测风激光雷达在青岛低能见度天气下的适用性
2024-01-29 10:38时晓曚陈清峰李昱薇
应用气象学报 2024年1期
鄢 珅 时晓曚 傅 刚 陈清峰 李昱薇
1)(青岛市黄岛区气象局, 青岛 266400) 2)(青岛市气象局, 青岛 266003) 3)(中国海洋大学海洋与大气学院, 青岛 266100) 4)(山东省气象台, 济南 250031)
引 言
风是气象学研究最重要的参数之一,低空风场的垂直分布不仅对天气预报业务具有重大意义,同时也是评估风电场风能资源的关键要素[1]。常规近地层风廓线主要观测手段为测风塔,其具有较高的稳定性和可靠性,但在复杂地形下布设成本较高[1-2]。因此,随着科技水平的不断提高其他大气风场探测手段应运而生[3-5]。
激光雷达是结合传统雷达技术、光学激光技术和信息处理技术于一体的新型光学遥感手段,多普勒相干测风激光雷达是利用激光为探测物质,将大气中的气溶胶粒子作为探测目标,以相干检测作为鉴频手段的一种遥测大气风场信息的主动探测设备[6]。测风激光雷达通常由激光发射系统、光学接收系统和信号采集处理系统组成,发射系统向大气发射的激光在大气中与气溶胶等粒子相互作用,携带多普勒频移信息进入光学接收系统与本振光进行拍频,平衡探测器接收拍频后的信号,由信号采集处理系统完成信号转换和径向风速反演[7]。近年测风激光雷达凭借其测量精度高、分辨率高、响应速度快等特点发展迅速,被广泛应用于各领域[8-10]。
对测风激光雷达探测能力的评估研究主要通过与其他风场监测手段对比,初步验证其在低空采集数据的可靠性[11-14]。受激光性能的局限,天气现象对雷达测风性能必定产生影响。范琪等[15]对比晴天、阴天、雾/霾天和雨天4种天气类型下测风激光雷达和风廓线雷达与探空气球风场探测的相关性,发现测风激光雷达探测精度按晴、阴、雾/霾天依次降低,雨天风场探测受降水影响衰减严重。陈泉等[16]关注降雨强度对于激光雷达探测垂直风速精度的影响,发现其垂直风速误差随着降雨强度的增大而变大。张志坚等[17]研究不同天气条件下激光雷达的最大探测高度、数据获取率,发现雨天和雾天条件对测风雷达垂直探测影响最大。史文浩等[18]研究测风激光雷达在台风影响下的适用性和观测精度,认为测风激光雷达对于台风边界层风场探测的数据具有较高可信度。赵文凯等[19]计算晴天、阴天和雨天测风激光雷达和探空气球风场数据的相关系数和平均偏差,发现不良天气会对其探测性能造成较大影响,其中雨天影响最大。
测风激光雷达雨天风场探测受降水影响衰减严重,低能见度的雾、霾天气也影响其探测能力。能见度作为一种气象光学视程,是常规气象观测项目之一,低能见度天气会对高速公路、轮渡、民航等交通出行产生重要影响[20]。雾和霾是两种最为常见的低能见度天气现象,雾是由于空气中悬浮着的大量水滴或冰晶微粒使水平能见度降低的天气现象[21],霾则是由于均匀浮游在空中大量极细微的干尘粒等使水平能见度降低的空气普遍浑浊现象[22],两者虽均为视程障碍物,但所含的水汽和气溶胶粒子相差甚大,因此对测风激光雷达探测能力的影响也存在差异。我国沿海地区和海上具有丰富的风能,是开发利用风能资源的重点区域,青岛位于我国黄海西部沿岸,黄海是我国近海海雾发生最频繁的海域[23],低能见度天气发生频繁,且与内陆地区相比存在差异。因此,针对青岛地区测风激光雷达在低能见度天气下的探测性能开展对比分析,既能够完善测风激光雷达在复杂条件下的探测性能研究,又能够为低能见度天气下黄海海上风场观测业务提供参考。本文利用2021年4月—2022年12月测风激光雷达观测数据,以L波段探空系统风场数据为参考,分析测风激光雷达在不同能见度和相对湿度条件下的探测能力,重点关注雾天和霾天的探测能力,以期为后续测风激光雷达的相关技术研究和业务应用提供参考。
1 数据和方法
1.1 多普勒测风激光雷达
本文使用的多普勒测风激光雷达置于青岛国家基本气象站观测场内,能够在大气边界层内对三维风场等参数进行连续探测,其激光波长为1.5 μm,径向风速测量精度为0.1 m·s-1,径向数据更新率约为1 s,径向探测距离与大气状态相关,原则上可达45~6000 m。本文选用多普勒波束扫描模式,可在较短时间内完成扫描,通过获取东、南、西、北4个方位角的径向风速数据反演风廓线,在气流不稳定的情况下也适用[14]。
1.2 L波段雷达探测系统
探空数据是探空仪跟随探空气球升空直接测量大气状态的数据,是目前准确度相对较高的大气探测数据[24]。L波段雷达探测系统通过雷达跟踪探空气球实现测风,L波段雷达在地面发出询问信号,探空气球携带无线电回答器在高空发回回答信号,根据雷达测定探空气球离探空站的距离、方位角、仰角和时间等信息,计算探空气球的移动速度和方向,从而得到不同高度的水平风场信息[25]。根据L波段探空系统的探测原理可知其受干扰程度较小,因此常作为其他遥感设备的参考标准,对其他观测数据进行评估校准[26]。青岛国家基本气象站每日01:15(北京时,下同)、07:15和19:15施放3次探空气球,根据2021年4月—2022年12月每日施放探空气球的时刻,挑选测风激光雷达不同高度的水平风速和风向数据,共筛选出1768次有效对比观测,在剔除缺测数据及异常值点后,对其水平风速和水平风向观测数据进行20 m等间隔高度的线性插值,确保二者在时间和空间上的统一。
1.3 风速与风向误差对比方法
对水平风速、风向进行适用性分析检验时,采用测风激光雷达与L波段探空之间的绝对误差(以下简称误差)、均方根误差和相关系数对比。考虑到风向观测范围为0°~360°,0°和360°附近的风向数据会产生虚假误差,为确保获取测风激光雷达合理的风向误差,对两种风向数据进行如下处理[27-28]:
当WLi(i)-WLr(i)>180°,WLr(i)=WLr(i)+360°;当WLi(i)-WLr(i)<-180°,WLi(i)=WLi(i)+360°。其中,WLi(i)和WLr(i)分别为测风激光雷达和L波段探空观测得到的第i组水平风向对比数据。
2 低能见度条件下测风激光雷达探测能力
图1为0~30000 m和0~2000 m能见度条件下测风激光雷达最大探测高度的分布概率以及平均最大探测高度变化曲线。由图1可知,当能见度低于1000 m时,测风激光雷达最大探测高度几乎全部低于200 m,平均最大探测高度在能见度低于950 m时低于200 m,但在能见度为950~1000 m时增至800 m左右的高度。当能见度为1000~2000 m时,最大探测高度高于200 m 的概率明显增加,平均最大探测高度在400~1000 m波动增长。当能见度为2000~4000 m时,最大探测高度低于200 m的概率逐步降低,同时最大探测高度在600~1400 m的概率逐步增加,平均最大探测高度则在800~1200 m波动增长。当能见度高于4000 m时,最大探测高度的概率高值区稳定在800 m以上,低于200 m的概率进一步降低,平均最大探测高度稳定在约1200 m。值得注意的是,能见度为7000~10000 m时,最大探测高度在1200~1400 m高度上仍存在概率大值区,当能见度高于10000 m时,最大探测高度达到1000 m以上的概率反而明显减小,概率大值区对应的高度呈微弱下降趋势,稳定在约1200 m高度。

图1 0~30000 m(a)和0~2000 m(b)能见度条件下测风激光雷达最大探测高度分布概率(填色)和平均最大探测高度变化曲线(黑色实线)
图2为水平风速和水平风向均方根误差随能见度变化。水平风速和风向的均方根误差在能见度小于1000 m时出现高值,尤其是水平风速的均方根误差在能见度小于1000 m时大部分位于约1.5 m·s-1,随着能见度增加,稳定在1.5 m·s-1以下,在1.2 m·s-1上下波动。水平风向均方根误差整体随能见度变化的差异较小,整体在25°上下波动。
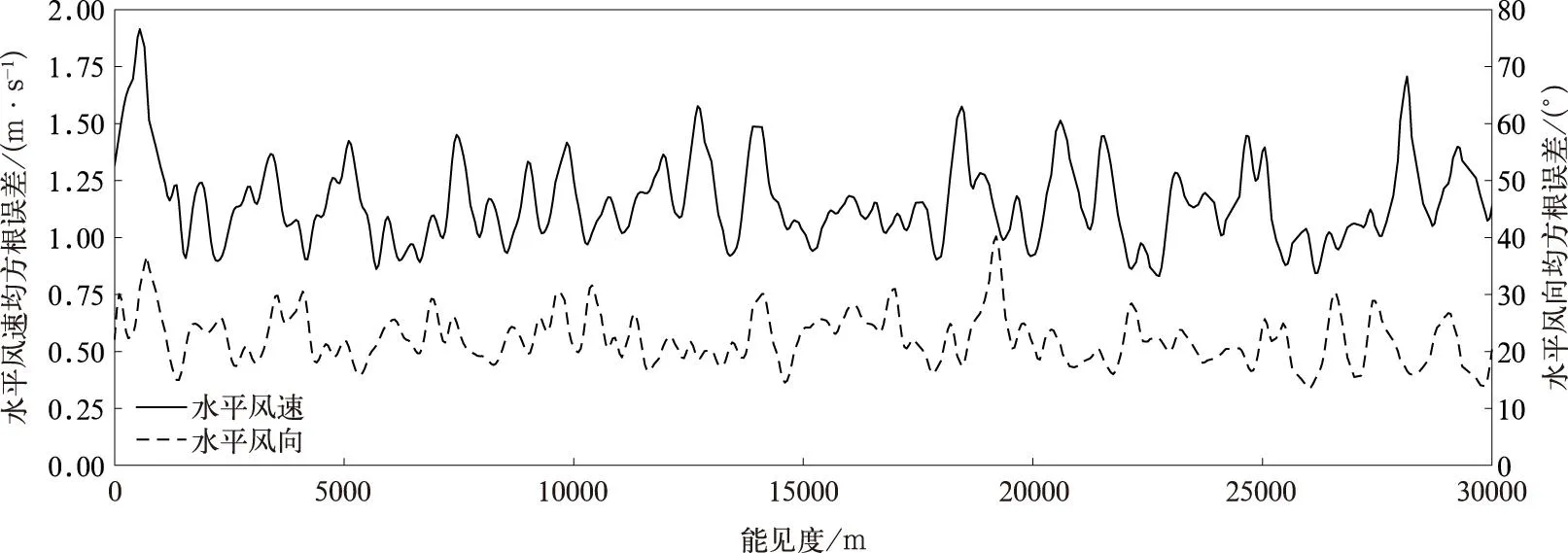
图2 不同能见度条件下测风激光雷达水平风速和风向均方根误差变化
雾和霾是造成大气低能见度的主要天气现象,两者均为视程障碍物,但形成条件差异很大,常将造成视程恶化时空气相对湿度的大小作为区分雾和霾的辅助判定条件[29-31],水汽含量差异对激光产生的衰减作用不同[32],同时霾天气溶胶粒子含量的增加又有利于测风激光雷达精度的提高[33],测风激光雷达的探测能力受影响程度有差异,因此筛选出能见度小于10000 m的低能见度天气,引入相对湿度参数进一步分析测风激光雷达在低能见度天气下探测高度和精度的差异。图3和图4分别为能见度小于10000 m的低能见度天气下,测风激光雷达的最大探测高度和水平风速、风向均方根误差随相对湿度的变化。由图3可知,当相对湿度低于30%时,平均最大探测高度可达1800 m,且绝大部分探测时刻能达到1000 m以上高度。随着相对湿度的增大,探测高度整体维持在约1200~1400 m高度,当相对湿度接近90%时,平均最大探测高度出现明显下降趋势,当相对湿度大于95%时,绝大部分探测高度低于400 m,当相对湿度达100%时,平均最大探测高度下降至300 m以下。当相对湿度低于45%时,水平风速、风向均方根误差最小,分别保持在约0.5 m·s-1和12°。随着相对湿度增加,风向均方根误差未出现明显变化,整体在15°~30°间波动。风速均方根误差在相对湿度低于90%时围绕1.0 m·s-1波动,当相对湿度增加到90%~95%时,均方根误差增至1.5 m·s-1,当相对湿度达到100%时,均方根误差最大可达2.0 m·s-1。
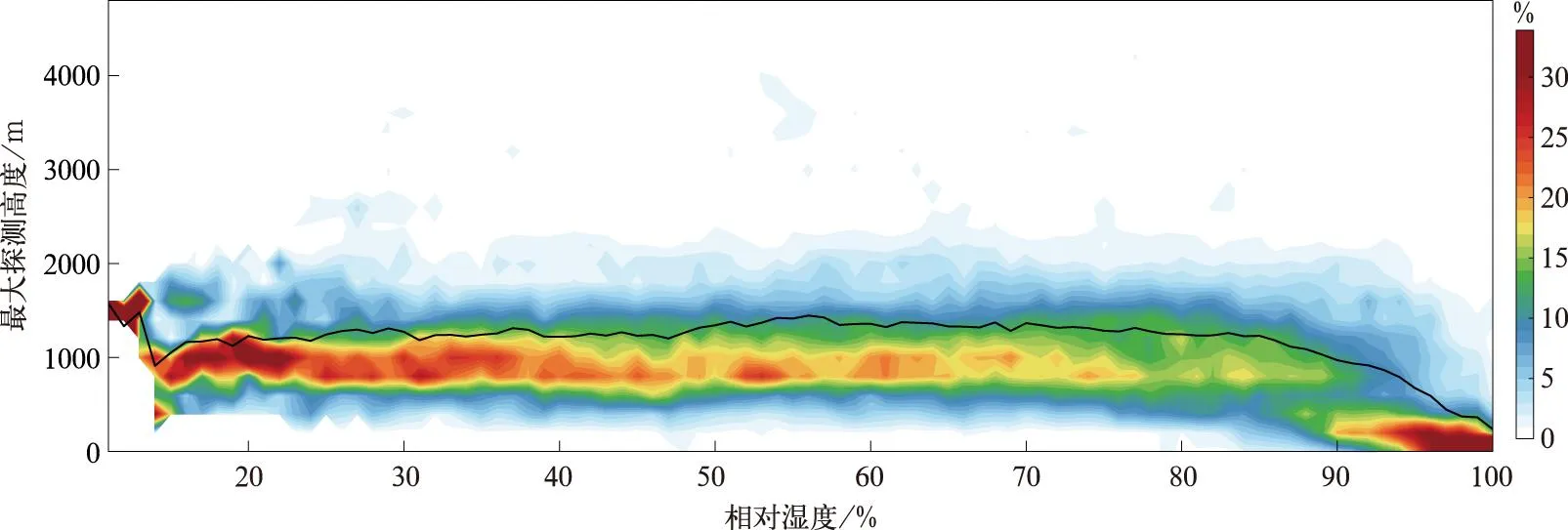
图3 低能见度天气下测风激光雷达最大探测高度分布概率(填色)和平均最大探测高度(黑色实线)随相对湿度变化
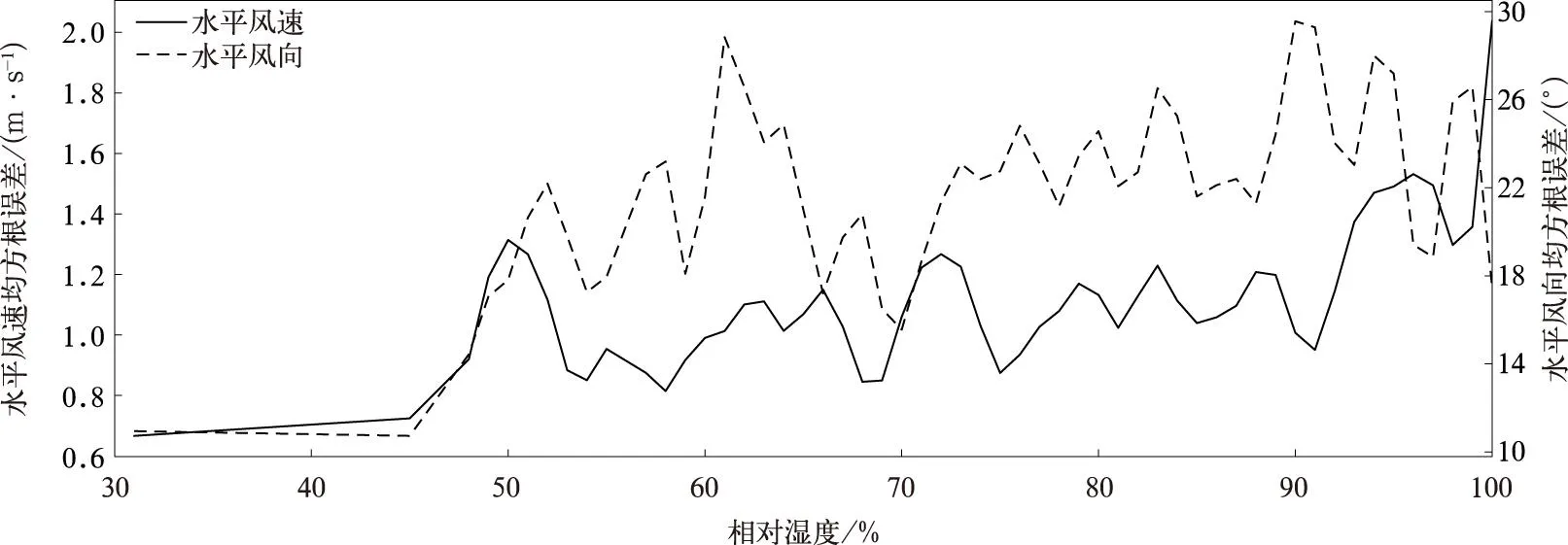
图4 低能见度天气下测风激光雷达水平风速和风向均方根误差随相对湿度变化
3 低能见度天气下测风激光雷达的适用性
以上分析可以看到,当能见度小于1000 m时,测风激光雷达的探测高度和精度明显下降,当能见度为1000~10000 m时,其探测高度和精度随相对湿度的变化存在较大差异,当相对湿度大于90%时探测高度下降,精度则在相对湿度大于95%时有所下降。为定量探究测风激光雷达在低能见度天气下的适用性,按照上述能见度和相对湿度的变化临界点,将低能见度天气细化为4种情形:情形1,能见度低于1000 m,相应时刻的相对湿度均大于95%(符合雾天判别标准);情形2,能见度为1000~10000 m,相对湿度为95%~100%;情形3,能见度为1000~10000 m,相对湿度为90%~95%;情形4,能见度为1000~10000 m,相对湿度小于90%(符合霾天判别标准)。
图5和图6为不同情形下水平风速、风向的线性拟合分布,图7为对应的水平风速、风向误差和均方根误差分布。由图5~图7可知,在能见度小于1000 m的雾天,即情形1,大气能见度的降低主要是空气中水汽含量的增加所导致,雾天对激光有严重衰减作用,此时激光测风雷达风速、风向的相关性最差,风速相关系数为0.91(达到0.001显著性水平,下同),风向相关系数为0.94,同时误差的分布也大于其他3种情形,风速误差为-2~4 m·s-1,均方根误差为1.4 m·s-1,风向误差在-20°~120°,均方根误差高达42.7°。
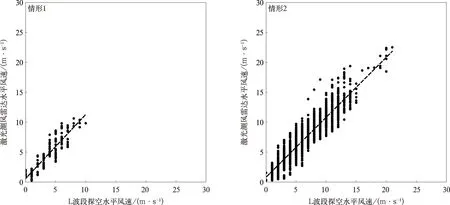
图5 不同情形下水平风速散点及线性拟合分布
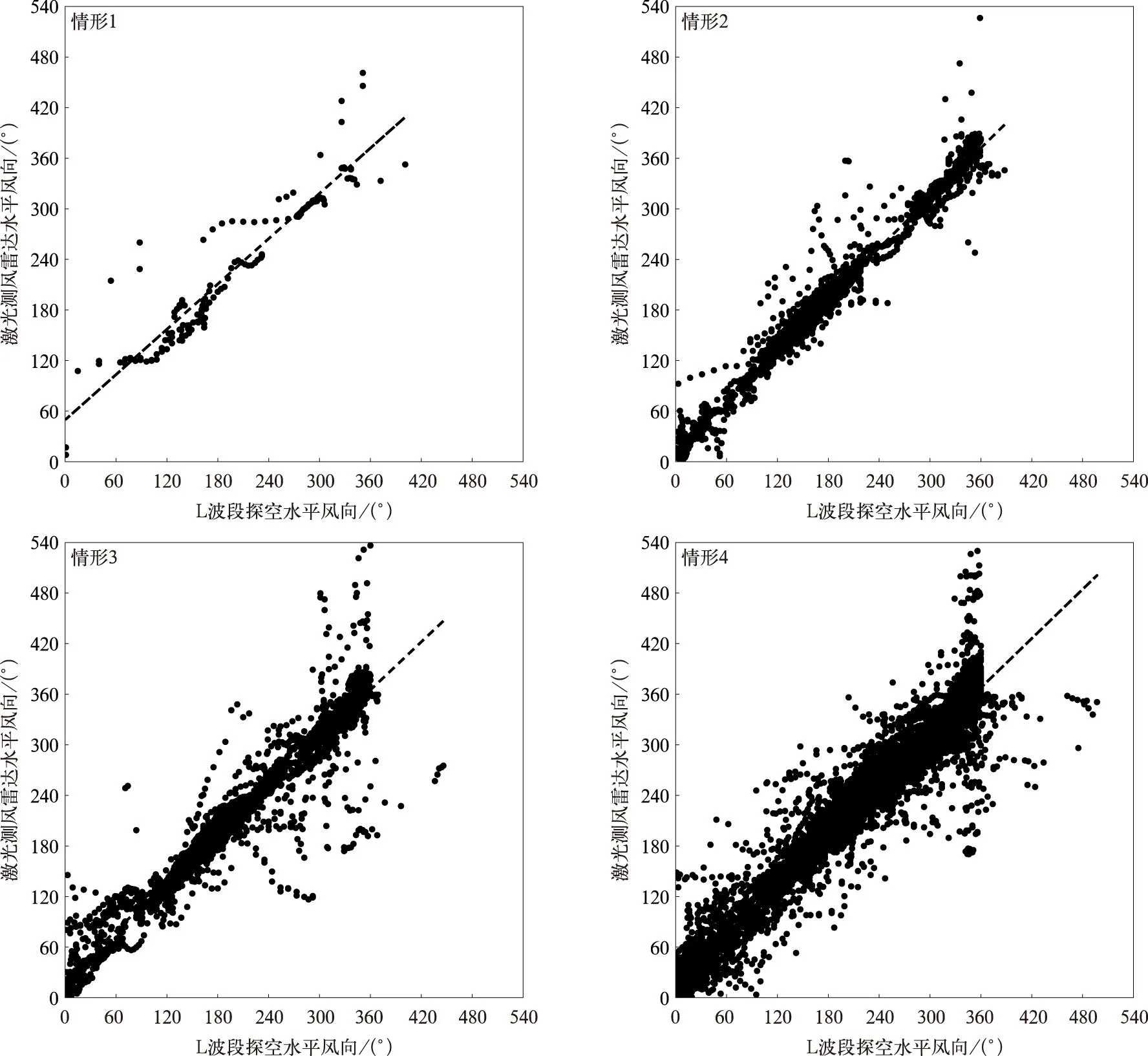
图6 不同情形下水平风向散点及线性拟合分布

图7 不同情形下测风激光雷达水平风速和风向误差的概率密度分布
当能见度为1000~10000 m时,测风激光雷达的探测能力随大气水汽含量的变化存在差异。在相对湿度小于90%的霾天,即情形4,大气中水汽含量较低,此时能见度的降低主要是大气中气溶胶粒子含量的增加所致,风速、风向与L波段探空系统的相关系数分别高达0.97和0.98,误差分布较为集中,风速误差对应的最大概率点接近于0,均方根误差为1.1 m·s-1,风向误差最大概率点接近于10°,均方根误差为22.3°。随着相对湿度的增大,风速相关系数有所降低,均方根误差有所增大,而风向相关系数和均方根误差均变化不大。当相对湿度为90%~95%时,即情形3,风速相关系数为0.96,均方根误差为1.2 m·s-1,风向相关系数为0.96,均方根误差为28.0°。当相对湿度大于95%时,即情形2,风速相关系数降低至0.94,均方根误差增大至1.5 m·s-1,风向依旧保持较高精度,相关系数和均方根误差分别为0.98和21.7°。
参考吴兑[34]建议的以90%为相对湿度阈值,再结合《雾的预报等级》和《霾的观测和预报等级》相关规定,将相对湿度不小于90%且水平能见度小于1000 m的时刻定义为雾时刻(即情形1),将相对湿度小于90%且水平能见度小于10000 m的时刻定义为霾时刻(即情形4),并根据上述定义将连续时间不小于 30 min的雾和霾过程进行筛选,进一步验证测风激光雷达在青岛地区雾天和霾天探测能力随高度的变化。图8和图9为测风激光雷达与L波段探空在雾、霾天气下不同风力和风向的比例分布,其中风速按业务上常用的蒲福风级进行风力分级,风向则按照八分位法划分。由于雾过程次数明显低于霾过程,再加上有雾发生时测风激光雷达的探测距离和探测精度严重衰弱,因此雾过程整体样本很少且均在750 m高度以下。雾天二者虽均以小于3级的偏南风为主,但风力和风向的比例分布存在差异。霾天二者在2000 m高度以下的高度不同风力比例分布十分相似,超过6级风(13.8 m·s-1)的比例较小,较大风力的比例随探测高度的升高而增大。由于最大探测高度超过2000 m的时刻较少,2000 m高度以上的样本数同样较少,二者比例分布出现差异。不同风向的比例分布则在1750 m 高度以下十分接近,且霾天偏北风向概率远大于偏南风向,2000 m以上高度时,几乎全部为西风和西北风。
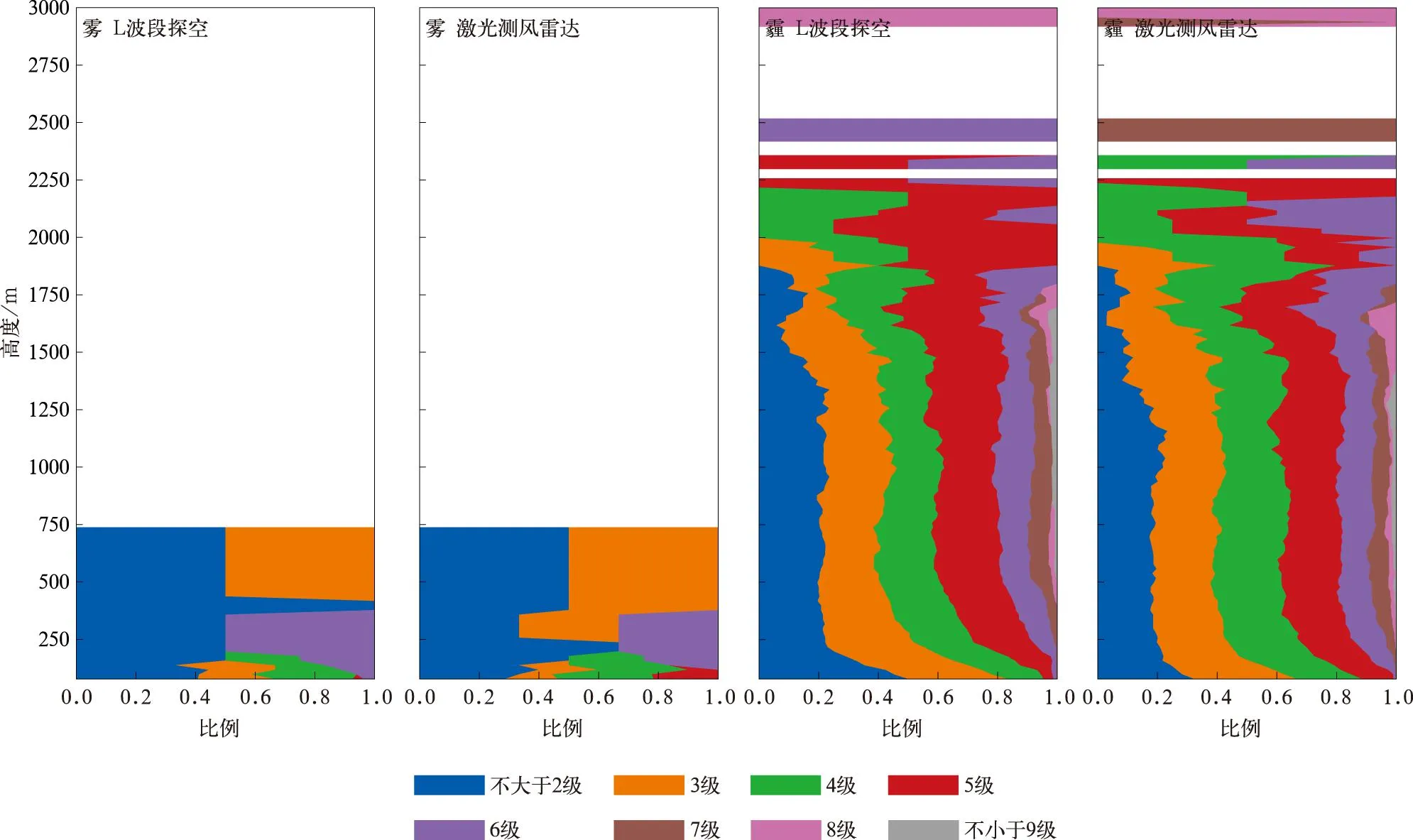
图8 雾、霾天气下各高度层水平风速比例分布
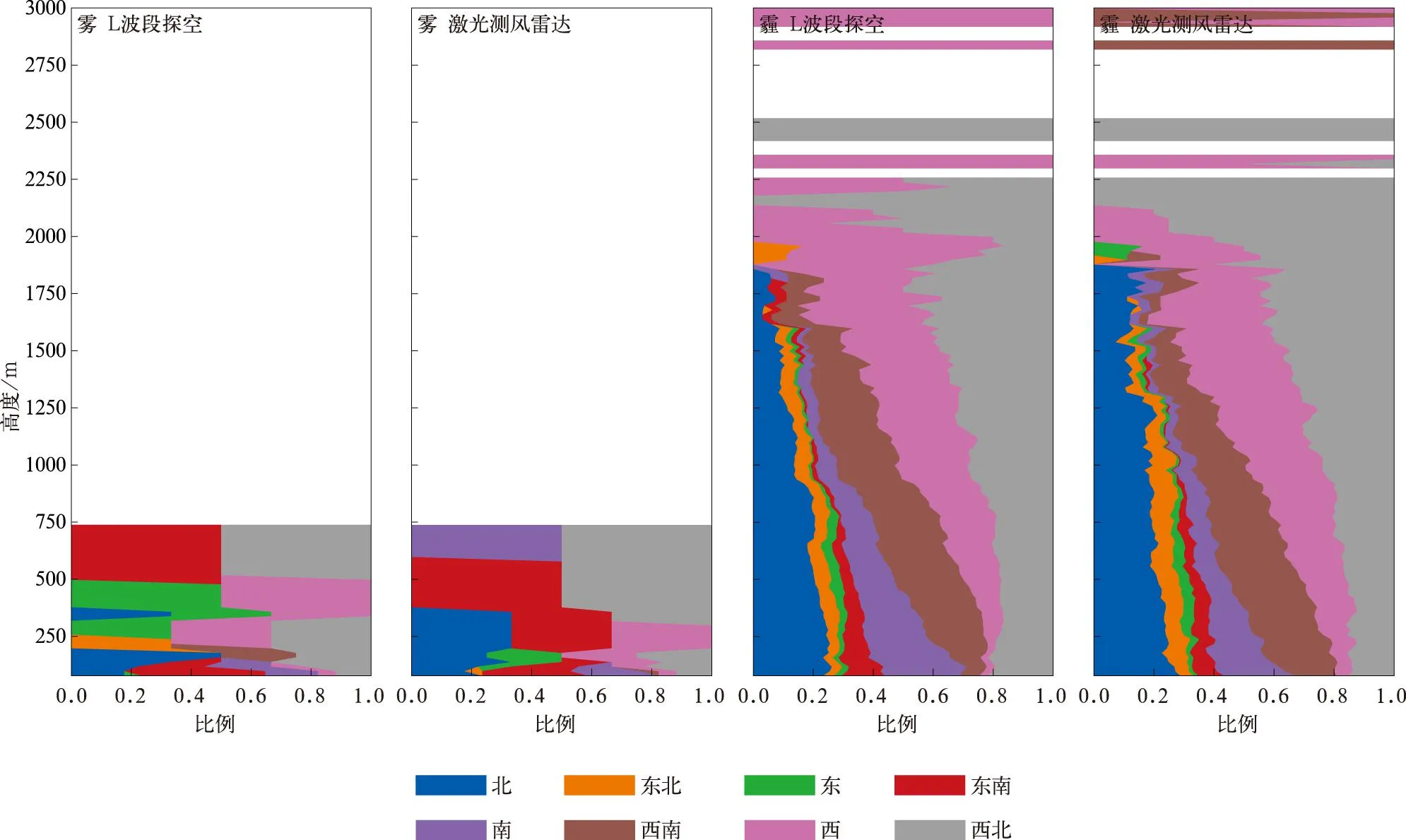
图9 雾、霾天气下各高度层水平风向比例分布
4 小 结
本文以L波段探空系统的风场观测为参考标准,从最大探测高度、水平风速和风向3个方面对放置于青岛国家基本气象站观测场内的多普勒测风激光雷达在2021年4月—2022年12月低能见度天气下的探测高度和精度进行适用性分析,主要结论如下:
1) 在能见度大于10000 m的非降水天气,测风激光雷达的平均最大探测高度稳定在约1200 m,水平风速均方根误差在1.2 m·s-1上下波动,水平风向均方根误差在25°上下波动。当能见度条件降低至10000 m以下时,测风激光雷达的探测高度和精度因不同能见度和相对湿度受干扰程度存在差异。
2) 当能见度小于1000 m时,大气能见度的降低是空气中水汽含量增加所致,对应时刻的相对湿度全部大于95%,严重干扰了激光在大气中的传输,平均最大探测高度降低至400 m以下,水平风速相关系数约为0.91,均方根误差约为1.4 m·s-1,水平风向相关系数约为0.94,均方根误差约为42.7°。
3) 当能见度为1000~10000 m时,测风激光雷达的探测能力随大气水汽含量的变化存在差异。在相对湿度小于90%的霾天,大气能见度的降低主要是气溶胶粒子含量的增加所致,其平均最大探测高度稳定在1200 m以上,水平风速相关系数高达0.97,均方根误差约为1.1 m·s-1,风向相关系数高达0.98,均方根误差约为22.3°,与高能见度天气的探测能力相当,在极低湿度条件下其探测高度和精度甚至略优于高能见度天气。
4) 随着相对湿度的增大,水汽对激光传输的衰减作用对测风激光雷达的探测高度和精度产生不同程度的影响。在相对湿度为90%~95%时,探测高度出现明显下降趋势,平均最大探测高度下降至1000 m以下,探测高度在400 m以下的概率逐渐增大,但风速和风向精度受干扰程度较小,风速相关系数为0.96,均方根误差为1.2 m·s-1,风向相关系数为0.96,均方根误差为28.0°。
5) 在相对湿度大于95%时,平均最大探测高度降低至400 m以下,风速精度开始下降,相关系数降低至0.94,均方根误差增大至1.5 m·s-1,风向精度变化较小,相关系数为0.98,均方根误差为21.7°。
综合以上结果,多普勒测风激光雷达在青岛地区具有良好的适用性,尤其是在湿度较低的霾天。但在低能见度天气下,相对湿度大于90%时,其探测高度下降;相对湿度高于95%时,其探测精度有所降低,尤其是在能见度小于1000 m的雾天,需谨慎使用其风速和风向数据。
猜你喜欢
学苑创造·C版(2023年5期)2023-06-04
中学生数理化·七年级数学人教版(2023年3期)2023-03-21
自动化学报(2017年2期)2017-04-04
高原山地气象研究(2016年1期)2016-11-10
中国交通信息化(2016年6期)2016-06-06
中学生数理化·七年级数学人教版(2016年2期)2016-05-30
海洋气象学报(2016年3期)2016-02-28
气象研究与应用(2016年4期)2016-02-27
新高考·高二数学(2014年7期)2014-09-18