考虑测量误差的CUSUM控制图对维纳过程的监控设计
2024-01-24 11:06刘利平王晓雪马强
中国医疗设备 2024年1期
刘利平,王晓雪,马强
1.南京师范大学 商学院,江苏 南京 210023;2.南通大学 公共卫生学院,江苏 南通 226019
引言
具有高精度性操作化要求的医疗设备消耗磨损越大,设备的状况就会越差,随着设备磨损的加剧,设备退化过程可能会加速,导致其寿命进一步缩短[1],不仅会对医生开展工作造成不便,而且不利于医疗设备的维修保障工作,从而给医院造成医疗器械使用延误、降低服务质量以及增加维修费用等损失。因此精准预测并及时发现医疗设备的故障从而进行适当的维护工作非常重要,这需要对设备的退化过程进行建模分析。汪岱涵等[2]考虑了维修成本下高值设备的成本控制问题,基于所收集的医疗设备真实寿命数据的传统分析方法存在耗时长、数据少等特点,结合随机过程进行退化过程模拟的方法不仅具备一定的数据优势,还为医疗设备的故障预测与健康管理提供了可靠的建模方法。
在随机过程中,由于退化过程通常是连续的,因此连续状态的随机过程具有较好的模拟能力。目前主流的随机退化过程包括维纳过程、伽马过程和逆高斯过程3 类。其中,维纳过程具有明确的物理意义,同时可以用于刻画非单调的退化过程,在实际运用中有较好的泛化能力[3]。
对维纳退化过程的研究主要集中于通过参数估计和模型构建的方法刻画设备剩余使用寿命[4],对物理退化过程建模的方法往往假定设备所处的物理环境和运行负荷相对稳定,因此其基本假设为设备状态数据服从稳定的概率分布。但在医疗设备产品的生命周期中,退化过程会呈现出不同的分布,并且在不同的阶段中呈现出不同的退化速率[5]。例如,Bae 等[6]提出了一种适合两阶段退化模式的分层贝叶斯变点回归模型,从而推导出过程失效的时间分布;Wang 等[7]构建了变点伽马和维纳退化模型来刻画液体耦合器退化变点的过程;胡胜等[8]构造多核向量机模型识别纺纱过程中出现的变点。
在现实对医疗设备的真实运行状态和剩余寿命进行评估时,对医疗设备运行情况数据的测量过程往往受到测量设备和测量人员等因素的影响,导致所测量数据与真实退化数据之间存在偏差[9]。在现有基于维纳过程进行监控的相关研究中,考虑测量误差影响的研究相对较少。为实现对医疗设备退化异常的监控预警,本文将根据维纳随机过程的增量特性,运用统计过程监控领域中累积和(Cumulative Sum,CUSUM)控制图方法,对医疗设备退化加速的异常情形进行预警,以期在实践中尽早发现设备运行异常波动从而提高医疗设备的可靠性。
1 维纳过程退化模型
维纳过程在物理学中也称布朗运动,是一种连续时间随机过程,在随机分析、扩散过程建模中有着广泛的运用。在退化过程研究中,常用带有正漂移的线性维纳过程刻画,其表达式如式(1)所示。
式中,漂移系数λ为退化速率;σ为退化过程的扩散系数;B(t)~N(0,1)为标准布朗运动。
维纳过程的典型特征是其具有独立平稳增量,即在某一时间区间上的增量概率分布独立于其他时间区间增量的概率分布,见式(2)。
式中,0≤s<t;σ>0;W(0)=0。因此,维纳过程的增量分布仅与时间间隔有关。
以往研究表明利用上述带有正漂移维纳过程刻画设备退化过程的模型具有较好的解释能力,并被广泛用于设备剩余使用寿命预测领域中[10]。在线性维纳过程模型中,通常假定设备退化速率μ 恒定。但在实践中,同一批医疗机械设备的退化速率不仅受到时间变异的影响,也会受到由于原材料和制造过程所产生的个体差异的影响,从而导致同类设备的退化过程存在差异。为刻画退化速率的个体差异性,有学者提出了带有随机效应的维纳过程,其假定退化率μ 服从正态分布,利用退化率的方差刻画不同设备之间退化率的差异[11]。本文分别探讨对上述两类维纳过程的监控。将退化率恒定的维纳过程记为固定效应模型,其表达式如式(3)所示。
式中,下标F表示退化率恒定。将引入随机效应的非线性过程记为随机效应模型,其表达式如式(4)所示。
式中,下标R表示退化率随机。退化率服从正态分布λR~N(μλ,σλ2),均值μλ刻画退化率,方差σλ2用于刻画个体差异。
2 含有测量误差的维纳过程
2.1 双成分测量误差模型
在医疗设备质量管理实践中,医疗设备质量输出值的变化包含两个方面:① 源于生产制造过程的变化,是质量监控需要及时发现并解决的问题;② 输出值的变动是由测量设备或测量人员所引起的,并且这种难以避免的测量误差也会受到所测量值大小的影响,即被测量值越大,产生的测量误差越大。因此,测量值与真实值之间的误差值也会随着真实值的变化而变化,即测量误差与被测量值存在非线性关系。Linna 等[12]提出了线性协变量误差模型用于刻画这种非线性关系,而Rocke 等[13]提出的双成分组合测量误差模型近年来受到了更多认可,其双成分测量误差模型包含了乘性测量误差与加性测量误差,表达式如公式(5)所示。
式中,Yt为t时刻的观测值;Xt为t时刻观测过程的真实值;α和β为给定系数;乘性误差η和加性误差∊分别服从均值为0 的正态分布η~N(0,ση2)、∊~N(0,σ∊2)。
2.2 含有双成分测量误差的维纳过程
由于测量仪器或测量人员所导致的误差无法避免,而忽视测量误差会降低对退化模型中参数估计的精准性,因此将测量误差纳入维纳过程模型中更加符合真实的观测过程。Peng 等[11]的研究中同时考虑了带有随机效应和测量误差的维纳过程,其表达式如式(6)所示。
其中,服从正态分布的退化率λ用于刻画随机效应,服从正态分布的∊用于刻画测量误差。虽然目前诸多对维纳过程的研究中考虑了测量误差对剩余使用寿命概率参数估计的影响[14],但研究中均假定测量误差服从单一分布,且测量误差与维纳过程之间是线性关系,未考虑测量误差与观测值之间存在的非线性关系。因此,本文将考虑带有双成分测量误差的维纳过程,即在公式(6)中引入公式(5)的乘性测量误差,其表达式如式(7)所示。
对于固定效应的维纳过程模型,退化率λF恒定;对于考虑了随机效应的维纳过程模型,退化率λR服从正态分布N(μλ,σλ2)。
3 CUSUM控制图
3.1 上侧CUSUM控制图
在生产制造过程中,控制图能够用于区分随机因素与系统因素引起的波动:当生产过程的波动是由随机因素引起时,被视为过程受控;由系统性因素引起的过程被视为过程失控。通过控制图进行预警,能够快速监测到过程输出值出现的异常漂移,保证设备处于受控状态。CUSUM 控制图和指数加权移动平均图(Exponentially Weighted Moving Average,EWMA)对小漂移更加敏感。CUSUM 的计算原理是监测样本值与目标值之间的正负累积偏差(根据偏差的正负可分为上侧和下侧CUSUM统计量)。由于过程均值所产生的微小波动能够引起累积偏差值较大的变动,适合检测由于设备损耗等引起的偏移过程[15]。因此,本文选用CUSUM 控制图对维纳退化过程中退化率的漂移进行监控。在医疗设备的实际退化过程中,由于物理腐蚀、磨损等情况,物理退化速率往往呈现退化加速的状态,因此本文选用上侧CUSUM控制图对维纳过程的退化加速状态进行监测预警。
控制图需假定i时刻的样本测量值Yi满足独立同分布,因此本文利用维纳过程增量独立同分布的特性,用退化过程的增量值作为控制图的观测值,代替对连续退化状态值的直接监控。根据公式(2)中维纳过程增量特点,带有双成分测量误差的维纳过程增量的计算方法如式(8)所示。
其中,取增量时间间隔t2-t1=…=ti-ti-1=Δt,则控制图的样本观测值计算方法如式(9)所示。
由于时间间隔Δt取值为常数,因此各时间点上维纳过程的增量分布相互独立,增量值的变动仅与退化率λ、扩散系数σ和乘性测量误差ση相关。
3.2 考虑双成分测量误差的CUSUM控制图
生产观测值的波动既包含了生产过程真实值的波动,也包含了测量仪器或观测者的测量误差所导致的波动。在实际应用当中,由于测量误差难以观察,测量误差降低了控制图对失控过程的检测能力,尤其当测量误差的变动相较于过程波动较大时,控制图对过程波动的监测准确性受到显著影响[16]。因此,为了降低测量误差对监测效能的影响,学者对测量误差对控制图监控性能的影响做了大量研究,Cocchi 等[17]探究了双成分测量误差对休哈特控制图的影响;Abbasi[18]研究了测量误差参数的变动对EWMA 控制图效率的影响;胡雪龙等[19]采用中位数统计量提出了一种单边合格品链长控制图;王猛等[20]进行了准确度误差和精确度误差的质量控制检测。参照Abbasi[21]的方法,含有双成分测量误差维纳退化过程的上侧CUSUM 统计量公式(8)中,参考值k可设为公式(10)。
式中,λ'为处于失控状态下的异常退化率。为验证控制图策略对维纳过程中退化率异常加速的监测灵敏性,本文假设异常退化率λ'=(1+δ)λ,式中δ为给定的加速系数。对于固定效应模型,退化加速表现为λ'F=(1+δF)λF;对于随机效应模型,退化加速表现为μ'λ=(1+δR)μλ。
3.3 马尔科夫链法计算平均运行链长
平均运行链长(Average Run Length,ARL)和运行链长标准差(Standard Deviation of Run Length,SDRL)是衡量控制图误报率和监控灵敏性常用的指标。其中,ARL0表示过程受控时发出一次故障警报所需要的样本数量;ARL1表示过程失控时,从发生变异至控制图发出预警所需要的检测样本量。在受控ARL0相等情况下,失控ARL1越小,表明控制图越能快速对过程变异发出预警。
本文将运用Brook 和Evans 所提出的Markov 链法计算上侧CUSUM 控制图ARL,具体的状态转移矩阵及ARL 和SDRL 的测量公式如Evans[22]研究中所示。
4 模型仿真
运用蒙特卡洛仿真方法生成不同退化率设定下的维纳过程退化值,并在生成随机数时将双成分测量误差纳入考虑。参照Ye 等[23]对激光器退化过程模型的参数估计结果,首先假设医疗设备的退化服从固定效应维纳过程,并将退化模型参数初始值设为:设备的初始退化速率λF=2.014,设备的初始退化扩散系数σF=0.398;其次,假设医疗设备的退化过程可能服从随机效应维纳过程,并将参数初始值设为:设备的初始退化率μλ=2.015,考虑随机效应的设备初始退化率个体偏误σλ=0.413,设备初始退化扩散系数σR=0.340。各参数组合下均生成步长为10000 的维纳过程仿真值且重复100 次。运用Markov 链方法计算CUSUM 控制图的ARL 并以此来衡量控制图的性能。本文将过程状态划分为500 个子区间,以受控ARL0=370 确定CUSUM 控制图的控制限参数L,并根据所生成的退化过程增量值计算状态转移矩阵中的概率值。
为评估控制图对退化率加速漂移的监控效率,取设备退化率的加速系数δ为不同水平值δ∈{0,0.05,0.1,0.15,0.2,0.3,0.4,0.5,0.6,0.8,1}。由于本文将考虑带有测量误差的设备退化监测,因此将取不同水平的乘性误差的正态分布方差ση以表示不同程度的测量误差,借鉴以往乘性测量误差,本文取水平值为ση∈{0.025,0.05,0.075,0.1,0.15,0.2}(乘性误差系数β=1),监控效果如表1(固定效应模型)和表2(随机效应模型)所示。随着退化率的加速系数δ的增加,即控制图的ARL 越小,控制图能够越早发现异常退化加速状态。

表1 ση对CUSUM监控固定效应维纳过程的影响
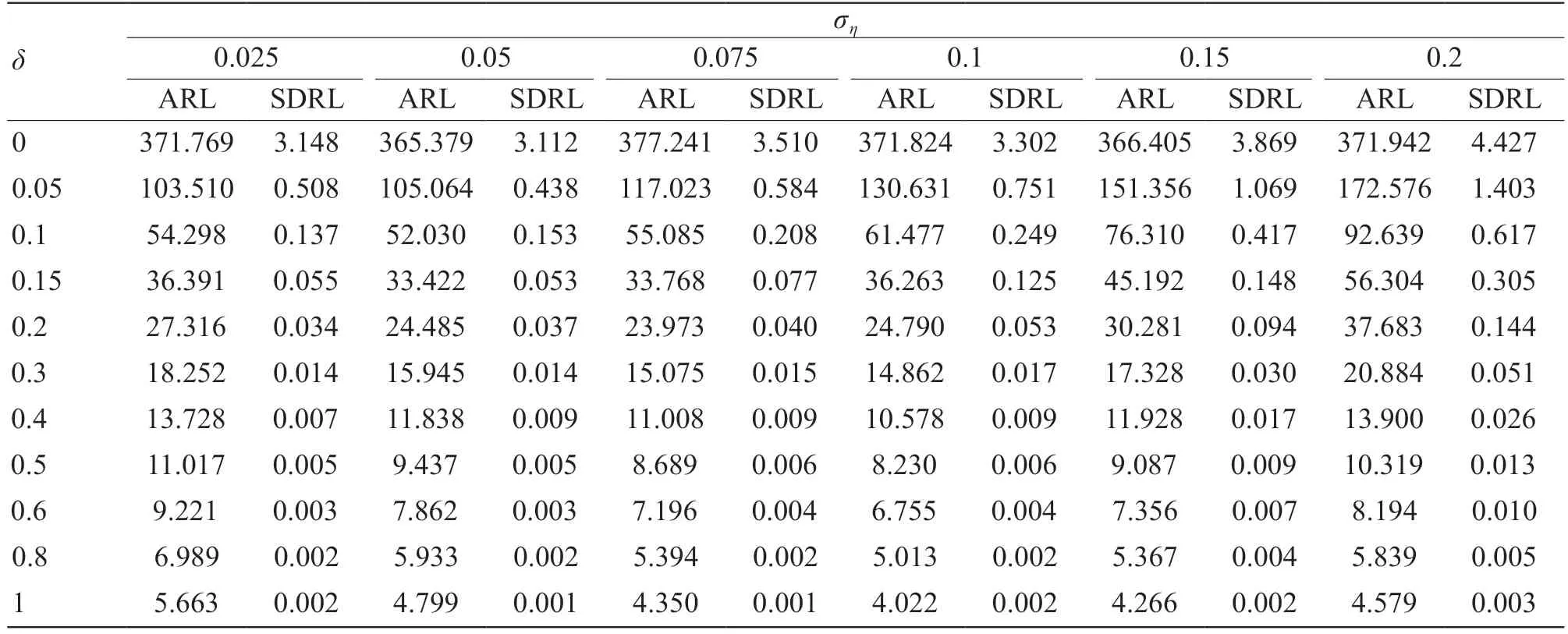
表2 ση对CUSUM监控随机效应维纳过程的影响
如表1 所示,对于固定效应模型,随着乘性误差ση参数的增加,CUSUM 控制图在失控状态下的ARL 随着乘性误差的增加而增加,即由于测量误差的存在,使得控制图对设备的异常退化的监控性能下降,从异常发生到发出预警信号需要更长的时间。对于同一乘性误差参数ση,无论乘性测量误差系数ση如何变动,当加速系数从0.05 增加至0.1 时,ARL 的降低率均维持在43%左右,即控制图对加速系数δ的监控具有稳健性。对于引入了随机效应的维纳退化过程模型(表2),当乘性误差ση<0.1 时,CUSUM 的表现没有明显变化趋势,因为当退化模型中考虑了随机效应后,测量误差对控制图的监控效率的影响并不明显;而当ση>0.1 后,随着乘性测量误差的增加,ARL 和SDRL 均有显著增加,监控性能显著下降。因此,对于考虑随机效应的维纳过程,较小的测量误差不会对监控效率产生显著影响。
参考Abbasi[18]的研究方法,变动乘性误差系数β∈{1.0,1.2,1.4,1.6,1.8,2.0}。在不同的加速系数δ下,CUSUM 的监控效果分别如表3(固定效应模型中乘性误差ση=σF)和表4(随机效应模型中乘性误差ση=σR)所示。对于两种类型的维纳过程,随着参数β的增加,CUSUM 控制图对退化加速异常预警能力均有一定下降,即当乘性误差系数增加时,测量误差所占比重增加,导致了控制图效率的降低。

表3 系数β对CUSUM监控固定效应维纳过程的影响

表4 系数β对CUSUM监控随机效应维纳过程的影响
由表3 和表4 可得,随着乘性误差系数值的增加,控制图的ARL 略有增加,控制图发现过程退化异常敏捷性有所下降,监控性能受到一定的影响。因此,在实际应用过程中,需要重视对乘性误差系数精度的估计,以减少由于估计偏差带来的对监控性能的影响。
5 总结
本文探讨了对系统退化领域的医疗设备退化率加速现象的监控,其中将系统退化过程假定为该领域常用的维纳过程。与利用观测值进行退化路径建模和剩余有效寿命预测方法不同,本文主要利用维纳过程的增量独立特征对该过程进行监控,从而有效监测到真实情况中退化加速的现象并进行预警。在使用CUSUM 控制图进行监控设计的过程中,不仅考虑了退化率固定不变以及带有随机波动的退化率两种维纳过程,还考虑了乘性测量误差对控制图效率的影响。仿真结果表明,CUSUM 控制图对退化加速现象具有良好的监控能力,测量误差的增加会削弱监控效率,但该削弱效果在考虑了随机效应的维纳过程中并不明显。
猜你喜欢
湖南理工学院学报(自然科学版)(2022年1期)2022-03-16
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
应用数学(2020年2期)2020-06-24
电子世界(2017年17期)2017-09-14
中国惯性技术学报(2017年1期)2017-06-09
小天使·二年级语数英综合(2017年4期)2017-04-18
初中生世界·八年级(2016年9期)2016-05-14
初中生学习·高(2015年12期)2016-01-08
电测与仪表(2015年18期)2015-04-12
小樱桃·童年阅读(2015年1期)2015-03-11