狭窄空间智能巡检机器人设计及运动分析
2024-01-25 11:45李鹏程郝文静闫红玲
运城学院学报 2023年6期
李鹏程,郝文静,闫红玲
(1.运城学院 机电工程系,山西 运城044000;2.临汾投资集团有限责任公司 山西 临汾 041000)
近年来,随着国家工业化的快速发展,化石燃料的使用量急剧增加,煤矿的开采力度不断加大[1-3]。由于煤矿开采环境复杂,开采过程中会产生有毒气体等危险物质,严重危害操作人员的身体健康[4]。此外,煤矿、洗煤厂设备众多且庞大,使得大多数工作空间较为狭窄,人工巡检难以完成、人工巡检周期较长这些问题都给巡检工作带来不便。为了降低巡检工作的危险系数、提高巡检的工作效率,设计适应于狭窄空间的智能巡检机器人显得十分必要[5-7]。
由于矿业环境的特殊性,近年来许多学者对矿用机器人进行了相应的研究。陈骋设计了用于矿用消防的灭火机器人并利用蒙特卡洛算法完成了机器人的实时定位[8]。商德勇等设计了煤矿用煤矸石分拣机器人,提高了智能化分选的水平[9]。学者肖毅等人研究了煤矿变电站的巡检机器人,并对机器人的位姿进行了自适应调整[10]。学者贾宇涛设计了一种带式输送机智能巡检机器人,实现了带传动的无人值守,提高了工作效率[11]。
针对煤矿和洗煤厂的特殊工作环境,本文设计了一种三轮式智能巡检机器人。该巡检机器人采用轮式驱动、体积较小、结构简单可靠、功能齐全。机器人可以顺利通过曲率半径为400 mm,宽度为145 mm的狭窄空间完成巡检任务。这对煤矿和洗煤厂的巡检智能化有着重要的提升作用。本文所设计的机器人具有一定的工程使用价值,而且本文对巡检机器人运动的研究可为矿用机器人的运动特性研究提供一定的理论参考。
1 智能巡检机器人系统设计
1.1 巡检机器人设计参数
煤矿、洗煤厂环境比较恶劣,大多数地段会有一定的坡度而且有坡度倾斜角,为了更好地完成巡检任务需要机器人安全平稳运行。因此所设计的机器人需要有一定的斜坡运动能力、续航能力以及良好的功能性。为了满足狭窄环境的巡检工作,机器人的设计需要满足表1的技术要求。

表1 矿用巡检机器人设计要求
1.2 巡检机器人机械结构设计
矿用巡检机器人驱动方式主要采用直轮驱动,行走装置有三轮组成,前轮主要起支撑作用,驱动力由后边两个轮提供,每个驱动轮由单独的电机驱动。直轮式矿用巡检机器人主要由前置摄像头检测系统、气体检测系统、控制系统、机器人主体装置底板以及驱动系统组成。其结构如图1所示。
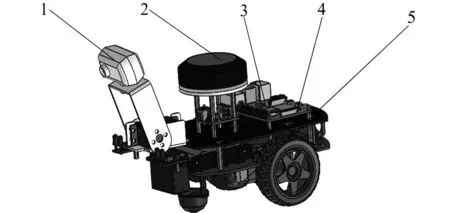
1-前置摄像头检测系统;2-气体检测系统;3-控制系统;4-机器人主体装置底板;5-驱动系统。图1 狭窄空间巡检机器人装置结构示意图
1.2.1 装置驱动系统
为了满足巡检机器人在复杂矿业环境中的运动、方便机器人的行走,每个驱动轮都由各自独立的电机进行驱动,控制系统通过控制电机的转动速度,改变轮1和轮2的速度来完成巡检机器人的顺利转弯。驱动系统结构图如图2所示。由于巡检机器人既需要在相对平整的行走环境行走也需要在凹凸不平的运行环境中行走。可通过更换机器人的前轮来使得机器人适应不同行走环境。如下图所示,牛眼万向轮仅适用于相对平整的行走面,为了满足凹凸不平的环境可更换带有万向架的直轮,直轮的示意图如图3所示。此外,该机器人还能在管道中行走。前轮可以使用连接式六角螺栓螺母。装置可以根据运行环境更换前支撑轮。

1-牛眼万向轮;2-连接式六角螺栓螺母;3-驱动轮装置。图2 狭窄空间巡检机器人驱动装置示意图
1.2.2 机器人巡检系统
机器人的检测系统主要由前置摄像头检测装置、气体检测装置以及防爆保护壳体这几部分组成。前置摄像头检测装置可用于检测巡检机器人的巡检路况以及各类装置的工作状况。具体而言就是机器人的传感器系统将反映检测机器人前方矿井状况、设备工作状况的图片传至上位机并可以进行储存。并且此装置可以根据实际使用过程中的需求,利用控制系统控制摄像头支撑架的舵机,完成摄像头检测装置的上下升降。车身主体上安装有有毒气体检测装置,检测装置主要是由各类传感器组成。实际应用中可以根据需要安装不同类型的传感器,比如利用传感器进行矿井巷道内的温度、湿度以及有毒气体浓度等指标的检测等。摄像头检测装置下部安装有报警警示灯和蜂鸣报警器。无论是前部摄像头检测装置还是气体检测装置都和报警装置联合使用,只要检测系统检测到异常情况,报警装置就会起到作用。由于矿井的恶劣环境对巡检机器人加装了防爆壳体来,实现对巡检机器人的保护。巡检机器人的巡检系统如图4所示。

1-前置摄像头检测装置;2-报警指示灯装置;3-蜂鸣报警器;4-摄像头支撑架;5-调节调角舵机;6-气体检测装置;7-防爆壳体。图4 机器人巡检系统示意图
1.3 巡检机器人控制系统设计
巡检机器人主要满足狭窄空间的巡检任务,为了提升机器人的自动化水平,就对机器人的控制系统有了较高的要求。因此机器人巡检系统由巡检机器人、数据传输装置以及上位机人机交互平台组成。主要是各类传感器与主控制模块来进行相关数据的采集。装置的控制方案如图5所示。机器人的巡检流程图如图6所示。
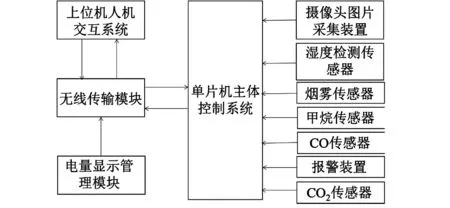
图5 巡检机器人工作方案

图6 巡检机器人巡检流程图
2 巡检机器人的运动分析
为使机器人在巡检过程中顺利通过狭窄空间,对机器人运动特性进行研究至关重要[12]。本文对机器人弯曲环境的通过性进行分析,检测一定曲率半径弯曲环境中机器人的转弯特性。
2.1 机器人的转弯分析
将机器人视为理想的刚性原件进行简化处理,如图7所示选取一定的曲率半径,看装置是否与环境形成干涉,产生卡堵现象。图中令O为坐标系的原点,r表示弯曲环境中心到原点的距离。b为机器人的宽度,t为机器人的长度,D为弯曲环境两障碍物之间的距离。OP表示原点到远离原点的机器人远端的距离,OP与弯曲环境相交于点y。

图7 巡检机器人转弯通过性示意图
如果巡检机器人顺利转过弯曲环境应该满足以下条件:
(1)
即应该满足下式数学关系:
(2)
其中,r=400 mm,D=160 mm,t=240 mm,将这些数据带入式(2)中可得机器人的宽度应该小于144.8 mm才能顺利通过障碍宽度为160 mm的弯曲路况。
在转弯的过程中,驱动轮H1靠近曲率中心(轮速为v1),驱动轮H2靠近曲率中心(轮速为v2)设轮子到所走弯曲路线中心距离为Q(假设机器人转弯轨迹为以曲率中心为圆心得圆弧)。转弯过程中两轮速度之间的关系满足:
(3)
2.2 转弯过程中考虑滑移时的运动分析
机器人在进行转弯时利用差速原理控制两个驱动轮具有不同的速度来达到转弯的效果。但是在机器人运行过程中轮子和接触面之间的滑移不可避免,因此需要考虑滑移时的运动状况。建立相应的模型如图8所示。在图中vt为沿着行走方向的滑移,vs为垂直行走方向的滑移,ω和ω1分别为没有滑移和有滑移的角速度,θ为转弯过程中的运动角度。v则为理想状态机器人转弯时质心速度。

图8 考虑滑移时的转弯模型图
存在滑移时转弯运动学模型为:
(4)
经过分析转弯滑动的运动学模型为:
(5)
3 巡检机器人的仿真分析研究
ADAMS是较为常用的动态仿真软件[13]。本文将所设计的巡检机器人的三维模型导入ADAMS软件中进行相应的模拟分析。在进行分析时需要对模型进行简化并且对无关的零部件作布尔求解,设置一定的仿真时间,模拟设置曲率半径为400 mm,障碍物之间距离为160 mm的弯道环境。经过仿真可以得出下文叙述中的仿真图。
经过分析可知转弯过程中的巡检机器人质心会发生一定程度的位移变化,质心变化的仿真图如图9所示。
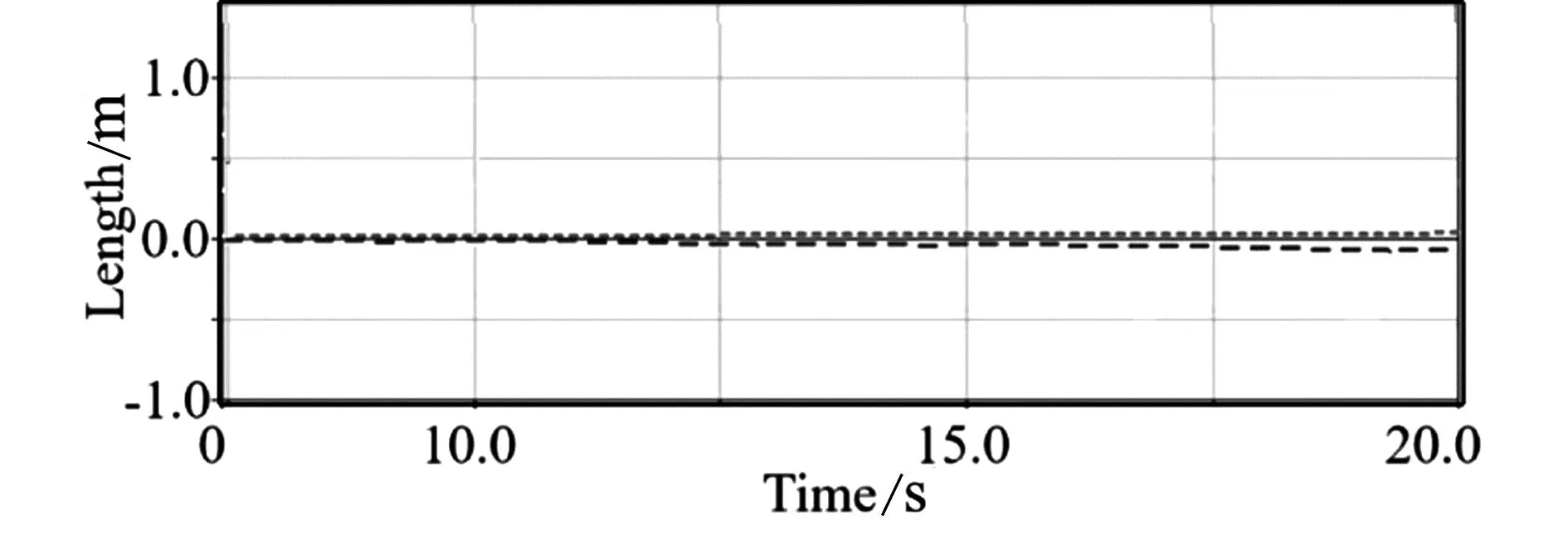
图9 机器人质心在X、Y轴方向的位移变化曲线
质心在X、Y两方向产生一定的位移变化是因为运动过程中的差速转弯,运动惯性造成机器人产生一定的滑移。但是由于两驱动轮轮速之间的比例关系不会造成质心产生较大的位移,转弯过程中机器人的质心轻微的位移变化不会影响转弯过程。经分析,机器人可以顺利转弯。
靠近弯道曲率中心的轮速v1和远离弯道的轮速v2在转弯过程中随时间的变化曲线如图10所示。两轮的速度变化趋势是不同的,这是为了顺利通过弯道,对两轮进行了差速控制。远端轮子轮速v2呈现先增大后慢慢减小,而近端轮子轮速由直道进入弯道时开始持续减少直到通过弯道。在转弯过程中远端轮子速度在某一瞬间达到最大值,最大值出现在机器人到达弯道的极限位置处。

图10 巡检机器人转弯过程中两驱动轮的速度变化曲线图
4 相关的实验验证
搭建轮式巡检机器人模型,并使用搭建的模型进行简单的转弯测试,在实验室内自行摆放相应的障碍物,组成可供实验的模拟弯道。搭建的机器人实验装置如图11所示。

图11 狭窄空间巡检机器人试验样机及实验图
对转弯过程进行实验,记录转弯时间,得到实验和仿真数据如表2所示。将实验数据和仿真数据进行对比可以发现,实验所得数据总是小于仿真模拟得出的数据,这是由样机转弯过程中轮子与地面之间的摩擦以及机器人样机搭建中的误差等实际因素造成的。

表2 巡检机器人转弯实验、仿真数据表
5. 结论
(1)文中设计的狭窄空间轮式巡检机器人具有结构简单、方便携带、续航能力较好以及体积较小的优点。两轮差速驱动,保证机器人顺利过弯,可以完成狭窄空间的巡检任务。
(2)对机器人的转弯运动进行了分析,并且得出弯道曲率半径与机器人尺寸之间的关系,保证了巡检机器人弯道通过性。经过仿真分析可知机器人在转弯过程中质心会有轻微的变化,但是不影响机器人的运行。为更好地研究机器人的运动在机器人转弯过程中应适当考虑机器人运行过程中产生的滑移现象。在转弯过程中两驱动轮轮速需保证一定的比例关系才能顺利通过弯道。转弯时近端轮速逐渐较小,远端轮速先增大后减小。通过对轮速的有效控制达到顺利过弯的目的。
(3)搭建巡检机器人试验样机,利用样机进行转弯实验,实验数值与仿真数值有一定的误差但是误差较小,实验仿真对比验证了巡检机器人设计的合理性。本文巡检机器人的设计与研究可为狭窄空间作业机器人的研究提供一定的参考。
猜你喜欢
中国港湾建设(2022年12期)2022-12-28
数学物理学报(2022年4期)2022-08-22
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
北京航空航天大学学报(2021年4期)2021-11-24
中国新技术新产品(2020年4期)2020-05-05
数学物理学报(2019年5期)2019-11-29
科技创新导报(2016年27期)2017-03-14
航天器工程(2014年5期)2014-03-11