
基于四桥臂拓扑的开绕组永磁同步电机预测电流控制策略研究
2024-01-26 02:32李绍民周欣沂
微特电机 2023年12期
岳 通,于 剑,魏 国,李绍民,周欣沂
(西南技术物理研究所,成都 610041)
0 引 言
具备高功率密度、高效率的永磁同步电机已被广泛应用在了电动汽车、高铁、电动飞机等各个领域[1-3]。然而,出于对安全、效率和成本的考虑,需要使用低功率的电力电子器件和电压等级更低的直流电源;为了获得更高的输出电压等级和更宽的调速范围,需要提高直流母线电压的利用率[4]。
开绕组永磁同步电机(以下简称OW-PMSM)将中性点打开,每相绕组分别接入逆变器桥臂,这种拓扑结构可以实现多电平控制效果,提高直流母线电压利用率并且具有拥有更好的容错能力[5]。传统的OW-PMSM需要6个逆变器桥臂进行驱动,而星接电机只需要3个逆变器桥臂进行驱动,降低了成本。与星接驱动拓扑相比,共直流母线OW-PMSM四桥臂控制系统所需的功率器件只多了三分之一,并且与传统OW-PMSM可以达到相同的直流母线电压利用率。在正弦直流偏置磁阻电机中的应用中,与传统OW-PMSM相比,共直流母线OW-PMSM在达到相同性能的同时,功率损耗降低了约15%[6]。
共直流母线四桥臂控制系统存在零序回路,会导致零序电流产生,从而降低系统效率并增加转矩脉动。针对共直流母线四桥臂控制系统零序电流的抑制可以参考共母线双逆变器系统。文献[7]系统地分析了共母线OW-PMSM零序电流产生的原因,并指出逆变器侧调制产生的共模电压以及永磁同步电机永磁体的反电动势三次谐波共同作用产生。文献[8]采用共模电压为0的中矢量进行空间矢量脉宽调制,即通过逆变器施加共模电压为0的电压矢量,从而抑制零序电流。对于OW-PMSM来说,单纯消除逆变器调制产生的共模电压并不能完全抑制零序电流,因此需要添加额外的零序电流抑制器,以主动抑制零序电流。在此基础上,文献[9]考虑到了逆变器死区产生的零序电流,采用零序电流闭环控制器,通过比例积分控制器调节参考值和测量值之间的误差,产生零序电压参考值以抑制零序电流。然而,比例积分控制器无法实现无稳态误差的交流分量跟踪。因此,文献[10-11]设计了零序电流闭环控制回路,考虑了永磁体反电动势三次谐波产生的零序电流,并通过比例谐振控制器产生可控的参考零序电压,以提高性能。
矢量控制由于内部采用电流环控制,控制系统的复杂度增加,同时其动态性能较差。
预测电流控制(以下简称PCC)无需电流环,具有结构简单以及灵活的控制方式等优点,因此得到了广泛应用。文献[12]将模型预测控制引入到了共直流母线OW-PMSM中,考虑了OW-PMSM存在零序通路,建立了dq0轴定子电流的价值函数,并选取最优电压矢量。同时,在此基础上基于电流DB控制思想,直接预测下一周期的参考电压,从而实现模型预测电压控制,简化了控制流程。然而,由于其特殊拓扑结构,文献[12]并未考虑零序电流对候选电压矢量选择的影响。文献[13-14]为了减少由于枚举电压矢量导致的计算量,建立了αβ0坐标系下的电压矢量分布图,确定了最佳电压矢量。文献[15]实现了基于abc坐标系下不使用价值函数的最佳电压矢量选择控制方法,与传统模型预测控制方法相比,计算时间缩短了61.05%,同时减少了零序电流。在此基础上,文献[16]利用双逆变器开关状态冗余特性,设计了价值函数去降低开关频率,同时并不影响最佳电压矢量的选取。
本文首先分析共直流母线OW-PMSM四桥臂控制系统的离散电流预测方程和一拍延时补偿方程,并建立模型预测控制基础模型;其次建立abc坐标系下的三维空间系统,并根据三维空间几何关系迅速选择出最优电压矢量;最后,提出0轴电压预测方程,通过无差拍调制的方法进一步降低零序电流。
1 共直流母线OW-PMSM四桥臂控制系统数学模型
共直流母线型四桥臂控制系统电路拓扑如图1所示。在共直流母线OW-PMSM四桥臂控制系统中存在零序通路,因此谐波部分也要考虑在内,其中永磁体三次谐波磁链是主要影响。
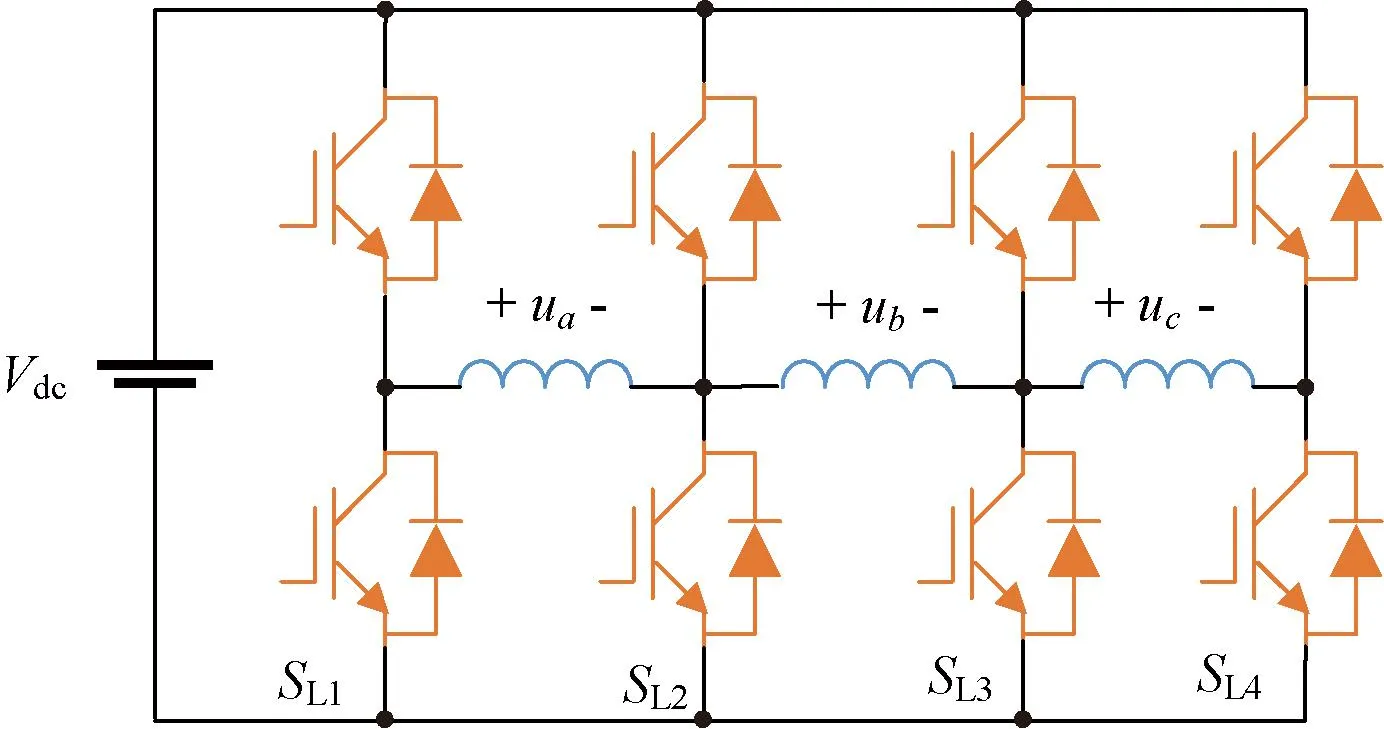
图1 共直流母线OW-PMSM四桥臂拓扑
根据共直流母线OW-PMSM四桥臂系统拓扑,三相定子电压值:
(1)
式中:SLx(x=1,2,3,4,5,6)代表第x个桥臂;SLx=1代表第x个桥臂的下桥臂开通,上桥臂关断;SLx=0代表第x桥臂的下桥臂断开,上桥臂开通。
由式(1)推导出共模电压:
(2)

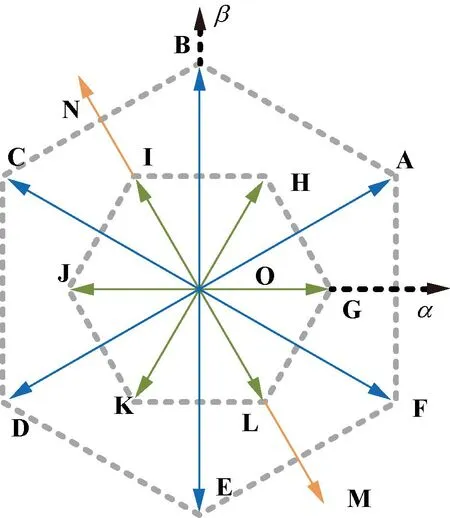
图2 电压矢量在αβ平面中的分布
由式(2)可知,中矢量六边形的电压矢量不会产生共模电压。开关状态组合如表1所示。

表1 中矢量开关状态组合
零序回路等效电路如图3所示。
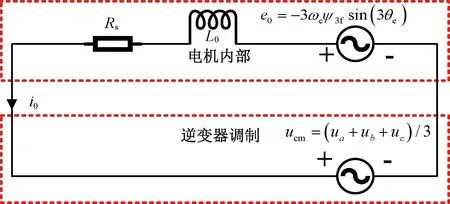
图3 OW-PMSM等效电路图
永磁体反电动势三次谐波:
e0=3ωeψ3fsin(3θe)
(3)
式中:ωe表示电机电角速度;ψ3f表示永磁体三次谐波;θe表示电机电角度。
2 OW-PMSM四桥臂控制系统PCC策略研究
2.1 四桥臂控制系统传统模型预测控制分析
模型预测控制核心是通过预测下一控制周期的电流值,从共母线OW-PMSM四桥臂的16个电压矢量中选择使得预先设定的价值函数最小的电压矢量,以实现电机的最优控制。
由于实际的控制系统主要是离散模型,其中前向欧拉法可以在较短的离散时间内获得较为精确的结果。对同步旋转坐标系下的电压方程运用前向欧拉法得到离散电流预测方程:
(4)
式中:id(k+1)、iq(k+1)、i0(k+1)为下一时刻的d轴、q轴、0轴电流;Ld、Lq、L0表示d轴、q轴、0轴电感;ud、uq、u0表示d轴、q轴、0轴电压;id、iq、i0表示d轴、q轴、0轴电流;Ts表示系统的一个控制周期。
实际控制系统受到硬件的影响,系统存在着采样或者计算延迟的问题。为了解决这一问题,需要对电机控制系统进行一拍时延补偿。具体而言,根据第k个周期的电流和转速以及当前施加的电压,推导出一拍延时补偿电流,以保证控制系统在下一个周期更加准确地跟踪期望值。一拍延时补偿电流:
(5)
于是,将得到的一拍延时补偿电流代入电流预测方程,第k+2个周期的电流预测方程:
(6)
模型预测控制需要根据实际约束和期望值的结果来决定价值函数的形式。在共母线四桥臂控制系统中需要将0轴电流也考虑在价值函数中,去实现电流的良好跟踪。价值函数的方程如下:

(7)

图4 常规模型预测控制框图
2.2 三维空间快速选择最佳电压矢量
上一节初步建立模型预测控制,由于开绕组共母线电路拓扑的特殊性,共有24=16种开关状态组合,这些状态组合可以形成15种电压矢量如表2所示,这对于实际硬件来说,计算过程复杂。同时,在αβ0坐标系下通过几何关系选择最优电压矢量的方法较为复杂,而且电压矢量的空间分布不够规则,本文提出基于abc坐标系三维空间快速选择最佳电压矢量的方法。

表2 共直流母线OW-PMSM四桥臂三相电压
abc坐标系下的所有电压矢量分布如图5所示。其电压矢量分布规律、几何关系容易找到,通过0.5Vdc、-0.5Vdc两个分界面,可以把相电压归类到Vdc、0、-Vdc。
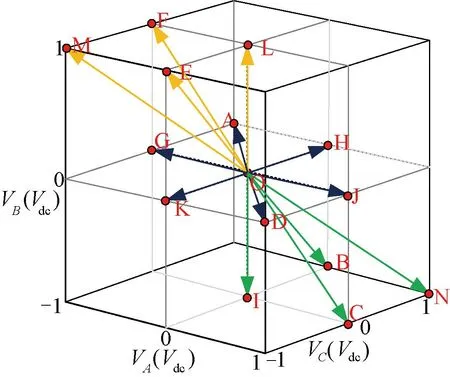
图5 abc坐标下电压矢量分布
其三相电压不是完全解耦的,A相和C相互相独立,B相和AC相互相共用桥臂,因此进行几何关系判断时,首先判断A相电压,其次判断C相电压,最后判断B相电压。
具体的几何关系判断,A相电压与0.5Vdc、-0.5Vdc比较,可以将所有电压矢量划分到三个区域中,如图6所示。在此基础上进行C相电压与0.5Vdc、-0.5Vdc比较,同样将电压矢量划分到三个区域中,最后进行B相电压的划分,具体划分如图7所示。

图6 候选电压矢量确定原则

图7 最优电压矢量确定原则
共母线OW-PMSM四桥臂abc坐标系下的模型预测控制系统框图如图8所示。
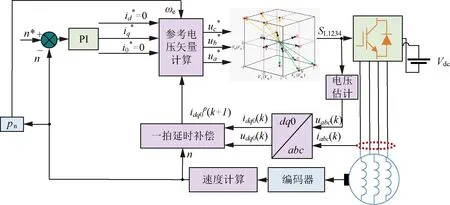
图8 abc坐标下模型预测控制框图
abc坐标下三维空间快速选择最佳电压矢量的实现有如下步骤。
状态量的测量:对三相负载电流、转子速度和直流母线电压的采样测量。
一拍延时补偿:将电压信号和电流信号变换并代入一拍延时补偿公式中,得到补偿电流。
参考电压矢量计算:根据无差拍思想计算abc坐标下的参考电压矢量。
选取最优电压矢量:根据最优电压矢量确定原则,选取最优电压矢量。
2.3基于无差拍PCC的零序电流抑制策略分析

(8)

图9 基于无差拍PCC的零序电流抑制策略控制框图

3 仿真验证及分析
为了验证控制算法的有效性,对共直流母线OW-PMSM四桥臂进行仿真。仿真所用的电机参数如表3所示。仿真验证中速度环PI参数设置为kp=0.1,ki=10。在t=0给定转速为200 r/min,t=0.1 s给定转矩1 N·m。

表3 OW-PMSM参数
图10~图14给出了候选电压矢量为中矢量的常规模型预测控制(策略Ⅰ)仿真波形、候选电压矢量为全部矢量的常规模型预测控制(策略Ⅱ)仿真波形、三维空间快速选择最佳电压矢量(策略Ⅲ)仿真波形以及基于无差拍PCC的零序电流抑制(策略Ⅳ)仿真波形。
策略Ⅰ电机性能如图10所示。从图10(a)看出,零序电流波动比较大,最小值为-0.16 A,最大值为0.16 A。三相电流有一定程度的畸变,转矩有一定程度的波动,转矩波动为0.29 N·m。A相电流最大值为1.70 A,最小值为-1.69 A,三相电流基本保持了120°的相位差,但不是完美的正弦形。dq轴电流在整个运行过程中,稳态时q轴电流为1.43 A,电流波动为0.42 A,稳态时d轴电流为0,电流波动为0.38 A。
策略Ⅱ电机性能如图11所示。策略Ⅱ相比策略Ⅰ对零序电流进行了有效抑制,三相电流基本保持了正弦形,d轴电流波动从0.32 A降到了0.18 A,q轴电流波动从0.42 A降到了0.22 A,转矩波动从0.29 N·m降到了0.19 N·m。这是因为采用中矢量作为候选电压矢量虽然没有引入共模电压,但是电机本身有反电动势三次谐波,所以零序电流并没有被抑制。

图10 策略Ⅰ仿真波形
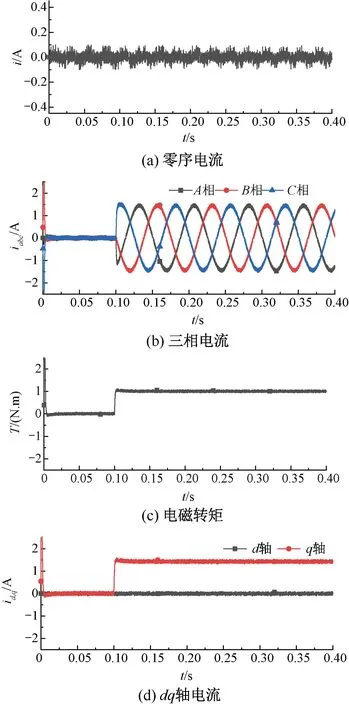
图11 策略Ⅱ仿真波形
策略Ⅲ电机性能如图12所示。策略Ⅲ相比常规模型预测控制,计算选择最优电压矢量对零序电流进行了有效抑制,A相电流THD从10.94%、1.03%降低为0.93%,q轴电流波动从0.42 A、0.22 A降到了0.18 A,同时不需要常规模型预测控制的大量计算,观察这三种方法,abc坐标系下几何空间选择最优电压矢量既抑制了零序电流,又减少了常规模型预测控制的大量计算,具有一定优势。
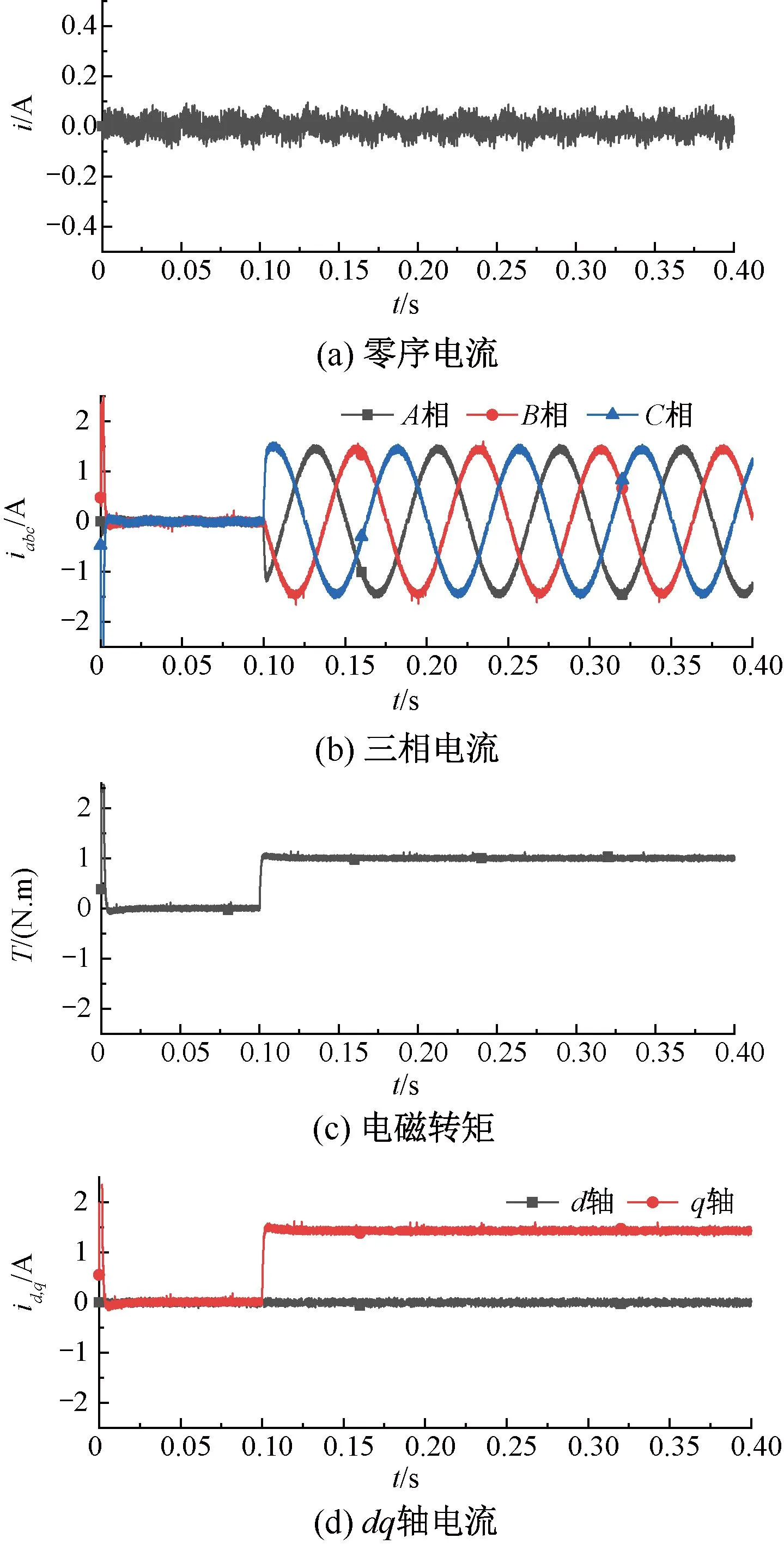
图12 策略Ⅲ仿真波形
策略Ⅳ电机性能如图13所示。零序电流波动非常小,最小值为-0.03 A,最大值为0.03 A。稳态时q轴电流为1.43 A,电流脉动为0.16 A;稳态时d轴电流为0,电流脉动为0.17 A。
无差拍PCC添加零序电流的抑制方法相比于abc坐标系下几何空间选择最优电压矢量对零序电流的抑制效果更好,同时也无需常规模型预测控制的计算量,减少了计算时间。
为了更好地比较策略Ⅰ、策略Ⅱ、策略Ⅲ以及策略Ⅳ的控制效果,图14展示了上述方法的A相电流谐波分析图,以进行直观的比较。

图13 策略Ⅳ仿真波形
在常规模型预测控制中,当候选电压矢量为中矢量时,谐波含量最高。这是因为中矢量的0轴电压分量为0,无法抑制反电动势三次谐波产生的零序电流,因此谐波含量远远高于其他三种方法。当候选电压矢量为全部矢量时,可以抑制零序电流的产生,但是由于共直流母线OW-PMSM四桥臂一共有24=16个电压矢量,计算量过大,因此实际中不采用这种方法。
三维空间快速选择最佳电压矢量和相比常规模型预测控制对零序电流进行了有效抑制,A相电流THD从10.94%、1.03%降低为0.93%,同时不需要常规模型预测控制巨大的计算量。
基于无差拍调制的PCC抑制零序电流策略在常规无差拍PCC的基础上进行了改进。在谐波含量方面,效果优于候选电压为全部矢量的常规模型预测控制,同时不需要候选电压为全部矢量的常规模型预测控制巨大的计算量。此外,该方法抑制零序电流的效果略微优于abc三维空间选择最佳电压矢量抑制零序电流的效果。
4 结 语
为了抑制共直流母线OW-PMSM四桥臂控制系统的零序电流,本文在预测电流控制方案基础上,通过在三维空间快速识别获得最佳电压矢量和无差拍调制的方法,可以实现对零序电流的进一步抑制,得到以下结论:
1)三维空间快速选择最佳电压矢量策略减少了传统模型预测控制计算复杂的问题,选择过程简单直接,有效降低了系统运算负担,同时实现对零序电流的有效抑制;
2)无差拍调制PCC策略通过调制器可以在控制周期结束时准确跟踪给定值,同时与传统模型预测控制相比无需复杂的价值函数计算,减少了硬件的负担,同时实现对零序电流较佳的抑制效果。
猜你喜欢
测控技术(2021年10期)2021-12-21
中学生数理化·高一版(2021年11期)2021-09-05
通信电源技术(2018年3期)2018-06-26
现代防御技术(2016年1期)2016-06-01
设备管理与维修(2016年7期)2016-04-23
通信电源技术(2016年5期)2016-03-22
新高考·高一物理(2016年1期)2016-03-05
电源技术(2015年11期)2015-08-22
电测与仪表(2015年10期)2015-04-09
河南科技(2014年18期)2014-02-27
