性。
3)触觉传感器。基于面向人类使用的触觉传感系统,建立相应的系统控制单元,按照编程内容完成具体操作工序,保证工序衔接合理的同时,维持后续应用管理的科学性,最大程度避免运行稳定性不足的问题,打造多元化控制模式,配合专家系统就能更好地提高数据信息参数获取和处理分析的水平[1];建立面向机械手使用的负载触觉传感系统,及时完成指令信息的分级和处理,确保后续操作环节的可控性和规范性,整合具体作业内容,保证触觉信息交互和共享都能顺利展开,实现统筹管理的目标。
4)机器人视觉研究。利用面向人类的触觉传感系统和面向机械手的负载触觉传感系统,建立相应的视觉信息统筹控制模式,解析视觉数据和参数,以保证机械手相应动作符合预期标准。
2 运行研究
2.1 系统运行方式
在机械子系统运行过程中,依据机械手的机械结构种类建立相应的运行方案,按照不同运行方式完成具体工作,整合相应的资源信息,维系统筹控制的合理性。
第一,齿轮运动体传动方式,驱动器能提供传动需要的能量,并且侧向偏移的滚轮预张力系统还能减少游隙造成的影响,在压紧滚轮系统维持啮合充足的同时,配合塑料齿形带和铝制齿条组合形式,就能搭建一条无需润滑的传动通道,更好地提高作业的安全性和便捷性,维持机械手控制作业的整体水平[2]。
第二,伸缩运动方式,能实现最小总高度下的最大提升动力,滚柱轴承上安装免维护的塑料滚轮,能减少磨损,维持较为合理的平滑运行状态,更好地满足导向控制需求。与此同时,驱动站应用过程中,空心轴和法兰设计也要满足伺服驱动器法兰处理要求,更好地维护整体驱动技术运行效果。
第三,动态提升传动方式,主要是应用轻型紧凑的结构形成封闭扭矩形态,在对应侧利用触发板完成处理工作,配合使用限位块和附加机械元件。电缆结构则借助型材中心开口处理模式,带动整个封闭结构维持良好的作业状态。与此同时,这种传动处理模式还能保证铸造外壳体承受较大的侧向力和水平加速引起的弯矩,更好地建立完整的连接处理模式[3]。
2.2 系统运行原理
在机械手控制系统运行过程中,动力执行模块主要包括AC 交流电机、DC 直流电机、步进电机、直流伺服电机、交流伺服电机以及液压驱动系统等,结合不同的执行指令落实相应的工作,共同维持系统稳定运行,以确保机械手控制环节的可靠性和安全性。目前,系统控制模式包括PC 控制、PLC 控制、运动板卡控制及软件控制等,依据具体应用规范和管理标准,维持系统应用管理的基本水平,更好地提高系统综合控制效果。
1)PC 控制。使用C 语言或其他标准编程语言编程完成程序的控制处理,与复杂的图形接口共同应用在具体场景中,建立完整的控制模式,打造除机器控制以外的数据采集处理模式,有效提升机器和制造商信息连通效果。这种控制模式能打造整体图像,具备大容量存储记忆和开放式网络,承载大量商业软件,配合标准的网络支持即可维持信息交互处理的流畅性。基于此,在建立大范围分散I/O 设备的基础上,有效打造集中控制场景,能更好地提高电气控制的实效性,保证机械手控制系统运行稳定[4]。
2)PLC 逻辑控制方法。PLC 控制方案的可靠性较高,利用实践作业即可总结技术的要点和关键,支持在线编辑。一般而言,应用在I/O 位于中心的应用体系中,建立匹配的过程管理模式,整体结构控制环节可以支持500 个I/O点控制处理[5]。建立程序原点系统、伸缩气缸系统、放松机械爪系统等,结合相应的控制模式就能有效地完成指令信息,实现旋转手臂的复位处理。启动程序后就能保证相应的动作到达指定轨迹,满足实际应用要求。此外,结合PLC 技术,在直流和交流机械手控制系统中能有效建立相应的作业规划,将电脉冲转化为执行机构,配合驱动器收取的信号,按照I/O 和机械手关系表落实具体指令(如表1 所示),配合自缩程度设计环节,更好地确保程序指令连接的合理性,提高系统的抗干扰能力[6]。在应用PLC 技术的过程中,结合对应指令设计规范,更好地建立完整的输入输出控制模式,可在最大程度上保证相应指令处理的规范性,强化工业机械手和PLC 技术的联动效果,维持最优处理效能[7]。
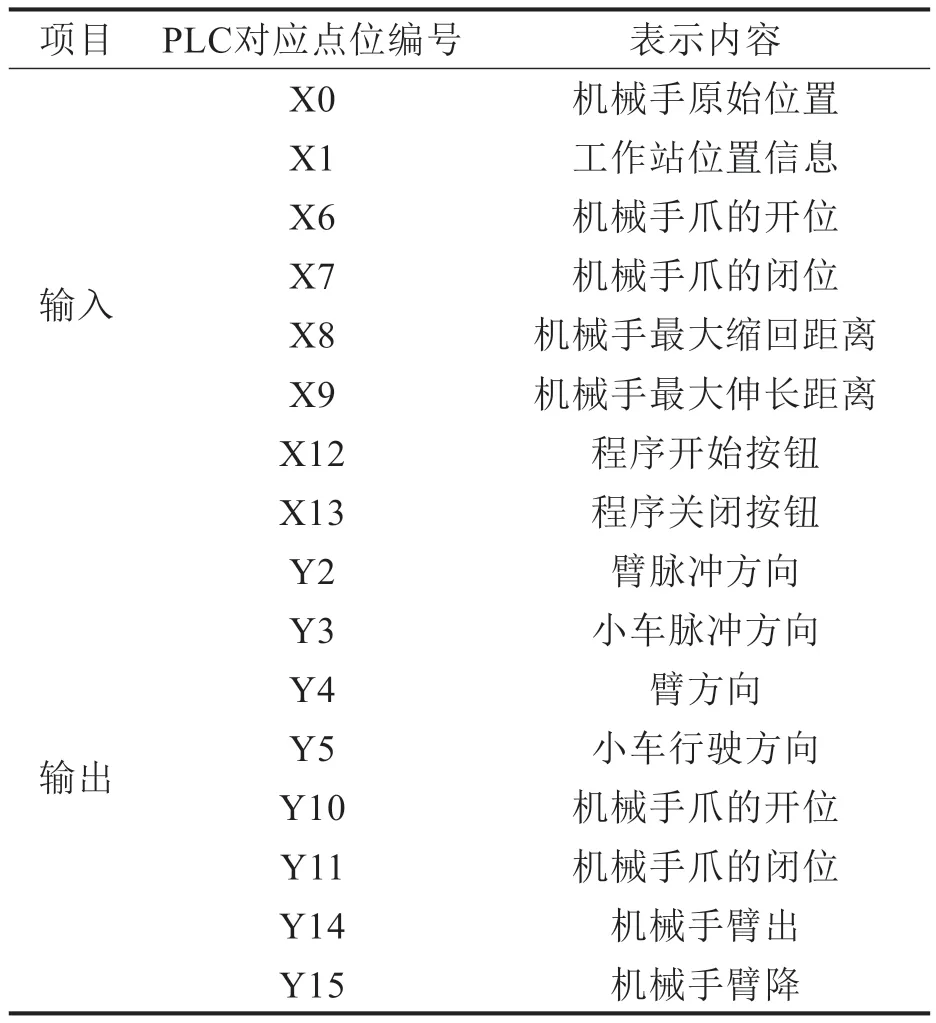
表1 PLC控制系统中I/O和机械手关系
3)运动板卡控制。基于电气应用要求,实现低等到中等复杂程度应用场景机器控制处理,配合运动控制模式建立相匹配的机器控制处理模式,在相应环境中,完成输入输出和运动参数的控制处理,应用在多种场景中,提供运动功能和机器控制功能。另外,运动板卡控制方式能建立独立控制模式,使用人机接口交互控制方式,完成数据输入后,及时建立输出信号匹配体系,将复杂的机器拆分为简单的机器控制元件,确保子元件通讯更加便捷高效。
4)软件控制。在机械手控制系统中依赖软件控制完成相应工作,使用对应的控制模式,构建更加合理且高效的运行平台,提高控制指令传递的水平,维持作业的基本效果。首先,建立点对点控制模式,基于软件操作流程建立点对点交互处理机制,实时管理机械手点位。其次,建立数控编程模式,配合位置、速度、插补以及电子尺建立完整的数控体系,确保相应的控制环节和指令处理有序开展,提高阶段性作业的质量水平。最后,建立轨迹制图模式、模拟仿真模式、外围控制模式等,打造相应的控制方案,配合子系统应用要求,维持处理环节的可控性,提高动作指令精准程度。除此之外,网络链接模式也较为常见,基于以太网串口通讯建立相匹配的数据接收发送体系,更好地执行传送时间表内的指令操作内容,保证机械手臂动作的稳定性和精准性符合预期[8]。
3 结语
综上所述,在机械手控制系统研究工作中,分析控制原理,了解PC 控制、PLC 控制、运动板卡控制以及软件控制相关内容,旨在更好地完善控制环节,建立相匹配的输入输出体系,发挥机械手控制系统的应用优势,为工业和制造业系统发展与进步奠定坚实基础。
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26
科普童话·神秘大侦探(2023年1期)2023-05-30
海外星云(2021年6期)2021-10-14
测控技术(2018年5期)2018-12-09
电子测试(2018年18期)2018-11-14
特别健康(2018年3期)2018-07-04
工业设计(2016年4期)2016-05-04
通信电源技术(2016年1期)2016-04-16
工业设计(2016年10期)2016-04-16
机电信息(2015年3期)2015-02-27
