
基于三维激光扫描的植被覆盖边坡监测
2024-01-16 00:57王德军万田宝孙晓东许靖莉杜子涛
测绘通报 2023年12期
王德军,万田宝,孙晓东,许靖莉,杜子涛
(1. 河北工业大学土木与交通学院,天津 300401; 2. 河北迁曹高速公路开发有限公司,河北 唐山 063200;3. 天津市交通科学研究院,天津 300074; 4. 中交第一航务工程勘察设计院有限公司,天津 300222)
地面三维激光扫描技术能全天候、无接触、快速、高精度地获取点云数据,在地质灾害监测、隧道施工、变形监测等领域应用广泛[1-7]。当监测目标不被植被覆盖或被稀少植被覆盖时,可直接得到监测体表面的点云数据,其监测精度较高。文献[8]通过采集边坡点云数据,进行危岩体分类和锚固计算,为后续危岩治理提供了依据;文献[9]利用三维激光扫描开展煤矿沉陷区监测,与常规监测手段相比具有较好的一致性。当监测区域有植被覆盖时,可利用点云滤波获取DEM。该方法是采用在小范围内取最低点的过滤方式获取地面信息[10-11]。但研究表明,通过两期DEM对比难以发现50 mm以下的变形[12]。文献[13]提出了基于多尺度维度特征和支持向量机的高陡边坡激光点云的滤波算法,取得了较高的分类精度。文献[14]通过设立固定桩点和在滑坡体上安置目标靶体提高监测精度,在有植被覆盖的情况下取得了较好的监测效果。根据多期点云数据计算变形量时,文献[15]通过将两期点云数据划分为小格的方式直接计算变形值,但需要有明确的变形边界。文献[16]根据点云计算土方量变化、坡度变化、等高线分布变化,进而评价矿山滑坡的变形趋势。文献[17]根据区域点云密度的稳定性,提出新的基于点云密度特征的滑坡位移计算方法,但要求两次采集时测站位置,且扫描配置参数相同。
本文针对边坡具有高植被覆盖,不具备多次回波功能的三维激光扫描难以精确获取地面点云的情况,充分利用布设在边坡体上的传感器表面点云数据提取变形。布设在边坡上的GNSS监测设备的接收天线带有整流罩,其半径自下而上逐渐变小且具有唯一性。利用点云切片拟合出其圆心和半径,根据半径对比,实现同名点匹配,达到点式监测的目的;然后根据不同半径处的圆心得到整流罩的中心线,实现线式监测。数据拟合时,根据拟合残差剔除精度较差的点云,以及验后中误差反映出点云的数据质量,在监测的同时实现数据质量控制。
1 点云拟合的数学模型


图1 点云切片拟合圆

(1)
(2)

(3)
对2m个误差方程写为矩阵形式,即
(4)
其中
(5)
组法方程并解算近似值的改正数,即
(6)

(7)
式(7)联合式(3)可得到坐标残差,以判断点云的数据质量。
2 算例分析
2.1 监测方案
监测区域位于太行山高速武安段,采用GNSS技术和三维激光扫描技术对边坡进行联合监测。分别在2020年8月11日和2021年10月23日采用徕卡P40仪器采集了两期数据。图2中p001、p002为安置在滑坡体上的GNSS连续监测站,保持对滑坡体的全天候监测。c001、c002为位于滑坡体上的周期性监测点,与三维激光扫描同期进行,采用静态测量方式定期监测,也是三维激光扫描时标靶的位置,以便拼接每站点云的数据。点云数据将与GNSS监测点统一到同一坐标系中,以便融合两类数据进行滑坡体的变形分析。在滑坡对面设置两个基准点,其位置坚固稳定,每期施测时对其稳定性进行检测。
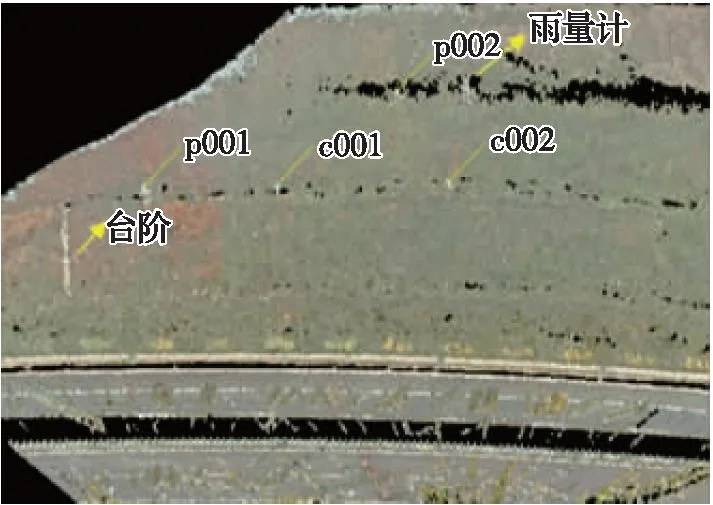
图2 监测点位分布
2.2 切片拟合数据分析
图3为p002处天线整流罩两期的点云数据叠加效果,可以看出明显的变形,但准确的变形值要通过点云切片拟合后的圆心位置提取。表1为整流罩p002处拟合的圆信息。两期圆心位置在x方向有4 mm的变化,在y方向有5 mm的变化,这可能是由于整流罩本身未处于铅锤位置或拟合误差所导致的。因此,针对不同高程处的切片分别估计了圆心位置。第1期数据拟合后验后单位权中误差为1.1 mm,第2期为0.7 mm。这主要是由于在第1期扫描数据时,两站到p002的距离均约为75 m;第2期扫描数据时一个测站距离p002约为75 m,另一个测站点距离p002约为14 m,扫描得到的点位精度较高,且第2期切片上参与拟合的点数更多。由于点云数据本身存在误差,匹配半径时难以做到完全相等。根据两期半径最邻近情况共匹配了6个圆,根据6个圆心的位置变化得到平均变形:在x轴方向(沿公路方向)变形0.037 m,在y轴方向(垂直公路方向)下滑0.178 m,下沉0.075 m。

表1 p002天线整流罩不同高程处圆心变形信息
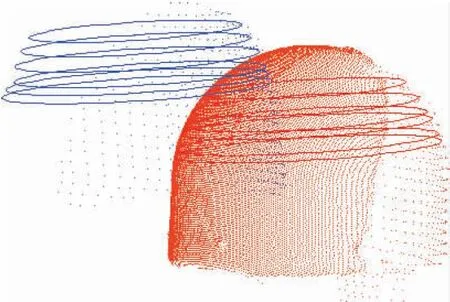
图3 p002天线整流罩两期点云及拟合圆
第2期参与拟合p002这6个圆的点云数量为1027个。由图4可以看出,大部分拟合残差都在2 mm以下,残差超过2 mm的共有23个,这些点位都是在距离约75 m的测站采集得到的,与仪器标称的在50 m处点位精度为3 mm较一致。
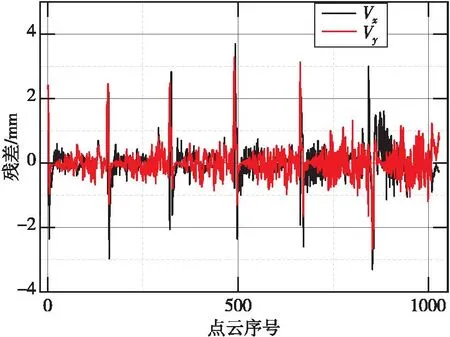
图4 p002第2期拟合残差
采用相同方式对p001处的点云进行处理,得到其平均变形为:在x轴方向变形0.026 m,在y轴方向下滑0.005 m,下沉0.066 m。另外,与p001、p002在此期间采用GNSS监测变形结果相比,在x、y方向的差异小于8 mm,在高程方向的差异小于15 mm,说明两种技术手段有较好的一致性。
2.3 面式监测数据分析
由于边坡表面覆盖有较多的植被,且表面是极易受雨水冲刷影响的土层,难以通过数字地面模型的对比发现整体变形,但可以通过布设在边坡上的雨量计外围设备两期点云数据达到类似面式监测的目的。如图5所示,蓝色为第1期点云,红色为第2期点云,可以看出明显的变形。根据雨量计围栏及立杆上的特征点判断出雨量计下沉0.08 m,在x轴方向变形0.034 m,在y轴方向下滑0.102 m。

图5 雨量计外围设备两期点云数据对比
边坡上修建了水泥台阶,如图6所示,蓝色为第1期点云,红色为第2期点云,可以明显看出其下沉的趋势;且台阶沉降量由上到下逐渐减小,上方沉降量约为0.07 m,与p001较近,沉降量也基本一致。

图6 水泥台阶两期点云比对
3 结 论
(1)根据两期点云数据可以看出,边坡已经出现了明显的下滑,最大下滑为0.178 m,出现在p002处;最大沉降量为0.08 m,出现在雨量计处,最大下滑和沉降均在滑坡体的上方。
(2)通过拟合GNSS天线整流罩的点云数据,可以提取圆心的变形信息,实现点式监测,并能对点云的数据质量作出评估,监测精度与GNSS的精度一致。
(3)通过边坡上的水泥台阶及传感器外围设备的点云,可以在一定程度上实现面式监测。
(4)对于植被覆盖的土质边坡,可以多布设一些自制的具有规则形状的标志,通过增加监测点位,提高监测成果的可靠性。
猜你喜欢
固体火箭技术(2023年3期)2023-07-08
航天返回与遥感(2021年5期)2021-11-11
陕西水利(2018年6期)2018-12-14
导弹与航天运载技术(2018年3期)2018-12-09
城市建筑空间(2018年12期)2018-08-26
少年科学(2016年6期)2017-02-08
水利规划与设计(2016年9期)2017-01-15
水科学与工程技术(2016年2期)2016-07-10
西南交通大学学报(2016年6期)2016-05-04
河南水利与南水北调(2015年16期)2015-06-12
