
基于试重法解决直升机旋翼动平衡调整问题
2024-01-17 07:41冯启发赵鹏举文建峰
现代制造技术与装备 2023年11期
冯启发 赵鹏举 文建峰
(中国人民解放军69008 部队,五家渠 831300)
旋翼系统是直升机产生振动的主要来源,锥体及桨叶振动需要通过检测和调整实现有效控制。振动产生的原因,是在飞行(地面试车、平飞、悬停)的过程中,桨叶在稳定转速条件下,作用在各片桨叶上的离心力不同,旋翼中心将会产生离心力合力,导致其水平方向发生振动。振动大小取决于桨叶离心力不平衡量。旋翼桨叶处在每转进行一次气动环境变化的状态,因此会产生持续气动激振力。受机体对尾流阻塞作用的影响,桨叶每次转动也会产生一次交变气动激振力,各片桨叶的气动激振力与质量力共同构成桨毂力,造成直升机振动。
更换单个或多个上下夹板组件、阻尼器或阻尼器带柄轴承、旋翼弹性轴承时,新旧机件强度和疲劳程度不一致或工装安装机件过程中误差把握不严等,都会影响直升机的旋翼动平衡。旋翼动平衡调整不符合规律变化、空中地面振动相位分离、设备初始相位移位等,会导致振动值难以调整到合格水平的情况。调整时,采用重新装配阻尼器及带柄轴承、复装夹板组件和调换桨叶等方式,工作量较大且效果具有不确定性,使得外场旋翼动平衡调整工作非常被动。为此,基于试重法总结出一套行之有效的方法,以便针对性解决此类问题[1]。
1 基于试重法的动平衡调整原理
试重法的本质是利用初始振动、试重和加重后振动组成的矢量关系,通过极坐标系作图法确定桨叶位置,进而计算出应加载的配重和位置[2]。试重法原理图如图1 所示。首次开车检查,初始振动为0.86 cm·s-1,相位50°,即图1 中的A点,不符合动平衡小于0.51 cm·s-1的要求。现任选一片桨叶(4 号),加上配重P后重新开车测量,结果为0.91 cm·s-1,相位112°,即B点处。连接A、B,以AB方向为4 号桨叶配重的加载方向,即AB是4 号桨叶加上P质量后产生的偏移量。这个偏移量使振动从A点转移到B点。由于AB平行于4 号桨叶,可以确定4 号桨叶的位置,进而确定所有桨叶在坐标系中的相位,图1中的1~5 线条表示桨叶。利用图1 中的振动点A,可以概略计算出相应桨叶上的调整配重。需注意,由于是在初始振动基础上添加的配重,计算出来的结果应减去试重调整的配重。
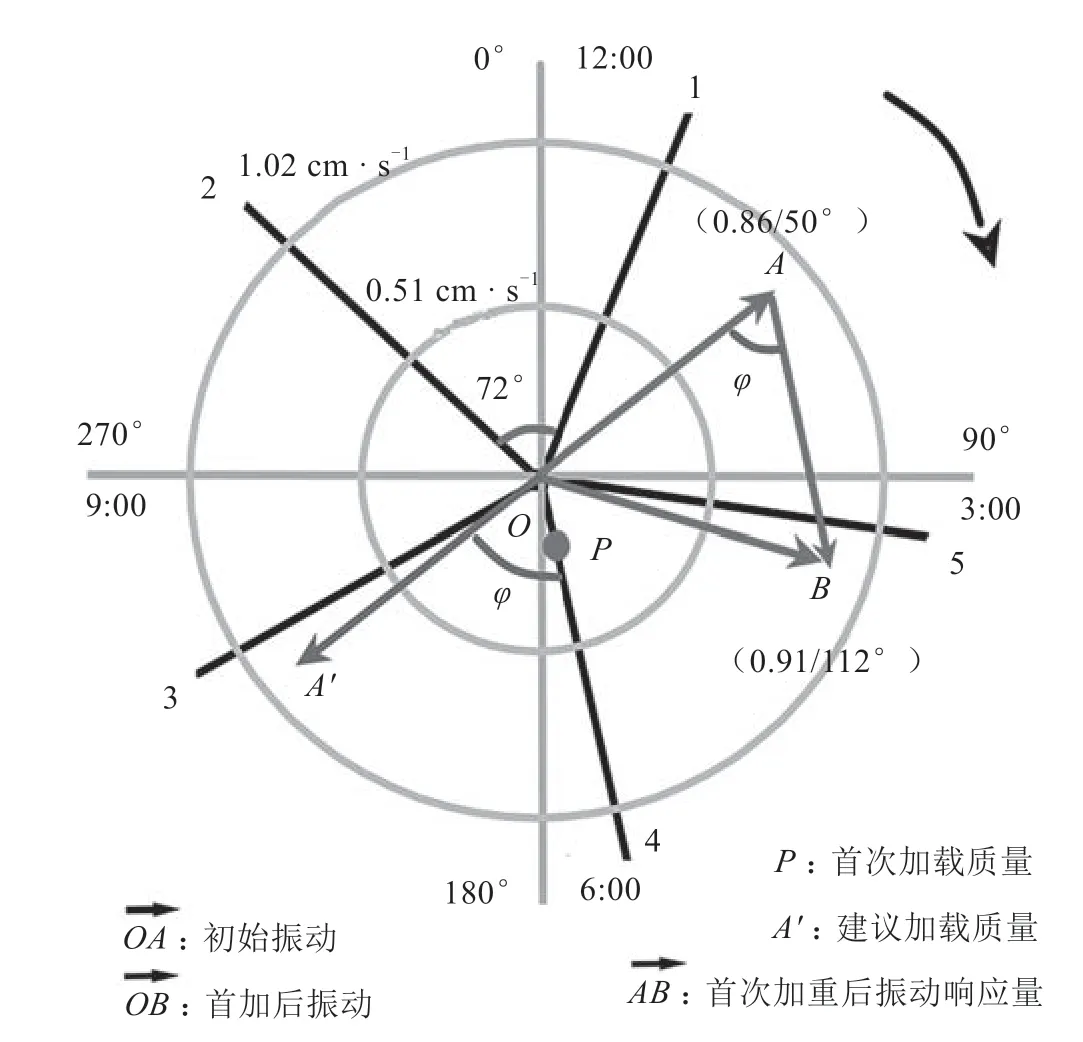
图1 试重法原理图
试重法可以根据地面和空中的振动大小及相位变化情况,重新绘制地面和空中的相位图,查看地面和空中相位图的差异,定性定量分析振动变化的情况,从而找到变化规律,有针对性地进行动平衡调整,为外场旋翼动平衡调整工作提供依据[3]。
2 旋翼动平衡调整步骤及外场实际操作过程
根据桨叶的特点,可以认为各加载点加载产生的振动响应的相对相位与桨叶加载点布局一致,各加载点分布半径相同,而且位于同一个平面。为了便于现场绘制,事先准备好调整参考图,参考图上标有不同半径的同心圆和角度,分别代表相应的振动值和相位。首先,测量初始状态的动平衡振动值和相位,并在参考图中绘出该动平衡状态点。其次,选择任意一处支臂,加载一个试配重块,测量动平衡值,并在图中绘出加载后的动平衡状态点。再次,在图中做出该支臂单独加载的振动响应矢量,并以矢量方向作为支臂动平衡加载的坐标轴方向。最后,俯视或仰视旋翼,保证各支臂处于顺时针旋转状态。由于各支臂加载坐标轴的相对位置与支臂加载点布局一致,以试加配重的支臂坐标轴相位为基准,绘制出各坐标轴的加载坐标图,再根据平衡振动矢量和坐标轴的相对角度关系,找到合适加载的支臂。具体配重质量根据质量和振动幅值的比例关系确定。
根据相关技术文件和手册规定,旋翼最终动平衡值应小于0.51 cm·s-1。因此,如果动平衡调整合格,对应的动平衡点应落在代表0.51 cm·s-1的圆形区域内。以国产测振设备XZD-1 为例,介绍旋翼动平衡调整外场实际操作过程。旋翼系统共5 片桨叶,该设备基准相位黄色桨叶为0°,俯视逆时针旋转分别为黄、红、黑、白、蓝色桨叶,每两片桨叶之间的相位为72°,桨叶旋转方向为俯视顺时针状态。划分10组进行外场动平衡调整,数据如表1 所示。

表1 动平衡调整数据表
根据表1,对第1 组、2 组、3 组、6 组、7 组、8 组和9 组进行配重调整,符合试重法的条件,因此运用试重法的原理绘制示意图,如图2 所示。图2 中,空心点、虚线为根据地面振动数据绘出的图像,实心点、实线为根据空中振动数据绘出的图像,带圈的黄、红、黑、白、蓝标记点为此设备桨叶的基准相位。
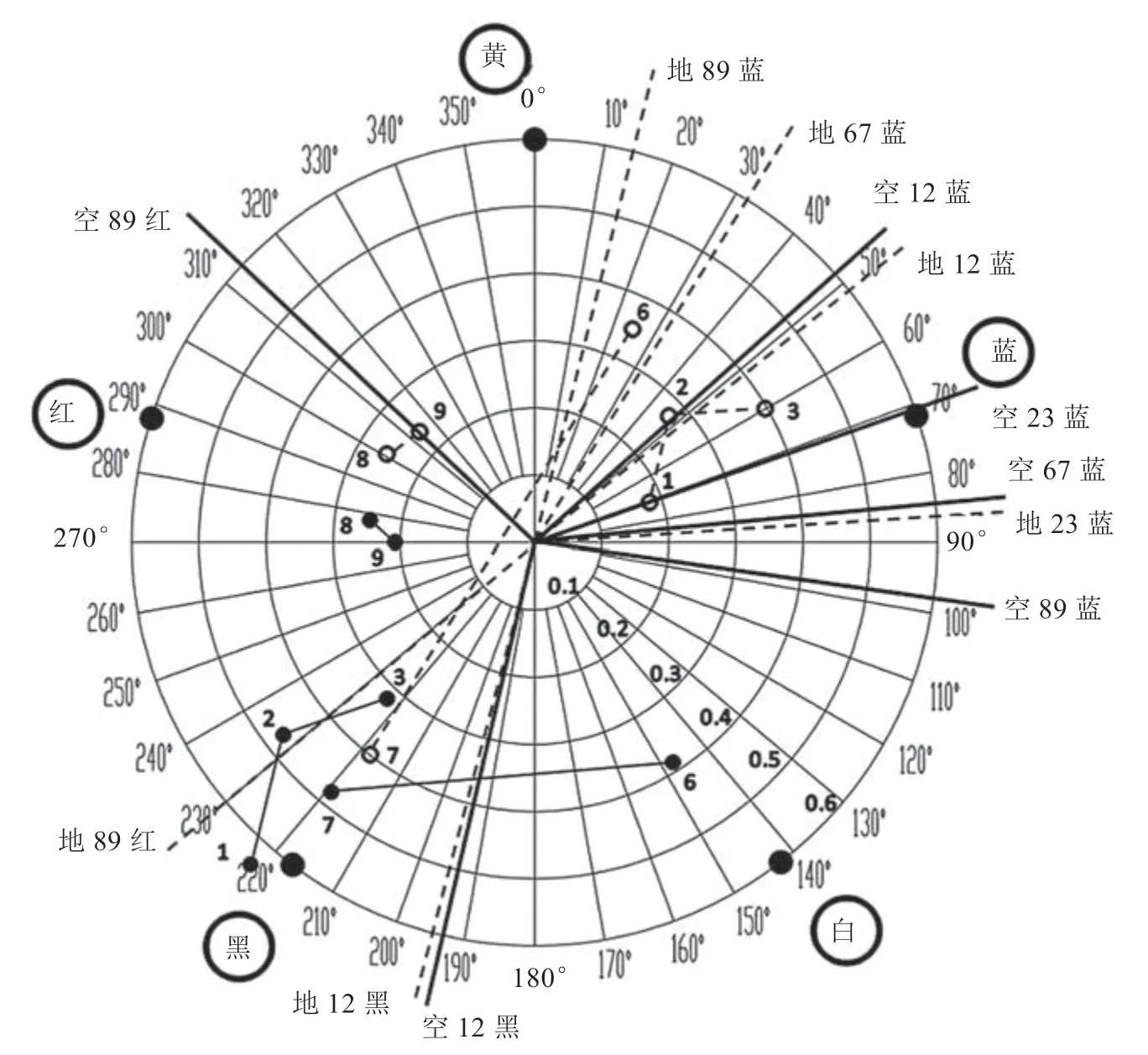
图2 试重法示意图
测出第1 组数据后,得知空中和地面(下文简称空地)振动相位相反,而且空中数值较大,因此先按照空中振动数据进行调整,依据基准相位黄色桨叶在0°位置,初步判断振动点在黑色桨叶附近,可以减去黑色桨叶的2 片配重。减重后重新测量,可知空中振动减小,地面振动增大,第2 组数据基本符合规律变化。根据第1、2 组数据确定的桨叶位置,可以判断第2 组数据在蓝色桨叶附近,而且空地振动相位相反,空中数值较大。按照第2 组空中振动数据进行调整,在蓝色桨叶上增加2 片配重,再重新测量,测得空中振动减小,地面振动增大,第3 组数据基本符合规律变化。分析第1~3 组数据,空地的相位和基准相位基本吻合,差距不大,但是空地呈现的振动点不在同一个位置。这会导致空中振动不断减小的同时地面振动逐渐增大,而且空地振动数值相差较大不能同时调整到合格要求。
在配重调整无法继续时,调整变距拉杆长度,对旋翼锥体再做调整。调整锥体会改变振动相位,让空地振动相位发生变化,达到减小空地振动相位夹角的目的,方便空地振动的统一调整。需注意,该设备的锥体一直处于动态变化,每次调整配重后都会造成旋翼锥体的变化。根据频闪仪测量结果将白色和蓝色桨叶同时增加6 个齿后,测得第4 组振动数据有所下降。继续优化旋翼锥体水平度,红色和黑色变距拉杆各减少3 个齿,测得第5 组数据结果不太理想。根据第5 组数据,并结合前4 组数据,确定在黑色桨叶上加3 片配重,得到第6 组振动数据。第6 组数据空地都在蓝色桨叶一侧,因此在蓝色桨叶上减去2 片配重,测得第7 组数据。分析第6、7 组数据可知,这2 组数据变化量太大,不符合规律,但是此时的空地振动相位夹角变小。结合空中旋翼锥体情况,再次调整旋翼锥体,黑色桨叶变距拉杆减少2 个齿,蓝色减少6个齿,测得第8 组振动数据,可知空地振动值都有所降低,而且空地振动相位基本保持一致[4-5]。按照第8 组数据,在红色桨叶上减掉1 片配重,测得第9 组数据。这组数据空地振动都有所减小,但变化极小。再在红色桨叶上减去3 片配重,测得第10 组振动数据,空地振动都符合要求。
通过数据分析和图2 可以看出:实线所示的空中振动数据比较稳定,相位变化较小,而且和基准相位相差不大;虚线所示的地面振动数据变化量较大,而且距基准相位偏差较大,导致地面动平衡调整过程中变化不符合规律或变化量较小。因此,在调整中应以空中数据为准,并关注地面振动的变化,逐步实现空地振动数据都符合要求。
在前2 次的动平衡调整中,空中和地面的振动大小不一致,相位基本相反,导致调整达不到振动值0.51 cm·s-1以下的要求。从第6~10 组数据可以看出,虽然空地振动点位置统一,但是相位却逐渐分离。因此,应通过试重法的原理在外场分析数据,相对准确地把握数据变化的规律,有针对性地调整空地的振动水平,从而满足振动值要求。
针对动平衡调整出现较为复杂的情况,每次调整时尽量采取单一的调整方式。只使用配重块调整或拉杆长度调整的方式,配重块调整也只在一片旋翼支臂上进行增减。多次采用试重法测量多组数据,进行全面和准确的绘图分析,了解直升机动平衡调整中的变化规律,为后续的工作提供有效有利的依据。
3 结语
在直升机动平衡调整过程中,会遇到空地振动相位角度相差较大,调整后出现一方振动减小、一方增大,不能同时满足要求的情况,或调整后出现地面配重调整效果明显,而空中配重调整不太明显,未按预期目标变化等问题。试重法可以满足各种旋翼的动平衡调整要求,通用性强,方法简单,工具设备需求也不高,只要提前准备好调整参考图,现场就可以快速准确地分析并简单快捷地操作,避免了盲目操作,降低了工作难度,省时省力,能够及时有效地解决问题,保证设备的完好率。为此,基于试重法解决直升机旋翼动平衡调整中的疑难问题,有效分析直升机空中地面的振动数据,并有针对性地提出解决方法和措施,使得空地振动数据都符合要求。
猜你喜欢
一重技术(2021年5期)2022-01-18
小猕猴智力画刊(2020年5期)2020-06-01
物理实验(2019年4期)2019-05-07
水利规划与设计(2017年8期)2017-12-20
科技资讯(2016年13期)2016-05-30
水利科技与经济(2016年2期)2016-04-21
系统工程与电子技术(2016年2期)2016-04-16
河北地质(2016年1期)2016-03-20
中国中医药现代远程教育(2014年23期)2014-03-01
组合机床与自动化加工技术(2014年9期)2014-03-01
