
基于H桥驱动的空心杯电机控制研究
2024-01-26 02:32孙耀程方文逸
微特电机 2023年12期
钱 儿, 孙耀程, 方文逸
(中国电子科技集团公司第二十一研究所,上海 200233)
0 引 言
空心杯直流有刷电机以其优异的响应特性,被广泛应用于各类执行机构。这类执行机构一般需要对电机进行转速及转向的控制。直流有刷电机通过给定电压进行转速控制,通过供电正负极性进行转向控制。在实际使用中,多采用H桥结合PWM调制完成对直流有刷电机的转速及转向控制。空心杯电机的特点是没有传统的转子铁心,线圈象杯子一样,完全由导线绕制而成,转子质量大幅降低,具备较小的机械常数及电气常数。为了发挥空心杯电机的优势,可以对H桥结合PWM调制的驱动模式进行比较分析,制定最优的控制方法。
1 H桥控制直流电机方式
H桥控制由4个功率器件组成,以4个N型MOS管为例,其主功率电路如图1所示。其中Q1~Q4为4个N型MOS管,D1~D4为4个续流二极管。
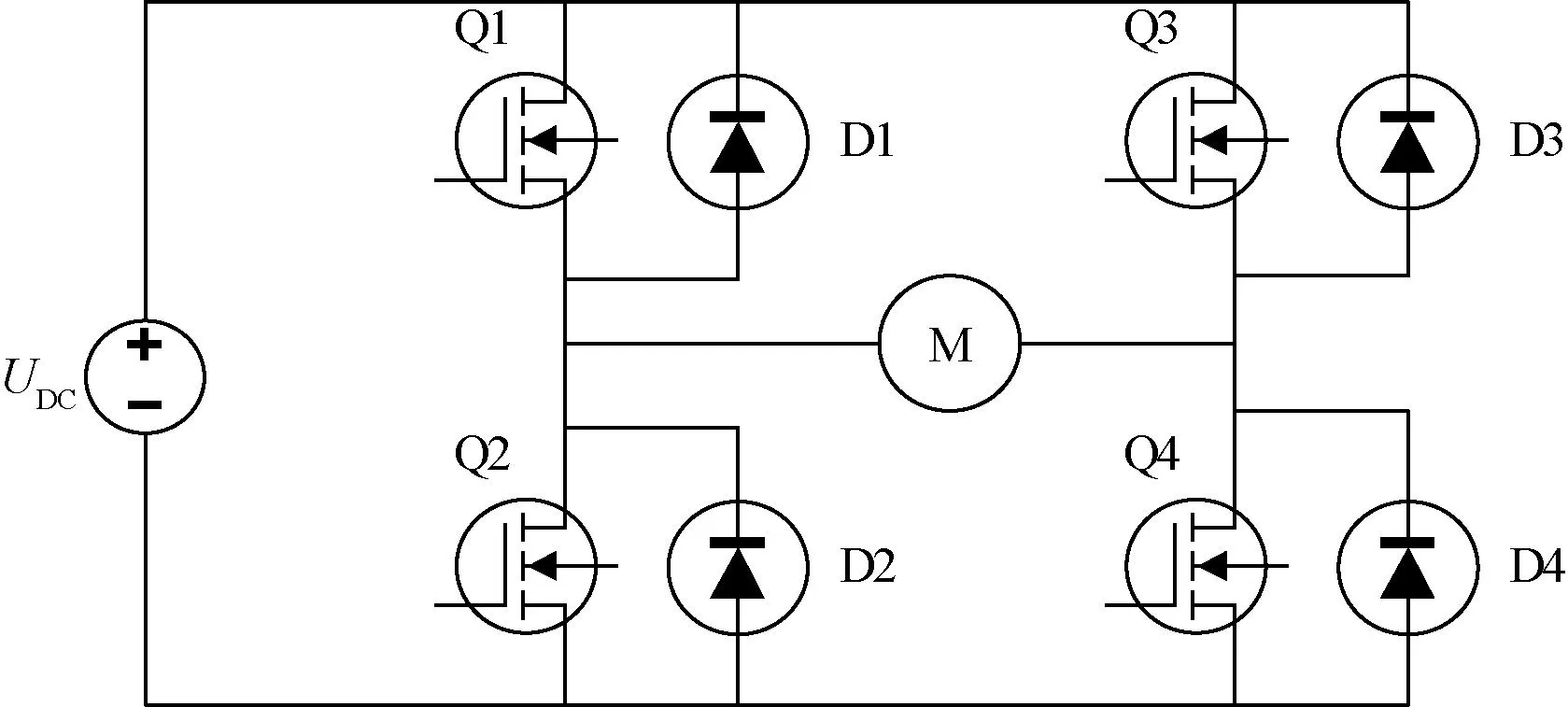
图1 H桥电路结构
当图1中Q1和Q4开通、Q2和Q3关断时,电流方向如图2箭头所示,从电源正极由Q1从左至右穿过电机,然后再经过Q4回来电源负极,在该流向的电流驱动下,电机将沿着正方向转动。
同理可得,当图1中Q1和Q4关断、Q2和Q3开通时,电机反转,电流方向如图3所示。

图2 正向电流示意图
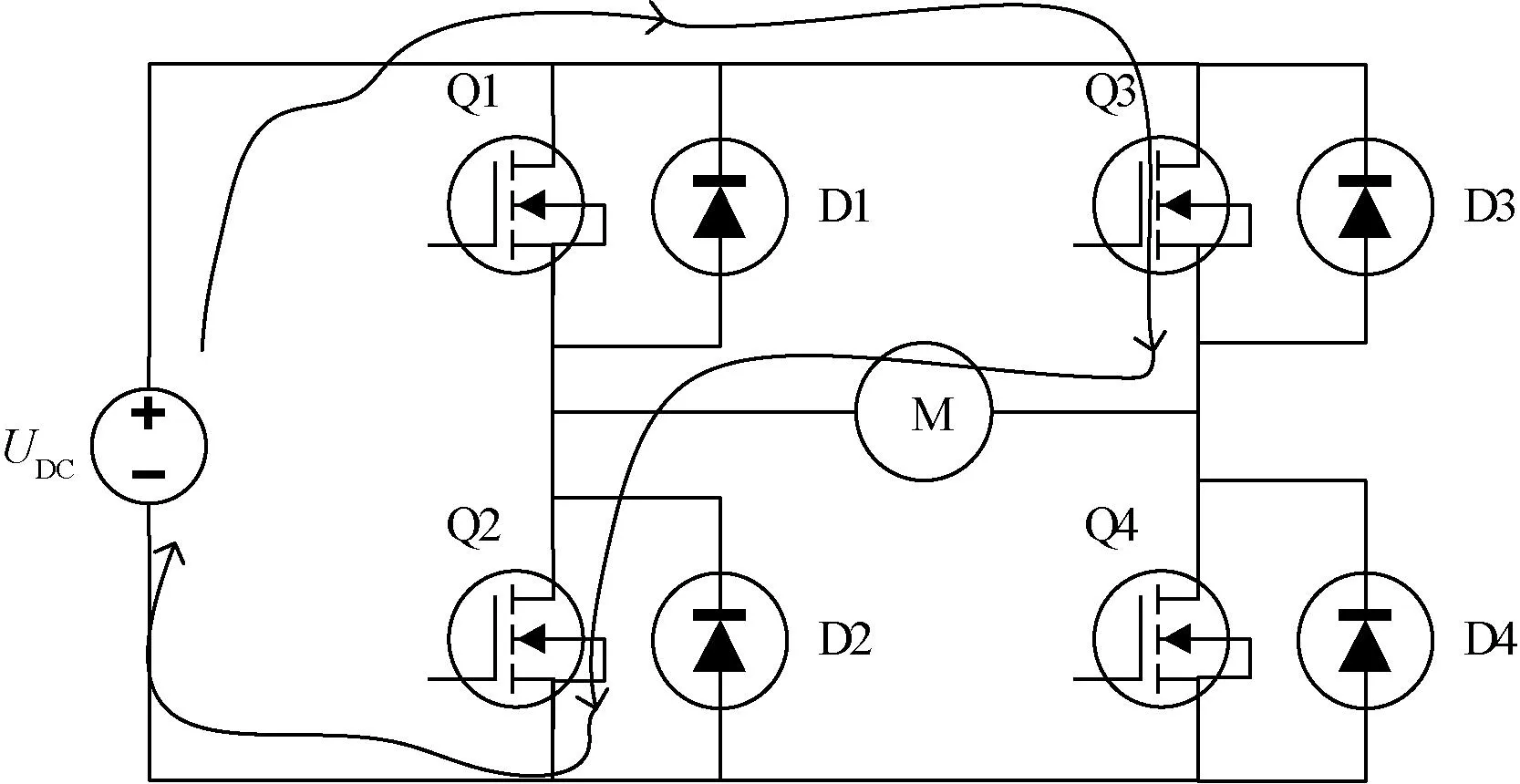
图3 反向电流示意图
在H桥驱动器的设计过程中需要注意两点:第一点是避免两个同侧的MOS管出现同时导通的情况,这种情况会使两个MOS管将电源正极和负极短接,电流直接穿过桥臂,达到最大值,瞬间损坏MOS管和电源;第二点是为了确保H桥两个桥臂的高端MOS管可靠导通,需要设计自举电路来满足MOS管的驱动要求,设计方法可参照相关文献[1-2]。
PWM脉宽调制是电子电力应用中非常重要和常用的一种控制技术,通过伏秒平衡,可以实现脉冲波形对连续参考波形进行等效,完成控制系统对变换器的控制输出。
2 H桥驱动模式分析
通过Q1/Q4 与Q2/Q3 两组MOS管导通逻辑的切换可以控制电机转动,对旋转方向和速度的调节可以通过控制信号的PWM斩波控制来实现。
电机的转速主要通过调节占空比实现,占空比越大,施加在电机电枢上的平均电压就越大,电机的转速越高。实现占空比的PWM载波频率一般设置在5~50 kHz之间。低频率会到导致低转速下噪声较大,而频率过高不仅考验控制芯片的处理能力,也会增加MOS管的开关损耗,降低效率。
根据两个桥臂、四个MOS管不同的PWM触发机制,H桥空心杯直流有刷电机的驱动方式主要有三种控制模式:受限单极模式(PWM-OFF),单极模式(PWM单极互补),双极模式(PWM双极互补)[3-5]。
(1)受限单极模式(PWM-OFF)
如图4所示,当Q2和Q3关断时,Q4常开,Q1工作在PWM模式,电流方向如图4箭头所示,电机将沿着正方向转动。同理,可分析图4的反转逻辑。
这种控制方法在H桥驱动电机正转(或反转)过程中,施加给电机的电压极性是单一的。优点是电路结构和控制逻辑简单明,缺点是电机不能产生反向力矩,不能有效抑制速度静差,调速性能较差。
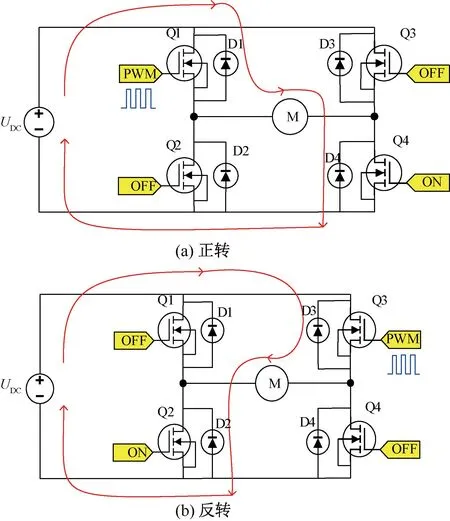
图4 受限单极模式(PWM-OFF)
(2)单极模式(PWM单极互补)
如图5所示,当Q3关断时,Q4常开,Q1工作在PWM模式,Q2也工作在PWM模式,但是开关逻辑和Q1互补,电流方向如图5箭头所示,电机将沿着正方向转动。同理,可分析图5的反转逻辑。
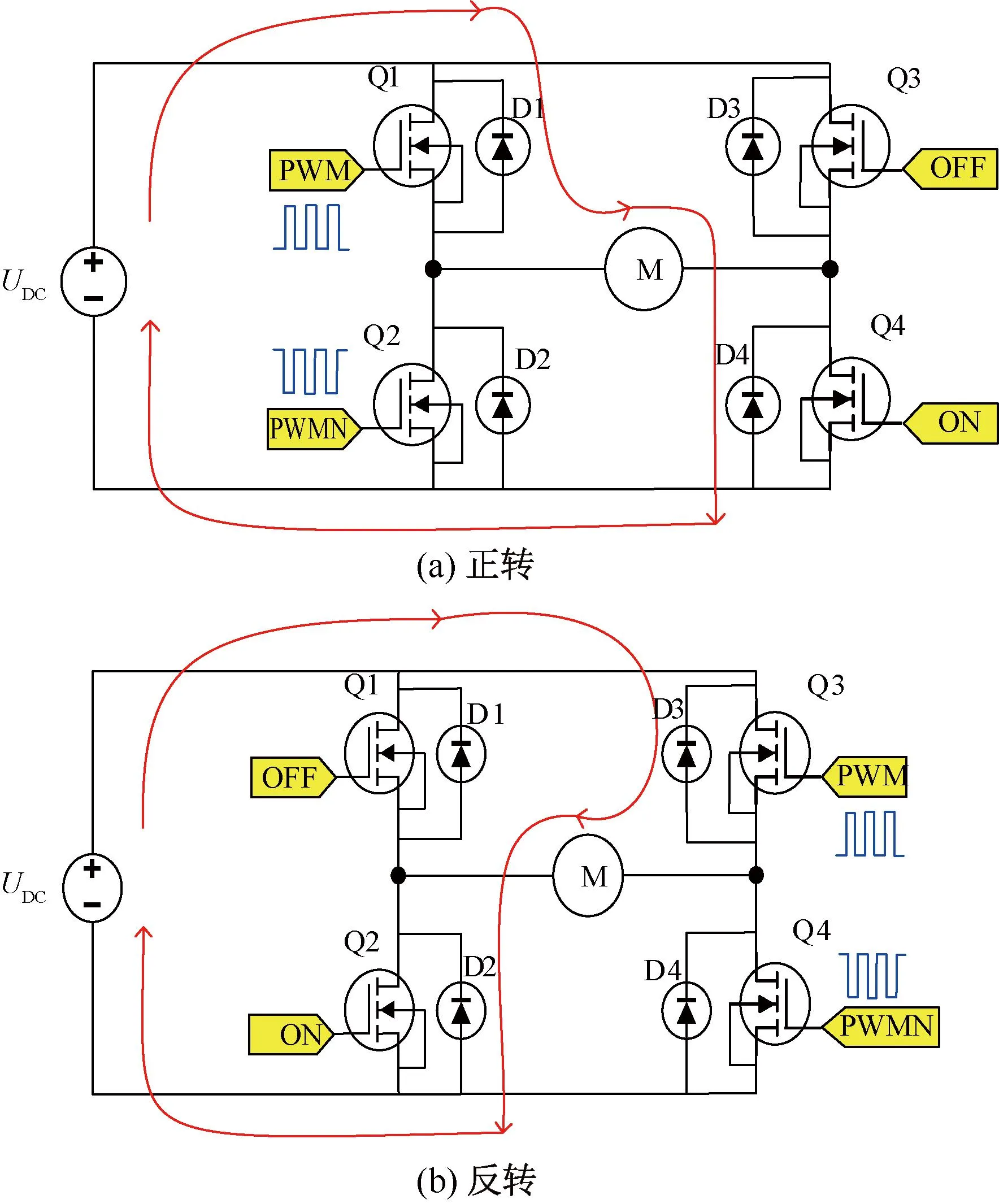
图5 单极模式(PWM单极互补)
这种控制方法不同于上一种驱动模式,该方法在PWM上桥臂关断,下桥臂导通的状态下可以给自举电路的电容进行充电,保证MOS管可靠导通。优点是起动快,工作可靠,占空比调节范围宽泛。缺点是电机刹车过程中,速度接近零速是没有制动力矩或力矩极小,动态性能略逊双极模式。
(3)双极模式(PWM双极互补)
如图6所示,当Q1~Q4均工作在PWM模式,其中,PWM1和PWM1N、PWM2和PWM2N是互补通道,PWM1和PWM2同开关周期,占空比相同,但是极性相反,因此H桥电路拓扑中处于对角线的两个MOS管将同时导通,同时关断。图6箭头所示为电机反转时,为Q1Q4关断、Q2Q3导通状态下的电流方向。
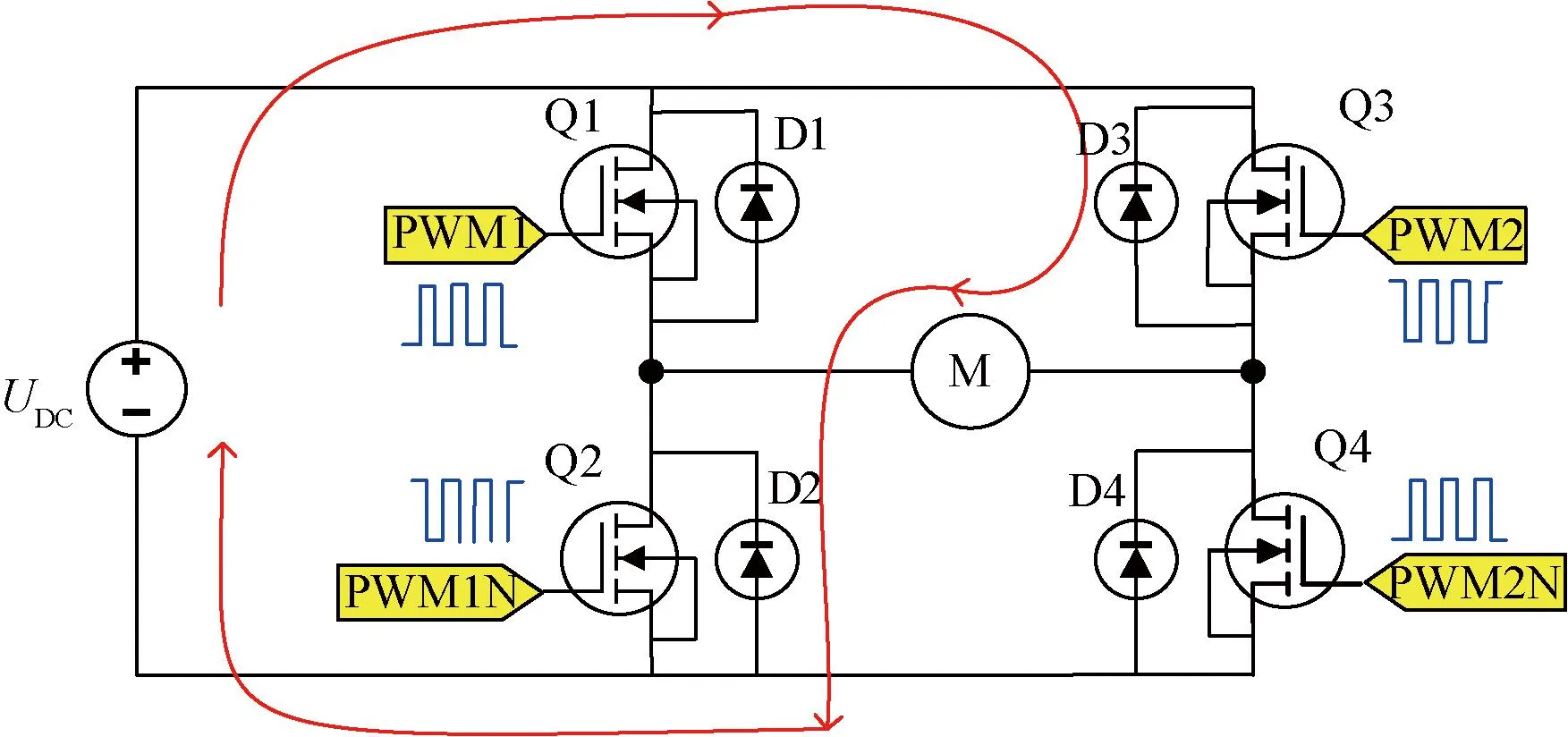
图6 双极模式(PWM双极互补)
不同于前两种控制方式,该方法在H桥驱动电机正转(或反转)的过程中,施加给电机的电压极性是正负交替的,因此可以产生正负转矩,当占空比为50%时,施加给电机的平均电压为0,电机停止;占空比大于50%时,电机正转;占空比小于50%时,电机反转。
该控制方式的优点是动态性能好,调速精度高,调速范围宽,静差小。缺点是控制电路复杂,电路开关损耗大,发热比较严重。
3 计算与分析
如上所述,H桥对直流电机的PWM控制方式有三种,其中受限单极模式和单极模式的控制过程类同,统称为单极模式,区别于双极模式,本文主要对电机零速附近控制过程进行计算分析。在分析之前,作如下假设:驱动链路上的电子器件均为理想器件;PWM 斩波周期远小于电机的时间常数;系统工作在准稳定工作状态,电枢电流ia呈周期性脉动变化;电机转速近似为零。
3.1 单极模式
对应图4和图7,在t1阶段,Q1和Q4导通,电流经电源正极经Q1、电机、Q4回到电源负极。电枢回路方程:
(1)
式中:Ud为电源电压;La为电枢电感;Ra为电枢电阻;Ea为反电动势。
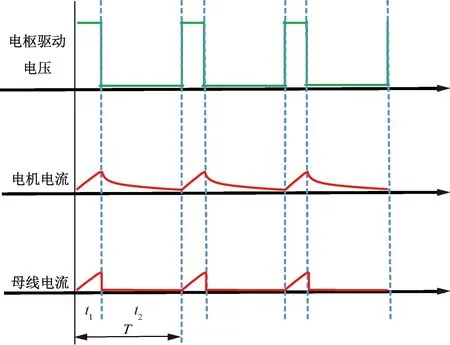
图7 单极模式驱动过程示意图
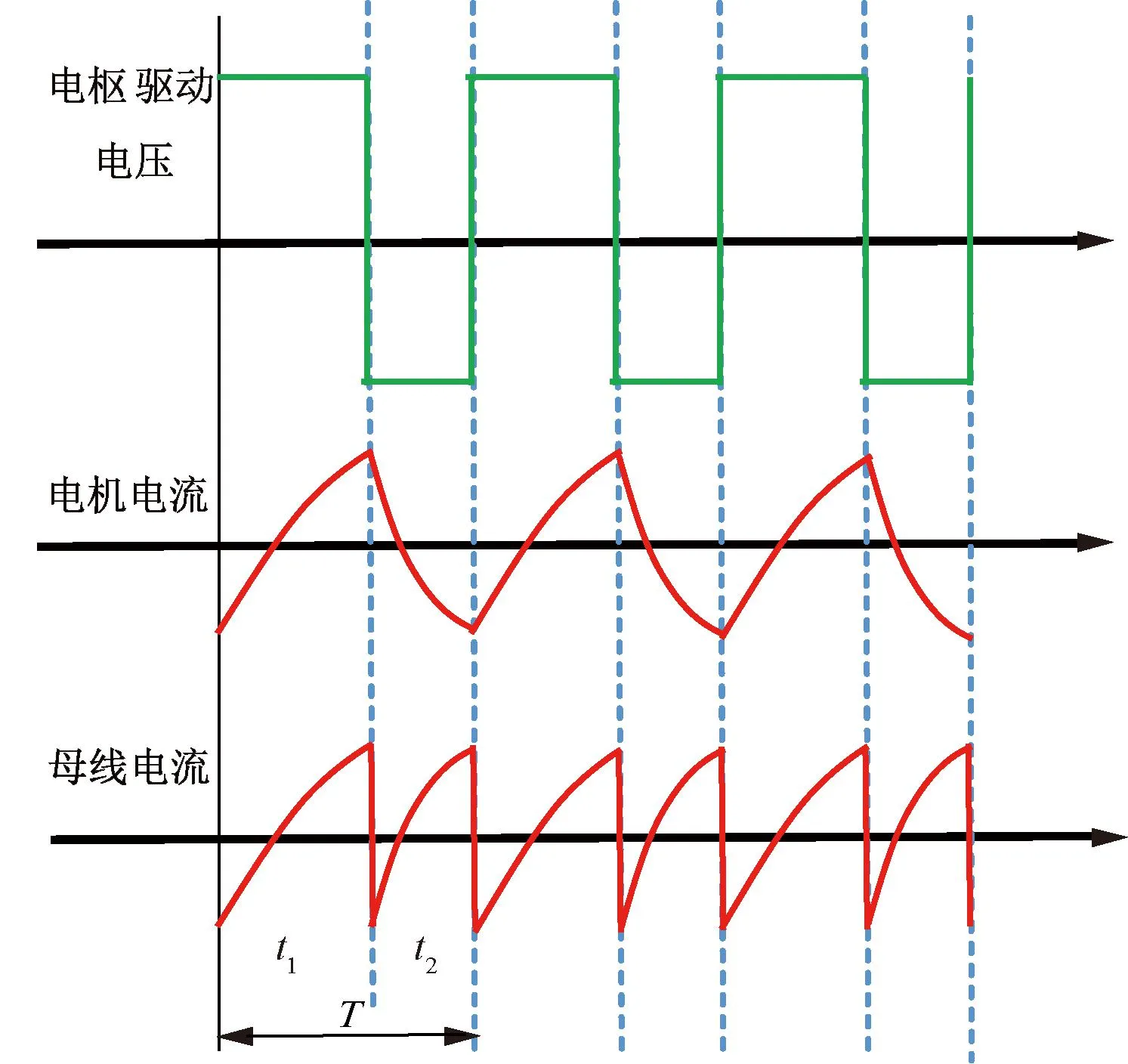
图8 双极模式驱动过程示意图
在t2阶段,电机绕组线圈产生的感应电动势使得Q2的反向二极管D2导通,电流经电机负端经Q4、D2回到电机正端。电枢回路方程:
(2)
3.2 双极模式
对应图6和图8,在t1阶段,Q1和Q4导通,电流经电源正极经Q1、电机、Q4回到电源负极。电枢回路方程为式(1)。
在t2阶段,Q3和Q2导通,电流经电源正极经Q3、电机、Q2回到电源负极。电枢回路方程:
(3)
式中:Ra=0.582 Ω,La=0.191 mH,Ud=50 V,PWM斩波周期为 20 μs。假设零速附近反电动势为零,对式(1)~式(3)进行求解可得:在零速附近,若占空比为5%,单极模式电流ia最大值约为0.26 A ;若占空比为10%,ia最大值约为0.52 A ,ia增大较快,减小过程较为迟缓。双极模式下,低速状态,若占空比为55%,电流ia最大值约1.4 A,最小值约-1.16 A,峰峰值约2.56 A。显然,双极模式下的电流ia峰值较大,且处于快速交变的状态。
4 测试对比
根据空心杯直流有刷电机的驱动控制原理,搭建一套基于全国产化设计的空心杯直流有刷电机驱动器[6-7],以国产高性能小型化嵌入式芯片GD32F103作为主控芯片[8-9],配合国产BUCK电源芯片、国产运放等其他元器件来实现电机控制和接口设计,功率器件采用低导通内阻的国产化MOSFET器件NCEP068N10 G结合FD2203 S预驱来实现电机驱动,导通压降小,可以实现98%的电压输出比例指标。驱动器输入电压为50 V,可以实现最大电流15 A以上的输出,最大功率达到750 W。实验电机选用一台MAXON 公司的空心杯有刷电机,电机电枢电阻为0.582 Ω,电枢电感为0.191 mH。驱动器实物与测试硬件平台如图9所示。
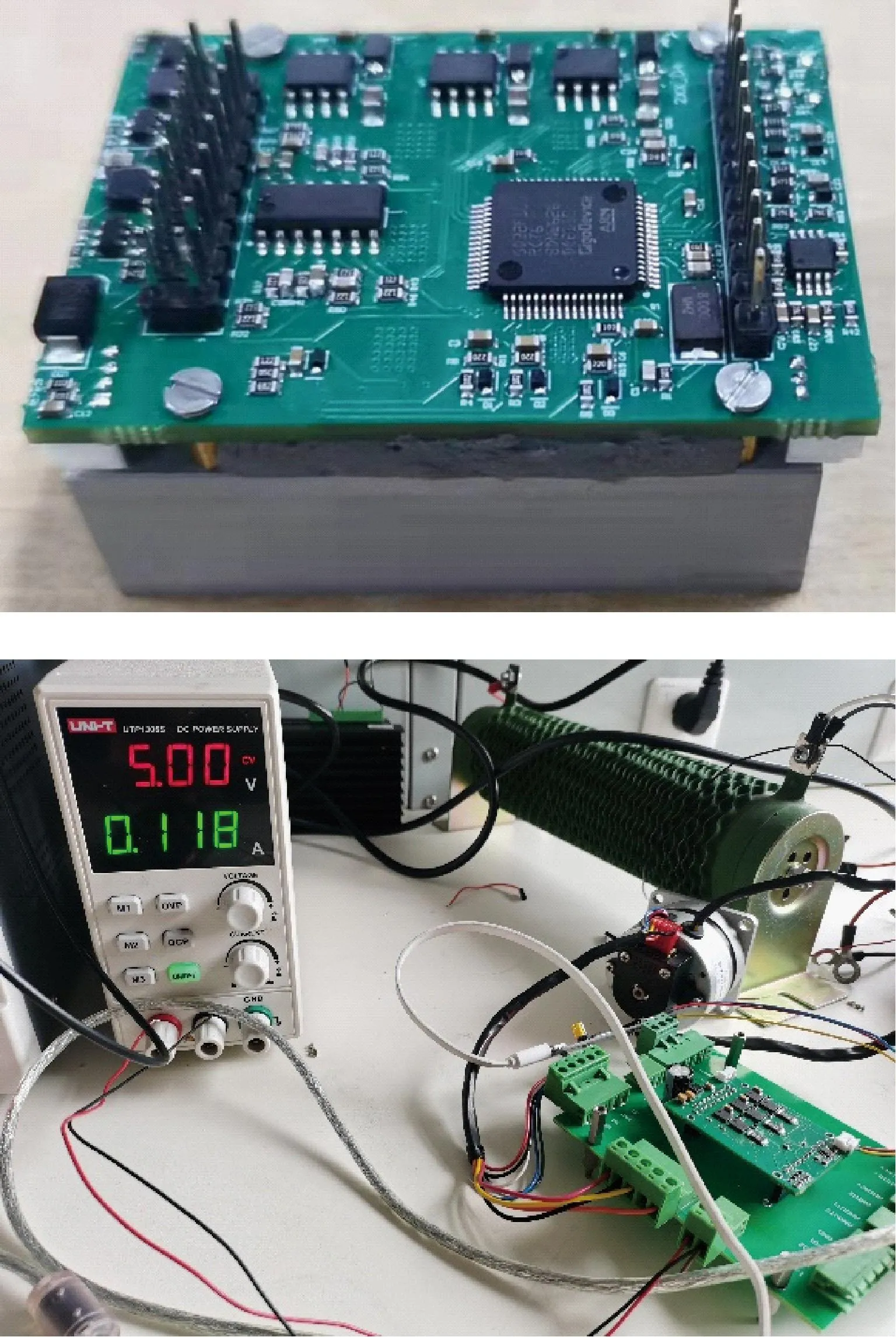
图9 国产化空心杯直流有刷电机驱动器
(1)受限单极模式(PWM-OFF)测试波形
图10为该模式下,10%的占空比信号和电机电枢电流波形。由于空心杯电机电枢电感较小,电机电枢电流增大过程较快,减小过程比较平缓。
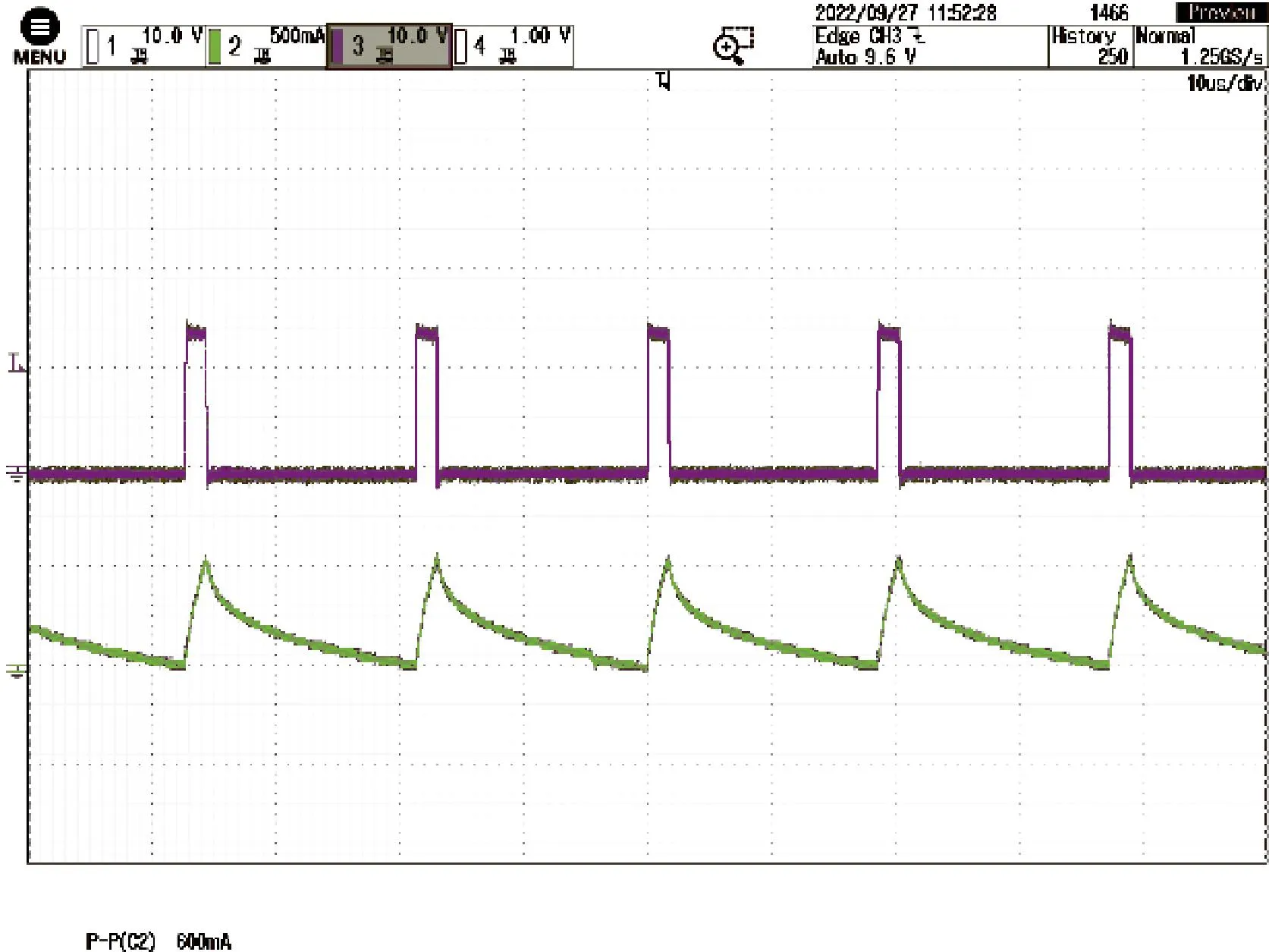
图10 受限单极模式10%占空比信号和电枢电流
图11为95%占空比信号下自举电容电压、电机电枢电流以及MOS管栅极电压的测试波形。显然在占空比达到95%,自举电容没有充电回路的情况下,自举电压会快速降低,无法持续保持驱动能力。

图11 受限单极模式95%占空比自举电容电压和电流
(2)单极模式(PWM单极互补)测试波形
在单极模式(PWM单极互补)模式下,10%占空比信号和电枢电流的波形如图12所示。与受限单极模式波形相同。图13为95%的占空比信号下,PWM信号与自举电容电压波形。在占空比达到95%的情况下,自举电容电压仍然保持稳定,满足驱动MOS管要求的水平,H桥可按照占空比信号向电机施加电压,产生连续的电枢电流。

图12 PWM单极互补模式10%占空比信号和电枢电流
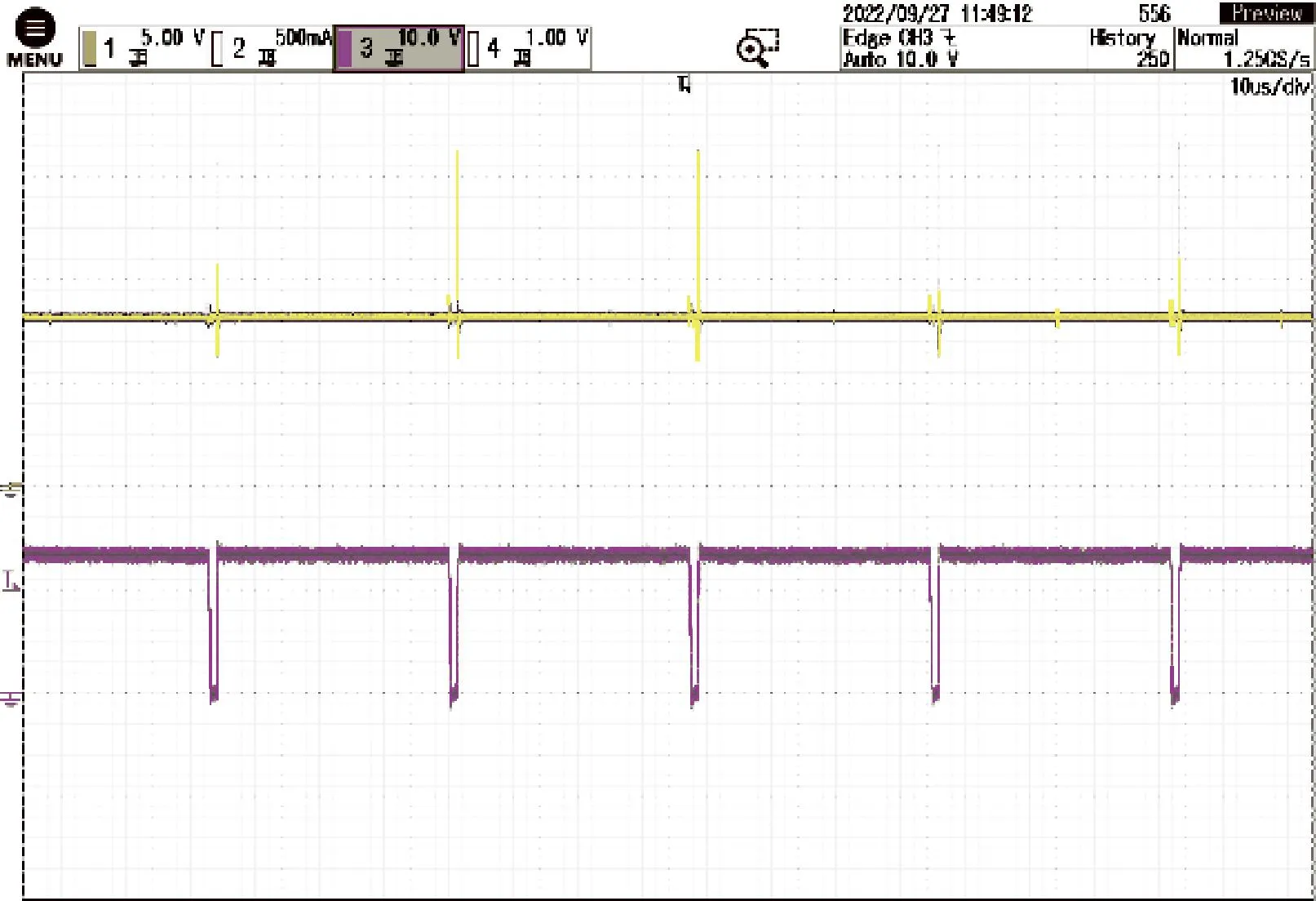
图13 PWM单极互补模式95%占空比信号和自举电容电压
(3)双极模式(PWM双极互补)测试波形
图14为双极模式下的占空比信号和电机电枢电流波形。占空比信号模拟电机起动与低速的工作状态,为55%的正向和45%反向。显然,电流波形波动较大,该模式下,由于空心杯电机电枢电感较小的特殊电气特性,使得控制过程中电枢电流的增降幅度较大,且快速交变,这样会导致电机转矩脉动大且稳定性较差,起动与低速噪声大,因此该控制方式并不适用于空心杯电机的H桥驱动控制。
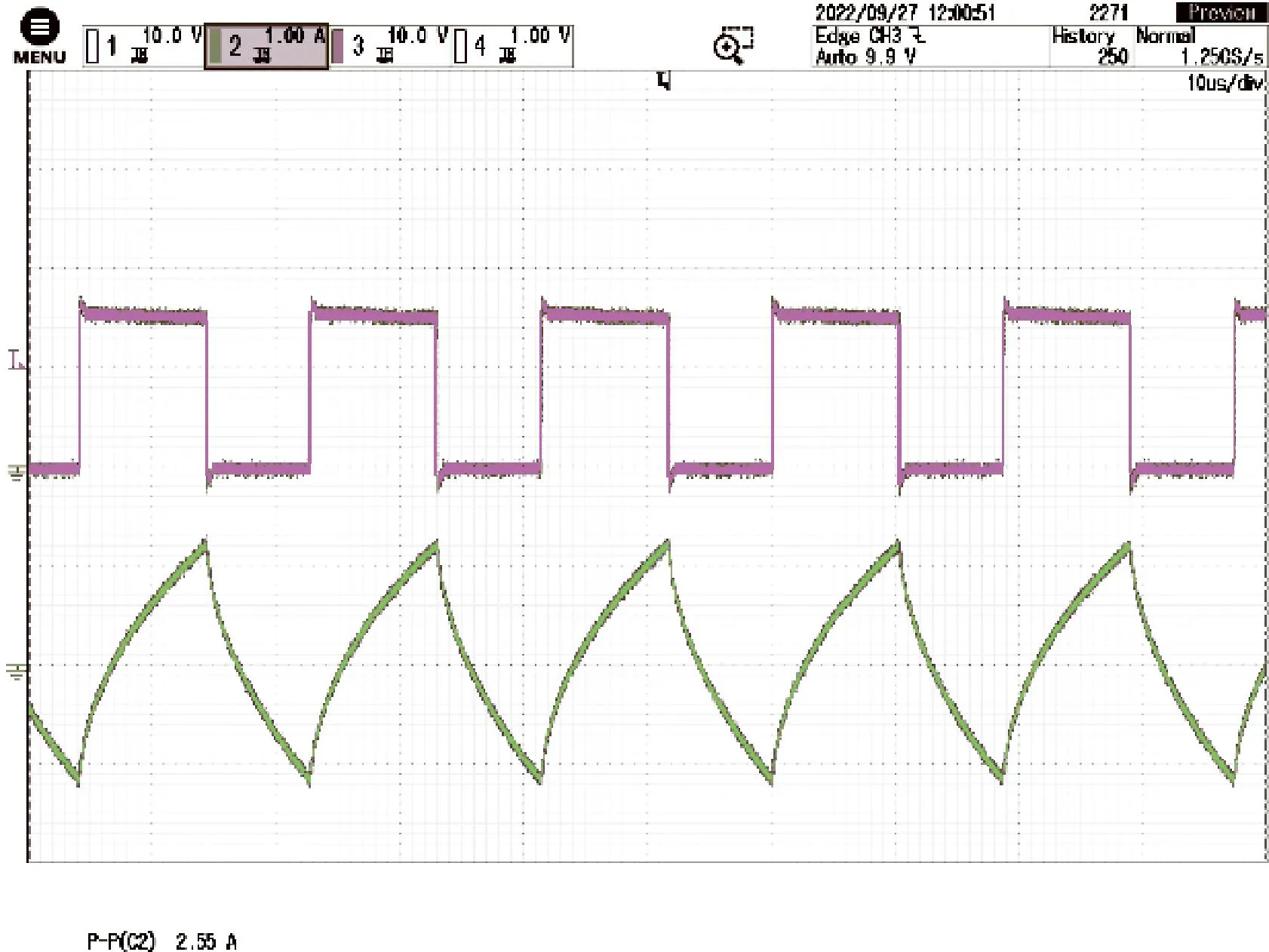
图14 PWM双极互补模式占空比信号和电枢电流
5 结 语
本文介绍了H桥常用的三种控制方式,结合空心杯电机特殊的电气性能,对三种控制方式下空心杯电机的低速控制过程进行分析,设计全国产化的硬件平台的空心杯电机驱动器,并通过实验对比三种不同模式下H桥驱动空心杯电机的驱动效果,经过对比分析,确定单边PWM调试方式是最适用于的空心杯电机控制的驱动方式。
猜你喜欢
云南师范大学学报(自然科学版)(2022年4期)2022-07-28
火力与指挥控制(2022年5期)2022-07-25
弹箭与制导学报(2020年1期)2020-07-09
弹箭与制导学报(2019年6期)2019-06-24
军事文摘·科学少年(2017年2期)2017-04-26
实用临床医学(2016年8期)2016-06-08
中国医疗器械信息(2015年10期)2015-04-13
中国医药科学(2015年2期)2015-02-27
现代检验医学杂志(2015年5期)2015-02-06
物理与工程(2014年5期)2014-02-27
