
自动配制静脉输液药物机器人的设计研究
2024-01-16 07:16卢中凯夏信堂
中国设备工程 2024年1期
卢中凯,夏信堂
(山东大学附属儿童医院器材设备管理科,山东 济南 250000)
目前,我国大多数医院静脉输液药物由人工配制,配制过程中存在一定的职业危害,如针尖刺伤,西林瓶、安瓶瓶割伤等操作风险,长期进行药物配制,容易对配药护士造成药品飞沫及锐器伤害,严重影响其生活质量和生理功能。人工配药不仅占据了宝贵的医护资源,而且还会造成人员疲劳过度导致配药效率低下,差错率升高。发生如SARS、COVID-19 等突发性公共卫生事件时,人工配药难以满足临床需求。深圳卫邦科技发明的WEINAS 系列配药机器人每完成一次配药,均需要人工取药,人工更换溶媒袋,注射器、清理医疗垃圾及摆放药品,自动化程度比较低;意大利Health Robotics 公司研制的CytoCare 配药机器人不仅价格昂贵,而且需要多人值守;加拿大Intelligent Hospital Systems 公司研发的RIVA 是一款比较成功的全自动静脉药物配制机器人,但其执行机构过于复杂,占地面积较大。针对以上问题,本文研发设计了一种自动配制静脉输液药物机器人,其成本低廉,结构紧凑,占地面积小,不仅能够自动存储输送待配药品,批量更换注射器,自动取药及清理药物垃圾,而且能够实现多种规格西林瓶及安瓿瓶药物的自动配置,提高了配药效率,节省了宝贵的医护资源。
1 设计
自动配制静脉输液药物机器人本体结构示意图如图1 所示,其机械系统主要包括层流净化装置模块、多功能配药机械手模块、药品自动输送装置模块、三坐标取药机械手模块、药品输出装置模块、注射器储存装置模块及废料储存装置模块,机器人系统的整体尺寸为长1170 ㎜、宽780 ㎜、高2000 ㎜、总重量约为1200 ㎏。
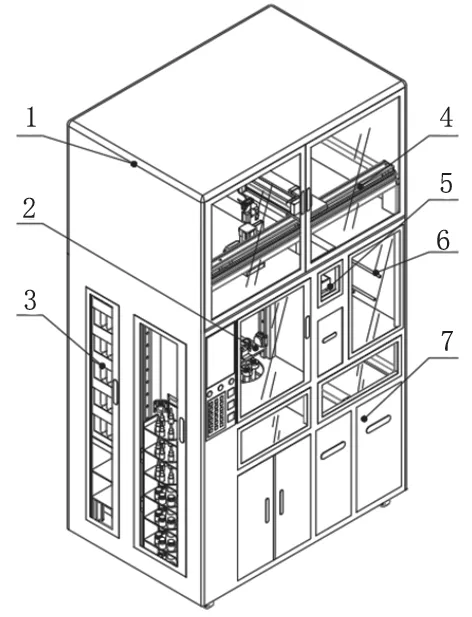
图1 自动配制静脉输液药物机器人本体结构示意图
为了保证配药环境的洁净度,自动配制静脉输液药物机器人顶部安装层流净化装置模块,左侧空间内设置有药品自动输送装置模块,上部空间内设置了与药品自动输送装置模块衔接的三坐标取药机械手模块,三坐标取药机械手模块下部设置有多功能配药机械手模块,多功能配药机械手模块的右侧设置药品输出装置模块和注射器储存装置模块,注射器储存装置模块下部设置有废料储存装置模块。
1.1 多功能配药机械手模块的设计
多功能配药机械手模块整体结构分为上层模块、中层模块和下层模块三部分,各部件之间均采用螺栓固定,多功能配药机械手模块整体结构示意图如图2 所示。
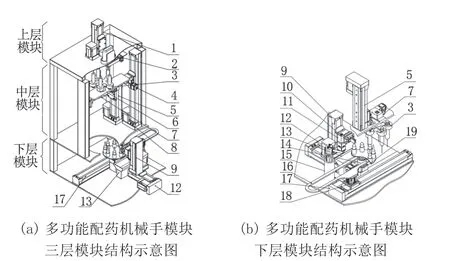
图2 多功能配药机械手模块整体结构示意图
上层模块设置有自动打印装置和溶媒袋固定夹手。自动打印装置用于打印患者用药信息,将信息自动黏贴在溶媒袋固定夹手所夹持的溶媒袋上。
中层模块设置有旋转固定板、定量抽吸机械手、第一旋转电机、第二旋转电机、第一竖直运动机械手、注射器固定盘。定量抽吸机械手及第二旋转电机均安装在旋转固定板上,通过第一旋转电机带动旋转固定板上的部件进行180°转动,在第一竖直运动机械手的作用下,实现注射器插入和拔出药瓶和溶媒袋的动作;通过第一旋转电机带动注射器固定盘旋转以实现注射器固定盘上注射器的更换使用;通过定量抽吸机械手夹持注射器活塞杆进行定量抽吸注射药品。
下层模块设置有第一水平运动机械手、精密气缸、托盘架、旋转托架、第四旋转电机、消毒系统、药瓶夹手、第二竖直运动机械手、第三旋转电机、第二水平运动机械手、废料漏斗。在第二水平运动机械手和精密气缸的作用下,实现托盘架的水平运动和上下运动,以同步完成托盘架自药品输送装置药瓶取药工位取药移动安放至旋转托架工位和空药瓶输送至废料代取工位,第四旋转电机带动旋转托架动作以实现待用药品旋转至药瓶夹手下部的开启药瓶工位和注射器抽吸药品工位,药瓶开启前,在消毒系统的作用下对药瓶进行消毒杀菌。药瓶夹手在第二竖直运动机械手的作用下实现夹取药瓶竖直运动,在第三旋转电机的作用下,实现开启药瓶和药品摇匀动作;第二竖直运动机械手在第一水平运动机械手的作用下,夹持开启的药瓶废料运动到废料漏斗上方,将药瓶废料丢进废料漏斗滑入废料储存装置模块。
1.2 药品自动输送装置模块的设计
药品自动输送装置模块如图1 中3 所示,其内部由流利条、固定架、溶媒袋盛放盒、溶媒袋托盘、直线导轨、输送机械手、视觉检测装置、药瓶托盘、药瓶盛放盒组成。
为减小摩擦,将滑动摩擦变为滚动摩擦,采用流利条安装在固定架上,以便于溶媒袋盛放盒上下运动;溶媒袋盛放盒通过卡槽层层叠放后最下层溶媒袋盛放盒再通过卡槽安装在溶媒袋托盘上,溶媒袋托盘安装在直线导轨和输送机械手上;视觉检测装置安装在固定架上,用于检测西林瓶和安瓿瓶,药瓶托盘固定在直线导轨和输送机械手上,药瓶盛放盒通过定位孔安装在药瓶托盘上;两条直线导轨和两套输送机械手分别安装在溶媒袋自动储存输送侧和药瓶自动储存输送侧的固定架上,以实现溶媒袋和药瓶独立输送至各自取药工位,以便于三坐标取药机械手模块和多功能配药机械手模块取药。
1.3 三坐标取药机械手模块的设计
三坐标取药机械手模块主要包括X 轴机械手、Y 轴机械手、Z 轴机械手、取药夹手和安装架组成,安装架采用焊接固定,其余部件采用螺栓固定,其结构示意图如图3 所示。

图3 三坐标取药机械手模块结构示意图
两侧的X 轴机械手固定在安装架上,Y 轴机械手固定在两个X 轴机械手上部,Z 轴机械手固定在Y 轴机械手上,取药夹手固定在Z 轴机械手上,X、Y、Z 三个机械手联动以实现取药夹手抓取溶媒袋盛放盒,并夹取溶媒袋放置在溶媒袋固定夹手上进行配药,待配制完成后,取药夹手再将溶媒袋夹取放置在药品输出装置模块内等待输出。
1.4 药品输出装置模块的设计
药品输出装置模块包括输出机械手、承载盒和输出装置盛放盒输出机械手安装在输出装置盛放盒内,承载盒固定在输出机械手上,输出装置盛放盒固定在整套系统的框架上,当三坐标取药机械手模块将放置在承载盒上的溶媒袋盛放盒摆满配置完成的药品后,通过输出机械手送至人工取药的窗口。
1.5 废料储存装置模块的设计
废料储存装置模块包括废料滑道、夹手、第一旋转机械手、废料盒、第二旋转机械手、药品盛放盒回收箱,各部件之间采用螺栓固定。
废料滑道连接废料漏斗与废料盒,将废料由废料漏斗滑入废料盒,夹手处于废料代取工位,以夹取托盘架输送的装有空药瓶的药瓶盛放盒,由第一旋转机械手旋转180°将药瓶盛放盒中的空药瓶倒入废料盒中,再由第二旋转机械手旋转180°将药瓶盛放盒放入药品盛放盒回收箱,以便药瓶盛放盒消毒后再利用。
1.6 层流净化装置模块及注射器储存装置模块的设计
将层流净化装置模块采用螺栓固定安装在机器人的最顶部,以便于更好地对机器人内部进行净化,保障配药环境的洁净度。注射器储存装置模块安装在机器人的最右侧,内部可以有序放置装满注射器的注射器固定盘,以便于快速更换多功能配药机械手模块使用完成的注射器。
根据安瓿瓶、西林瓶及注射器的常规规格设计相对应的安瓿瓶、西林瓶药品及注射器的盛放模块以便达到快速更换药品和注射器的目的,提高配药效率。
1.7 电机选型
多功能配药机械手模块中第四旋转电机选用伺服电机,其选型步骤如下:药品及药瓶托盘的总重量即为负载M 大约1.5kg,药瓶托盘直径为150mm,最高转速60rpm。
负载部分的惯量:JL=MD2/8=1.5×225/8=42.2 kg·cm2;假设减速机减速比为1∶R, 则折算到伺服电机轴上负载惯量为42.2∶R2,按照负载惯量JL/ 电机转子惯量JM<3 倍的原则,如果选择50W 伺服电机,JM=0.0035kg·cm2,则42.2/R2<3×0.0034,R >64,输出转速r=3000/64=47rpm,不能满足要求。如果选择100W 伺 服 电 机,JM=0.0098(kg·cm2),则42.2/R2<3×0.0098,R >38,输出转速r=3000/38=79rpm,根据以上计算,第四旋转电机选择松下MSME 100W 伺服电机满足要求。
根据同样的选型方法第一旋转电机选择MSME 150W伺服电机,第二旋转电机选择MSME 75W 伺服电机,第二旋转电机选择MSME 50W 伺服电机,其余单轴移动式机械手均采用不同行程的MISUMI 单轴机器人RS3 马达并列型。
输送机械手采用伺服电机驱动滚珠丝杠完成药品输送,其伺服电机选型步骤如下:药品、药瓶托盘及药瓶盛放盒的总重量即为负载WA大约20kg,滚珠丝杠长度BL为1m,滚珠丝杠直径BD为0.04m,滚珠丝杠螺距BP为0.04m,滚珠丝杠效率Bη为0.9,移动距离0.6m,联轴器惯性JC=10×10-6(kg·cm2);加速时间ta为0.1s,匀速时间tb为0.8s,减速时间td为0.1s,循环时间tc为30s,移动距离0.6m。
滚珠丝杠质量为:
负载部分的惯量:
惯量比为
若选1.5kW,
最高速度
1/2×ta×Vmax+tb×Vmax+1/2×td×Vmax=0.6m,最高速度
转速
(2kW 伺服电机额定转速);
移动转矩
加速转矩
减速转矩
有效转矩
(2kW 伺服电机额定转矩);
根据以上计算,选择松下MSME 2kW 伺服电机。
三坐标取药机械手模块中,X 轴机械手采用MISUMI单轴机器人RSH5 直柱型,Y 轴机械手和Z 轴机械手采用不同行程的MISUMI 单轴机器人RS3 马达并列型。输出机械手采用MISUMI 单轴机器人RS3 马达并列型,废料储存装置模块中旋转电机均采用MSME 50W 伺服电机。
2 使用方法
由于单台自动配置静脉输液药物机器人占地面积较小,其既可以在临床科室和输液中心单机使用,也可以在静配中心多台机器人联机使用。
当在临床科室及输液中心护士使用自动配置静脉输液药物机器人进行配药时,医生下达处方传输至机器人系统,经过机器人系统处方数据审核无误后,通过显示器提示需配制药品的摆放顺序,护士根据提示按照顺序将瓶装药品和溶媒袋药液分别摆放在药瓶盛放盒和溶媒袋盛放盒中,分别将盛放药品的药瓶盛放盒和溶媒袋盛放盒放在指定的药瓶托盘和溶媒袋托盘上,准备就绪后,点击显示器中的开始配药按钮进行自动配药,大约40s左右配置完成,提示取出配置完成的药品,护士根据提示取出药品给患者用药。
在配药过程中,可以随时添加其余患者的配药信息,为其余患者摆放待配药品,以提高配药效率。
当在静配中心配药时,因相同配药处方数量较多,可以采用多台机器人联机的流水线式配药方式,配药护士只负责将同种待配药品放在同一机器人的药品自动输送装置模块中,由机器人自动加药,按照配药顺序将上一机器人加药完成的溶媒袋药液转入下一机器人进行加药直至药液配制完成,配药期间需要护士按时更换注射器。
3 创新点
本文设计的自动配制静脉输液药物机器人相比国内外研制的配药机器人创新点如下。
(1)增加了药品自动储存输送装置,将待配药品按照顺序排放在储存装置中,为保证配药过程的连续性,可以随时增加待配药品,提高了配药效率。
(2)针对配药流程及西林瓶、安瓿瓶药品规格的多样性,对多功能配药机械手模块进行分层次的模块化设计,各模块之间相互紧密配合完成配药,实现一机多能。
(3)增加了药品输出装置模块和废料储存装置模块,每袋药品配制完成后,无须打开舱门人员干预取药和清除医疗垃圾,保证机器人内部配药环境的洁净度和配药的连续性。
(4)自动配制静脉输液药物机器人占地面积小,操作简单,既可以适用于临床科室及输液中心进行单机配药,也可以适用于静配中心联机流水线式配药。
4 结语
本文研发设计的自动配制静脉输液药物机器人结构设计合理,操作简单,节省了人力成本,不仅解决了待配药品的储存及输送问题,而且能够对多种规格的安瓿瓶及西林瓶药品进行配制,实现了自动取药及自动清除医疗垃圾的功能,保证了配药环境的洁净度,提高了配药的效率,降低了配药的差错率,能够快速高效地应对如SARS、COVID-19 等突发疫情造成的静脉输液药物的急剧增长,缓解医护人员的救治压力。
猜你喜欢
医疗装备(2023年12期)2023-07-12
中国卫生标准管理(2022年13期)2022-07-29
现代制造技术与装备(2021年11期)2022-01-04
临床合理用药杂志(2021年13期)2021-01-31
诗选刊(2020年3期)2020-03-23
西南军医(2016年3期)2016-01-23
大众健康(2015年6期)2015-06-16
西北药学杂志(2014年4期)2014-11-02
天然产物研究与开发(2014年8期)2014-04-27
中国卫生产业(2011年17期)2011-08-15
