基于多层显著性模型的SAR图像舰船目标检测
2024-01-30 14:39胡绍海刘帅奇
系统工程与电子技术 2024年2期
扈 琪, 胡绍海, 刘帅奇
(1. 河北大学电子信息工程学院, 河北 保定 071002;2. 北京交通大学信息科学研究所, 北京 100044;3. 现代信息科学与网络技术北京市重点实验室, 北京 100044)
0 引 言
合成孔径雷达(synthetic aperture radar,SAR)是一种能够全天候、全天时产生高分辨率遥感图像的相干成像系统,因此受到世界各国普遍重视,在军事及民用舰船检测中发挥着重要的作用[1-4]。SAR图像舰船检测可以有效提高舰船运输效率和减少海上交通事故,同时也是海洋监视的重要组成部分。由于海面杂波的不确定性、舰船目标大小不一以及陆地杂波的干扰等,舰船目标的检测性能会受到很大的影响。因此SAR图像舰船检测依然是一项重要且具有挑战性的研究任务[5-9]。
在SAR图像目标检测中,最常用的算法是恒虚警率(constant false alarm rate, CFAR)算法。CFAR算法在均匀背景中可以提供具有恒定的虚警概率的检测阈值,较好地避免背景噪声、杂波和干扰变化的影响。随着CFAR算法的不断改进,形成了基于高斯分布、对数正态、Gamma[10]、Beta分布[11]等统计分布的CFAR检测方法。这些方法对于某类特定场景能够产生较好的检测效果,但这些方法需要人为分析目标与背景的特性,并且参数设计复杂,缺乏普适性,在复杂环境中难以达到令人满意的检测效果。
近年来,各国学者根据人类视觉注意系统从复杂场景中检测目标的特点,提出了许多优秀的计算视觉注意模型来模拟人类视觉系统的结构。文献[12]提出了一种基于生物启发的视觉注意模型,该模型通过中心-周围对比度来测量图像的显著性。该模型独立于图像的统计特性,计算简单。为了利用图像的全局信息,文献[13]从谱域的角度出发提出了一种基于傅里叶变换与谱残差方法的显著性检测算法。该算法基于频域计算处理,采用快速傅里叶变换实现,计算简单和快速。考虑到感兴趣目标的先验信息,文献[14]提出了一种基于全局区域对比度的显著性检测算法。该算法生成了高质量的显著性图,能够均匀地突出整个目标区域。然而,在计算一个区域的显著值时,该方法需要将该区域与整个图像中的所有其他区域进行比较,计算复杂度很高。
虽然现有的基于显著性的舰船检测方法相比传统方法有更好的检测效果,但仍有一些问题需要进一步解决。首先,大多数检测器仅对于背景单一、目标突出的图像具有良好的检测效果,对含有斑点噪声或杂乱背景的图像的目标检测不具有鲁棒性,甚至可能增加误报率;第二,显著性图可以表示感兴趣的区域,但对于目标位置的估计过于粗略,通常不能为目标定位提供精确的轮廓信息,因此仅仅依靠显著性图来推断精确的舰船目标区域是不够的。
为了解决这些问题,本文提出了一种新的多层显著性检测算法,该算法同时考虑了图像的全局信息和局部特征,能够有效地去除虚警,实现精确的舰船目标检测。本文首先对图像进行非下采样剪切波变换(non-subsampled shearlet transform, NSST),并利用频谱残差法和边缘检测算子快速获得图像的显著性图。其次,根据该显著性图提取感兴趣区域(region of interest, ROI),并仅对ROI去除虚警,从而大幅减轻计算负担。最后,本算法利用基于CFAR的活动轮廓模型(active contour model, ACM)实现动态背景建模,从每个提取的ROI中估计出舰船轮廓,进一步实现舰船目标的检测。本文所提出的舰船检测方案遵循分层的虚警消除模式,通过显著性驱动的区域级和轮廓级滤波逐步选择舰船目标。另外,在实际SAR图像上的实验结果也证实了它在不同分辨率、不同尺度下可有效地对强度不均匀的图像中的舰船进行精确检测。
1 相关工作
1.1 显著性检测
在人类视觉注意机制的启发下,一些研究者开始研究更为智能的舰船目标检测的生物学模型。由于舰船是广阔的近海区域中的突出物体,人眼可以毫不费力地关注这些区域,因此很多学者开发出具有生物启发的目标区域自动选择计算模型,例如:根据舰船在水域而非陆地的先验知识,文献[15]提出了一种基于视觉注意模型的SAR图像舰船检测方法,以提高舰船检测性能。文献[16]采用脉冲余弦变换模型,在关注的候选区域阶段选择舰船,在光学卫星图像上具有更好的检测精度和召回率。文献[17]提出了一种基于模式递推的显著性检测器,用于非均匀SAR背景下的目标检测,该检测器对斑点噪声和地表纹理具有较强的鲁棒性。
从谱域的角度出发,文献[13]提出了一种基于图像频域的视觉显著区域提取方法,即频谱残差(spectral residual, SR)法。与其他模型相比,SR法是一种全局显著性区域提取算法。该算法基于频域计算处理,采用快速傅里叶变换实现,具有计算简单和快速的优点。文献[18]使用拉普拉斯金字塔对图像进行多尺度描述,结合SR法实现了显著性特征的快速提取。受其启发,本文采用非下采样剪切波模型代替拉普拉斯金字塔模型,充分发挥NSST变换的稀疏表示能力及多尺度空间分析能力,然后结合SR法快速获得图像的显著性区域,得到高质量、高分辨率的显著性图。
1.2 活动轮廓模型
自从活动轮廓模型被提出以来,其在图像分割和图像检测等任务中得到了广泛的应用[19]。文献[20]提出了一种基于局部图像拟合能量驱动的主动轮廓模型。通过提取局部图像信息,可以对强度不均匀的图像进行分割。文献[21]提出了基于局部区域的Chan-Vese模型。该模型可以分割出强度不均匀的图像,并且计算成本较低,但它对初始轮廓很敏感。文献[22]提出了一种基于局部直方图拟合能量驱动的非参数主动轮廓模型。该模型定义了两个拟合直方图来局部逼近目标和背景的分布,可以对分布不易确定的区域进行分割。但是,由于需要计算每个灰度值的直方图分布,因此计算量很大。
可以看出,基于局部信息拟合能量的主动轮廓模型可以有效地分割出强度不均匀的图像。然而,不合适的初始轮廓会导致错误的分割。此外,这些模型的分割成本普遍较高。因此,文献[23]提出了一种基于局部预拟合(local pre-fitting, LPF)能量驱动的主动轮廓模型,该模型对初始值具有较强的鲁棒性,且计算量小。为了将LPF模型更好地应用于SAR图像中,并且考虑到雷达目标的杂波环境,本文将LPF与CFAR结合,提出了一种基于动态CFAR的活动轮廓显著性模型(LPF-CFAR),逐步滤除虚警,从而精准地获得了舰船目标的轮廓结构。
2 本文算法
通常情况下,SAR图像中目标的灰度值要高于其临近区域的背景像素点的灰度值,因此舰船目标潜在区域一般都包含在所得到的显著区域内,但仅仅依靠显著性检测不能得到舰船精确的轮廓特征。因此,本文结合全局显著性检测和局部活动轮廓提取,提出了一种新的分层舰船目标检测算法。首先利用SR法检测出SAR图像的显著性区域,然后通过二值化和形态学滤波提取图像的ROI切片,最后利用改进的活动轮廓模型从ROI切片中获取精确的舰船轮廓。本文所提出的舰船检测方案的总体框架如图1所示。接下来,本文对算法的每一部分进行介绍。

图1 本文提出的SAR图像舰船目标检测算法框架Fig.1 Framework of proposed ship detection algorithm in SAR image
2.1 频谱显著性检测
在对未知场景进行分析时,计算机无法预先知道图像中物体的尺度。因此,需要同时考虑图像在多尺度下的描述,并进一步获知感兴趣物体的最佳尺度。为此,可以将图像构建为一系列不同尺度的图像集,在不同的尺度中检测感兴趣的特征。NSST是Shearlet变换的扩展,使用非下采样拉普拉斯塔式滤波器组对图像进行多尺度分解,分解后的图像大小与源图像相同;然后采用剪切波滤波器组对得到的各尺度子带图像进行多方向变换,从而得到不同尺度、方向的子带图像。在图像的分解和重构过程中,由于没有对图像进行下采样和上采样操作,使得NSST不仅具有良好的频域局部化特性、多方向性以及接近最优的稀疏表示能力,还具有平移不变性。
利用NSST对图像进行处理,能够将图像分解为低频和高频部分,其中低频部分在图像显著目标检测中属于重要信息,而高频部分属于冗余信息。为了充分利用NSST的尺度间特性,保留细节特征,本文利用文献[13]中的SR法对NSST分解的不同尺度的低频系数进行显著性区域提取,然后将不同尺度的显著图进行融合,得到最终显著图。该方法的流程图如图2所示。
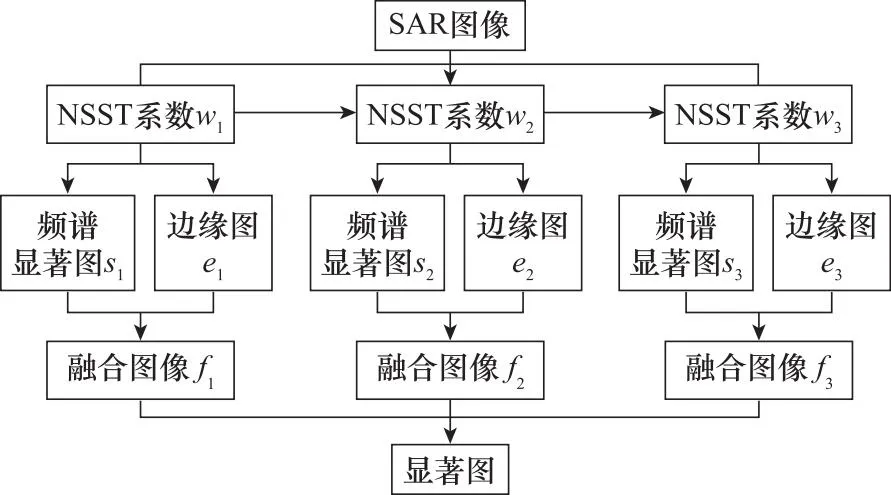
图2 基于NSST的显著性检测结构Fig.2 Structure of saliency detection based on NSST
本文对原图像进行3次NSST分解,每次分解的低频系数分别设为w1,w2,w3,然后分别对w1,w2,w3进行SR计算和罗伯特边缘检测,得到频谱显著图s1,s2,s3和边缘图e1,e2,e3,最后通过加权合成得到最终显著图。
通过SR法得到的显著图直接影响后续目标轮廓检测的质量。假设I(x)为一幅图像,图像频谱通过快速傅里叶变换(fast Fourier transform, FFT)将[I(x)]分解为幅度谱A(f)和相位谱P(f)两部分:
A(f)=Amp{FFT[I(x)]}
(1)
P(f)=Pha{FFT[I(x)]}
(2)
通过一个低通滤波器与图像的对数幅度谱进行卷积,将该幅度谱平滑处理,与原图像的对数幅度谱作差求出SR。结合所得的SR和相位谱,求取原图像的视觉显著图。SR的计算过程为
L(f)=ln[A(f)]
(3)
R(f)=L(f)-hn(f)L(f)
(4)
S(x)=g(x)*FFT-1[exp(R(f)+iP(f))]2
(5)
式中:FFT和FFT-1表示图像的傅里叶变换及其逆变换;hn(f)表示频域的低通滤波器,如均值滤波器。g(x)表示空域的低通滤波器,可采用一个高斯平滑滤波器;A(f)、P(f)、L(f)分别是原始图像的幅度谱、相位谱及对数幅度谱;R(f)表示SR;S(x)为显著图。
2.2 基于CFAR的活动轮廓显著性模型
在得到显著图后,对显著图直接进行分割,然后提取显著目标区域作为检测结果,是舰船目标定位的一种直接方法。目前大多数基于显著图的舰船检测方法都采用这种策略。然而,这个简单的操作有以下两个缺点。一方面,这种硬阈值策略要求显著性映射具有较高质量和包含清晰的目标轮廓,而这在实践中很难保证。显著图通常是以一种模糊的方式来显示一个位置吸引关注的可能性有多大,而且其中几乎没有清晰的物体轮廓信息。此外,杂波环境下复杂的雷达后向散射特性使得高信噪比显著图的生成变得更加困难。另一方面,最终的检测性能与检测阈值的选择密切相关,而检测阈值通常是根据经验设定的,在多种场景下缺乏自适应性。而寻找合适的方法来确定最佳分割阈值仍然是一个具有挑战性的问题。因此,本文通过寻找一种软目标分割策略对舰船轮廓进行检测。
在高分辨率SAR图像中,舰船目标的形状和结构更为复杂,轮廓线是舰船所在位置的重要标志。受此启发,本文尝试利用轮廓显著性来定位舰船目标区域。考虑到在前一节中得到的显著图,本文首先使用Otsu算法自动选取阈值对图像进行二值化,再通过形态学滤波填补空洞和消除孤立点。然后寻找当前显著图上每个目标的最小外接矩形,对应到原始SAR图像,即可提取出原始场景中所有包含目标的切片。值得注意的是,后续基于CFAR的活动轮廓检测需要ROI切片包含目标和一定的背景,因此在提取ROI切片时将最小外接矩形框向外扩展50个像素。最终,舰船目标的搜索区域就从整个场景转换到每个提取的候选区域。然后,利用基于CFAR的活动轮廓显著性检测器对每个候选区域进行目标检测。
文献[23]提出的基于局部预拟合的主动轮廓模型对初始值不敏感且计算量小,对于自然图像可以很好地提取目标轮廓。为了使其更适用于SAR图像,本文将经典的CFAR技术融入到建模过程中,实现动态背景建模和分层虚警去除。将主动目标轮廓检测和被动虚警去除的思想统一起来,可以得到更可靠的舰船检测结果。本文首先使用杂波区域内的像素值进行参数估计,然后根据所设定的虚警率及估计的参数求取阈值。
假设Ω⊂R2为图像域,I(x):Ω→R为给定的灰度图像。均值和标准差的估计为
(6)
(7)


(8)
式中:T是阈值;Pfa是所设定的虚警率。
然后,本文定义了以下函数:
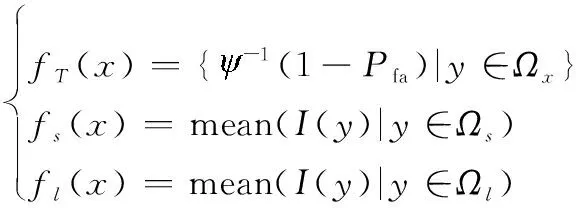
(9)
式中:Ωx表示以x为中心、半径为w的小邻域。Ωs和Ωl的定义为
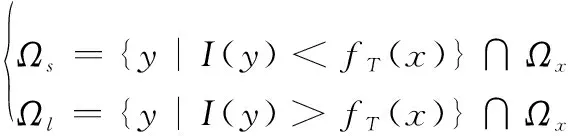
(10)
这意味着Ωs是图像强度小于Ωx中阈值的区域,Ωl是图像强度大于Ωx中阈值的区域。fT(x)是Ωx中的阈值,fs(x)和fl(x)分别是Ωs和Ωl中的平均强度。根据式(7)和式(8),对于给定的Ωx,可以直接计算函数fs(x)和fl(x)。图3以边缘点x为例,对相关变量进行了更直观的说明。蓝色线围成以x为中心点的区域Ωx。红色线Cx表示区域Ωs和Ωl的边界。
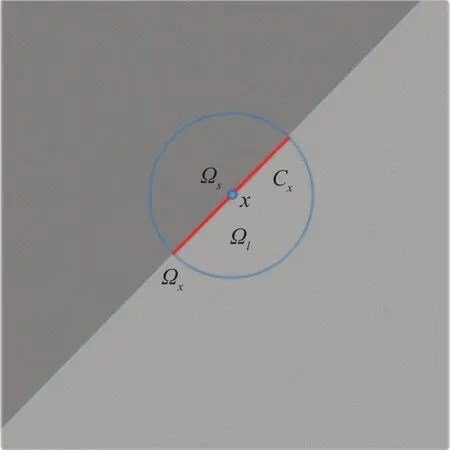
图3 在边缘点x处Cx、Ωx、Ωs和Ωl的说明。Fig.3 Illustration of Cx, Ωx, Ωland Ωlat edge point x.
接下来,定义局部能量函数如下:
(11)
式中:C为演化曲线;outside(C)和inside(C)分别表示局部区域内曲线C的外部和内部区域。给定一个中心点x,当曲线C正好位于目标边界上时,上述能量可以最小化,如图3中的Cx。
为了处理强度不均匀的图像,文献[24]在数据拟合项中引入高斯核函数Kσ来代替Ωx,提取局部区域的强度信息来指导轮廓的运动。σ是核函数的标准差,可以看作是控制局部区域大小的比例参数。由于高斯核函数的局部化性质,当y点远离中心点x时,强度I(y)的贡献减小到零。因此,局部能量由x附近y点的强度控制。同时,fs(x)和fl(x)可以看作是轮廓外部和内部高斯窗口中图像强度的加权平均值。因此,公式(11)中的Ex可以重写为
(12)
对于图像域Ω中的所有x点,需要最小化Ex的积分。因此,给出以下能量泛函ELPF-CFAR:
ELPF-CFAR(C)=
(13)
当ELPF-CFAR最小化时,曲线C将包含位于边界上的曲线。但在远离边界的区域会有一些多余的曲线。因此,需要添加长度约束项L(φ)来平滑和缩短曲线[24]。此外,添加了距离正则项P(φ),使模型不需要重新初始化[25]。
利用Lipschitz函数的零水平集φ来表示曲线C,整个能量函数可以表示为
FLPF-CFAR(φ)=ELPF-CFAR(φ)+vL(φ)+μP(φ)
(14)
式中:v和μ分别是长度项系数和距离调节项系数。ELPF-CFAR(φ)、L(φ)和P(φ)定义如下:
ELPF-CFAR(φ)=
(15)
(16)
(17)

(18)

(19)
式中:fs(x)和fl(x)根据式(9)和式(10)计算得出。在该模型中,fs(x)和fl(x)可以看作是局部逼近曲线C两侧图像强度的预拟合函数。fs(x)和fl(x)与水平集函数φ无关,只在演化开始计算一次,不需要在每次迭代中更新。
本文使用不同场景下的一些SAR图像来测试改进前后的轮廓检测模型的效果,实验结果如图4所示。
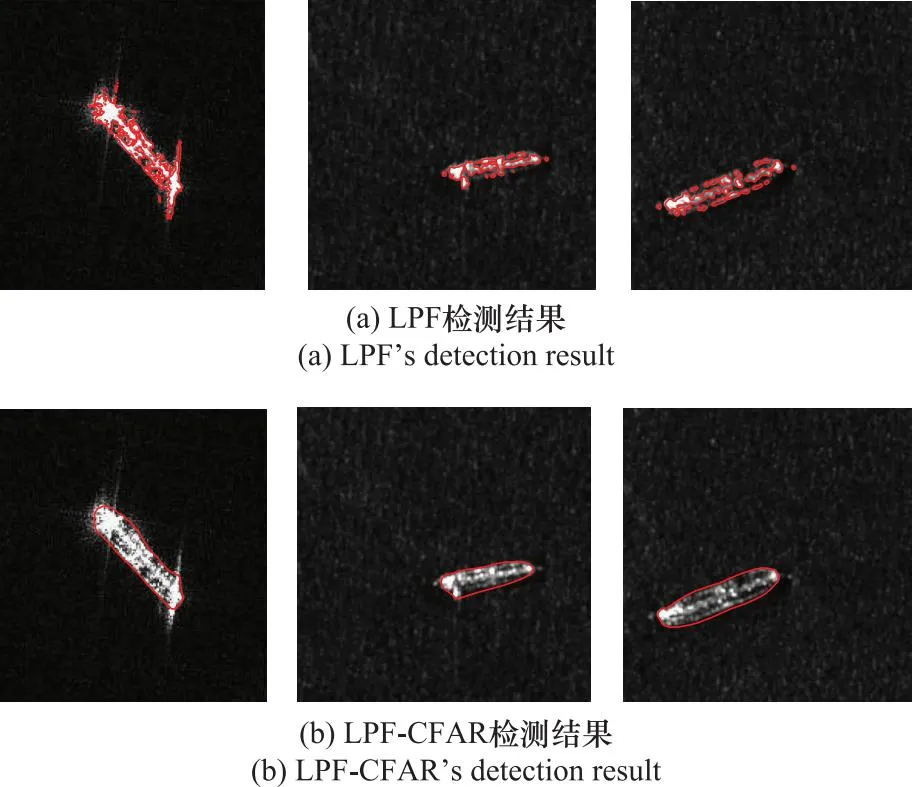
图4 LPF和LPF-CFAR检测结果对比Fig.4 Detection results comparison of LPF and LPF-CFAR
由图4可以看出,与LPF模型相比,LPF-CFAR能更准确地检测出目标轮廓。当杂波对目标区域影响较大时,LPF-CFAR可以更好地去除虚警,得到理想的分割结果。即使在目标边缘较弱或内部孔洞较大的情况下,该方法也能给出令人满意的真实舰船轮廓估计。因此,LPF-CFAR模型更适用于SAR图像检测。
3 实验结果及分析
3.1 数据集和参数设置
为了验证本文算法的性能,本文使用AIR-SARShip-1.0数据集[26]和高分辨率SAR图像数据集(high-resolution SAR images dataset, HRSID)数据集[27]进行测试。AIR-SARShip-1.0数据集来源于高分三号卫星,是一个面向宽幅场景的SAR舰船目标公开样本数据集,包含31幅SAR图像,图像分辨率分别为1 m和3 m,标注信息主要为舰船目标的位置,并经过专业判读人员的确认,目前该数据集以支持复杂场景下的舰船目标检测等应用为主。HRSID是用于高分辨率SAR图像舰船检测、语义分割和实例分割的数据集。该数据集共包含5 604幅高分辨率SAR图像和16 951艘舰船实例,包括具有不同分辨率、极化、海况、海域和沿海港口的SAR图像,分辨率分别为0.5 m、1 m和3 m。

(20)
3.2 实验结果对比
为了验证本文算法的有效性,将本文提出的SAR图像舰船目标检测算法与经典的检测算法进行实验对比。对比算法包括基于对数正态混合模型的CFAR(lognormal mixture-CFAR, LNM-CFAR)检测方法[28]、基于半参数杂波估计的CFAR(semiparametric clutter estimation-CFAR, SCE-CFAR)检测算法[29]、基于视觉注意(visual attention based, VAB)的目标检测算法[30]、基于超像素级CFAR(superpixel-level CFAR, SP-CFAR)的目标检测算法[31]和基于显著性检测(saliency detection, SD)的目标检测方法[18]。
首先使用AIR-SARShip-1.0数据集中的两幅图像进行算法对比分析,实验结果如图5和图6所示。图5(a)Image Ⅰ为原始SAR图像,图5(b)为地面真值图,图5(c)~图5(h)为检测结果。图6(a)Image Ⅱ为原始SAR图像,图6(b)为地面真值图,图6(c)~图6(h)为检测结果。可以看出,原始SAR图像中除了舰船区域内的弱散射外,角点反射也很明显,导致舰船目标附近出现亮线。这种强干扰信号的存在,使舰船目标的精确检测变得更加困难。使用LNM-CFAR、SCE-CFAR和SP-CFAR进行检测后,依然还存在一些海杂波,而由角反射引起的虚警作为被检测舰船区域的一部分被保留。VAB和SD可以很好地突出目标区域,但由于过于依赖尺度特性,导致目标轮廓不够清晰明显。而本文提出的算法结合尺度选择和轮廓检测,即使在弱散射单元中也能正确地检测到船内区域,消除了由角反射引起的虚警,更加符合人类的视觉特性,实现了准确的场景解译。
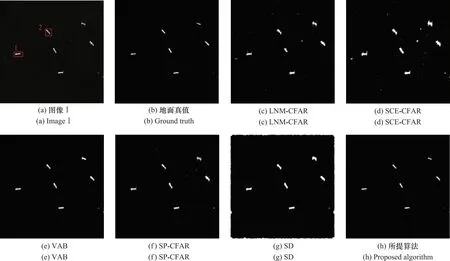
图5 SAR图像Image Ⅰ舰船目标检测结果Fig.5 Detection results of ship target in SAR image Image Ⅰ

图6 SAR图像Image Ⅱ舰船目标检测结果Fig.6 Detection results of ship target in SAR image Image Ⅱ
为了对检测结果进行详细的观察,将Image Ⅰ和Image Ⅱ中标记为1、2、3和4的4个矩形框对应的区域检测结果提取出来,如图7所示。可以看到,本文方法在抵抗强背景噪声和保持舰船区域完整性方面具有较好的性能,即使在舰船轮廓更加模糊的图像Image Ⅱ中,也能得到较好的检测结果。
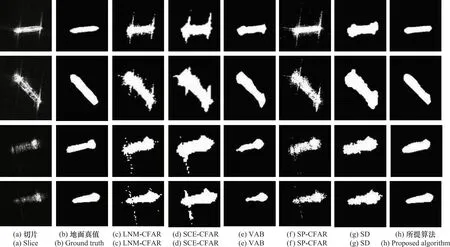
图7 Image Ⅰ和Image Ⅱ中矩形框1、2、3和4对应的4个局部舰船区域Fig.7 Four local ship regions corresponding to rectangular boxes 1, 2, 3, and 4 in Images I and Ⅱ
本文同时使用HRSID数据集中的两幅图像进行算法对比分析,实验结果如图8和图9所示。图8(a)中所示的Image Ⅲ为原始SAR图像,图8(b)为地面真值图,图8(c)~图8(h)为检测结果。图9(a)所示的Image Ⅳ为原始SAR图像,图9(b)为地面真值图,图9(c)~图9(h)为检测结果。从图8和图9可以看出,由于舰船区域内分辨单元接收到的回波大多较弱,且舰船目标轮廓更为模糊和不规则,舰船较为密集,因此具有更大的挑战性。图8(c)~图8(g)和图9(c)~图9(g)的检测结果有很多空洞,有些目标甚至被分割为若干个碎片。而本文提出的算法能够完整检测舰船目标,去除虚警。同样,本文提取Image Ⅲ和Image Ⅳ中标记为5、6、7和8的矩形框相对应的区域以进行详细观察,检测结果如图10所示。结果表明,本文算法在弱散射情况下可整体检测目标,即使在目标较为密集时,也能较好地保持舰船结构。
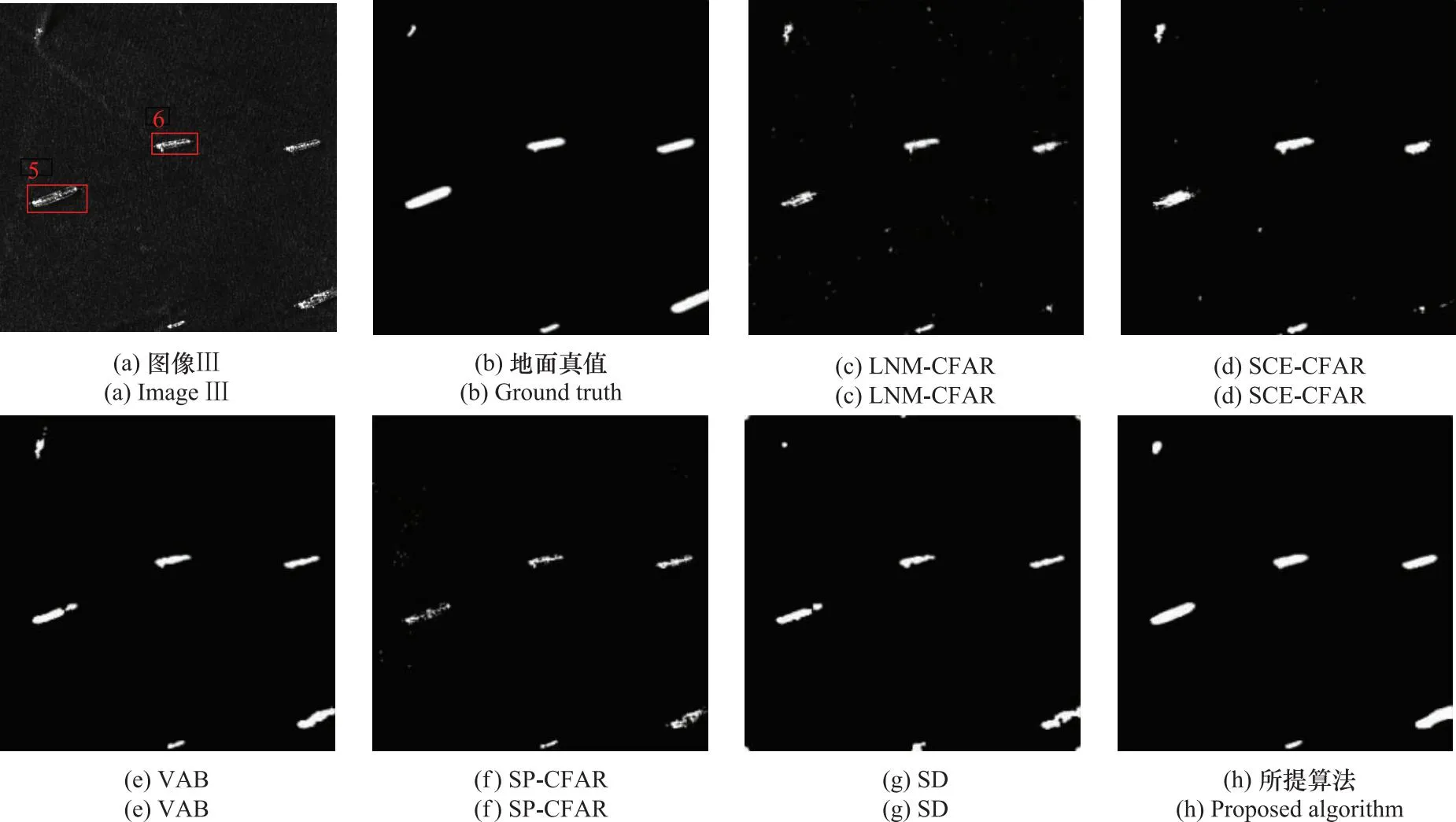
图8 SAR图像Image Ⅲ舰船目标检测结果Fig.8 Detection results of ship target in SAR image Image Ⅲ
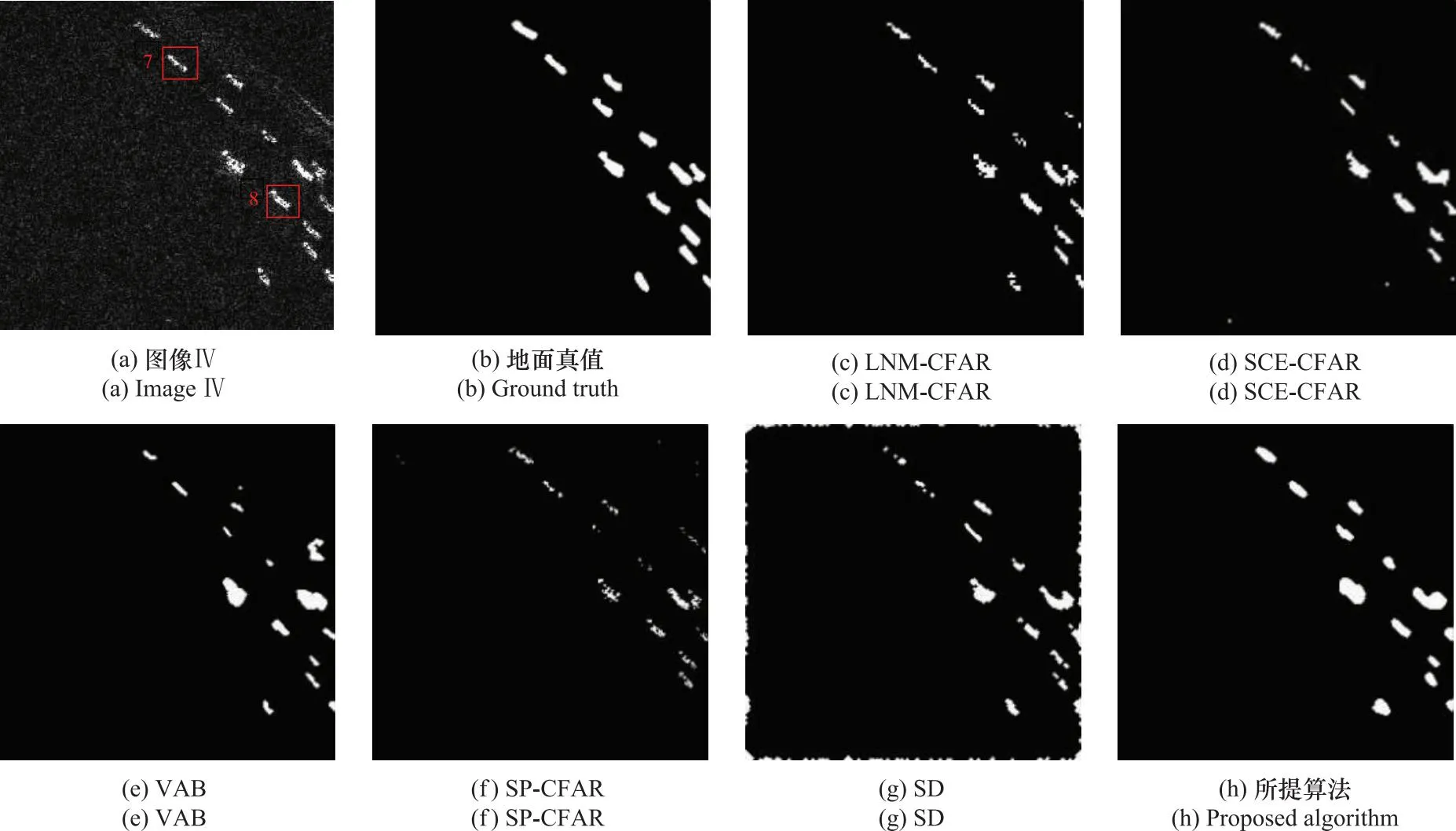
图9 SAR图像Image Ⅳ舰船目标检测结果Fig.9 Detection results of ship target in SAR image Image Ⅳ
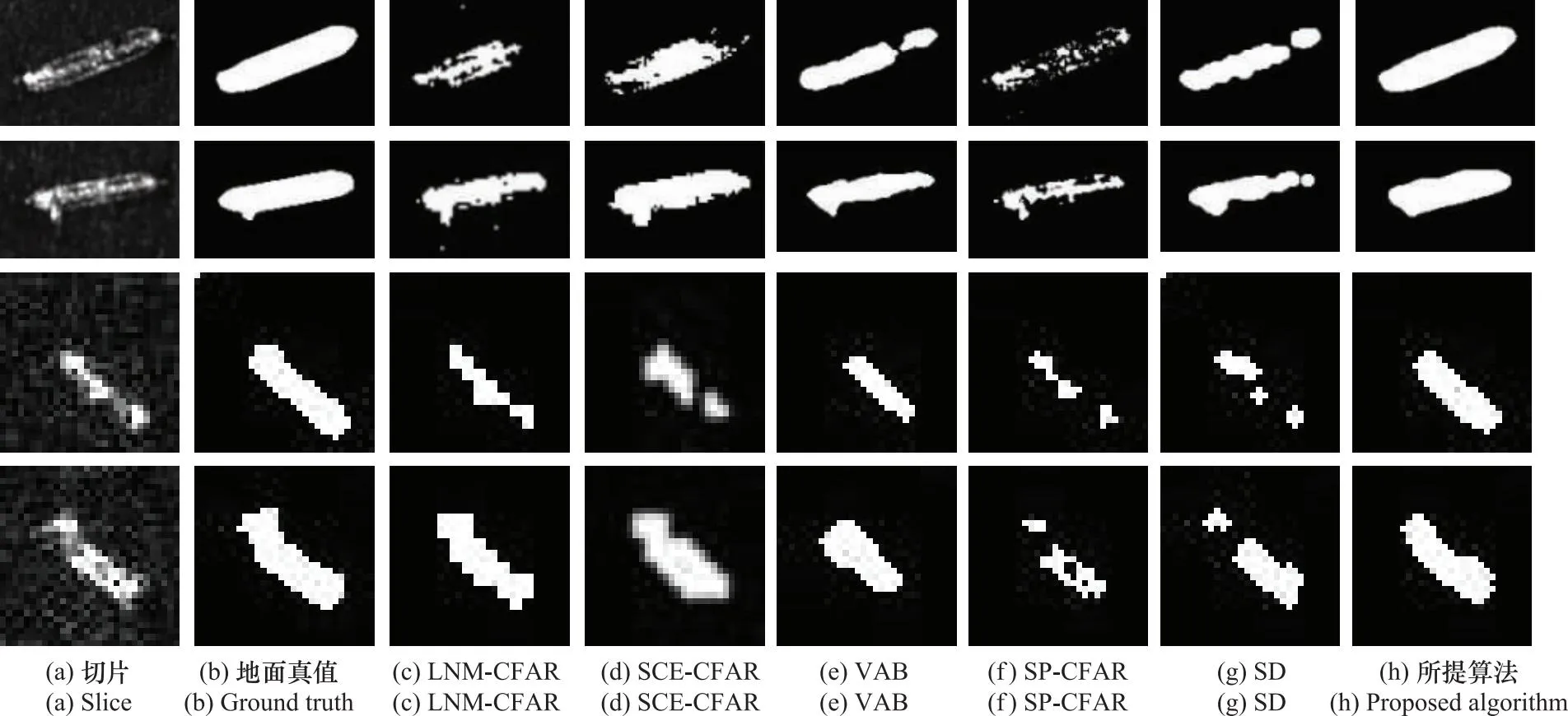
图10 Image Ⅲ和Image Ⅳ中矩形框5、6、7和8对应的4个局部舰船区域Fig.10 Four local ship regions corresponding to rectangular boxes 5, 6, 7, and 8 in Images Ⅲ and Ⅳ
为了更加客观地评价目标检测结果,本文利用检测率Pd和损失函数Tloss对上述舰船检测算法的性能进行定量评价。Pd值越大,Tloss值越小,说明算法性能越好。
(21)
Tloss=Pf+β(1-Pd)
(22)
式中:Ndt表示检测到的目标像素的个数;Nts表示目标像素总数;虚警率Pf=Ndc/Ncs,Ndc表示检测到的杂波像素的个数,Ncs表示杂波像素总个数;β说明了Pf(虚警损失)相对于(1-Pd)(漏警目标损失)的相对重要性。在实际应用中,一个好的舰船检测器应该在检测率和虚警率之间做出妥协。本文取β=1,即认为Pf和(1-Pd)具有同样的重要性。
表1给出Image Ⅰ-Image Ⅳ不同检测方法的客观评价值。可以看出,对于目标轮廓明显的Image Ⅰ,所有算法均具有较高的Pd值。对于目标边缘轮廓不明显的Image Ⅱ,所有算法的性能均有所下降,但本文算法依然具有最低的Tloss值。对于杂波较多的Image Ⅲ和Image Ⅳ,其他算法的性能下降明显,但本文所提方法依然具有最高的Pd值和最低的Tloss值。总体来看,本文算法具有一定鲁棒性,对于不同环境下的舰船目标能保持较高的检测率。
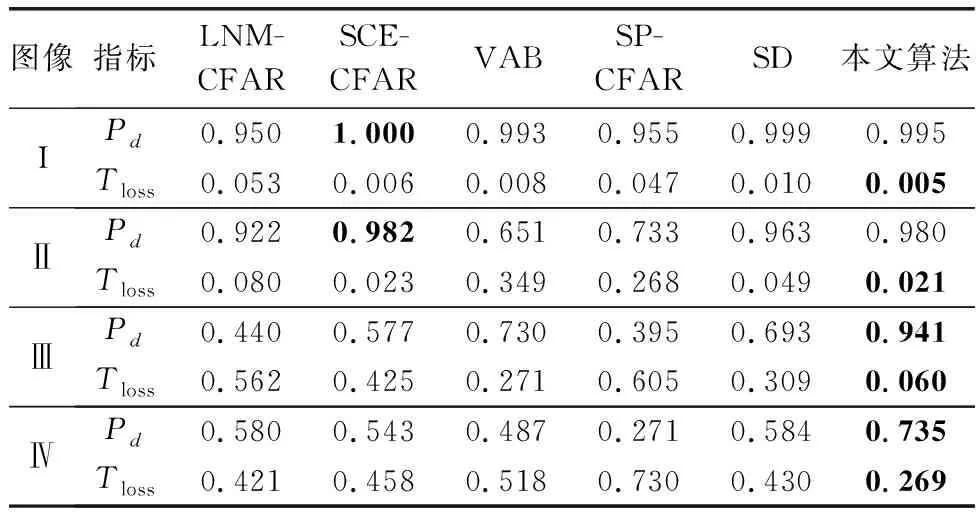
表1 Image Ⅰ-Image Ⅳ的客观评价指标
4 结 论
针对SAR图像中舰船目标轮廓检测不够完整的问题,本文提出了一种基于分层显著性的目标检测方法。首先使用基于NSST变换和SR法的全局显著性检测策略,快速定位潜在目标区域,并对图像进行显著性区域提取,得到ROI图像。然后,利用基于CFAR的活动轮廓显著性模型,使用图像的局部特征,从得到的ROI中提取舰船轮廓进行轮廓级滤波,得到精准的舰船目标。实验结果表明,本文提出的SAR图像舰船目标检测方法能够完整检测到舰船目标,有效去除虚警,实现准确的场景解译。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
兵工学报(2022年11期)2022-12-01
舰船科学技术(2021年12期)2021-03-29
装备制造技术(2020年1期)2020-12-25
制造技术与机床(2019年11期)2019-12-04
物联网技术(2019年9期)2019-11-06
科学与财富(2017年24期)2017-09-06
设备管理与维修(2017年1期)2017-04-11
舰船科学技术(2016年1期)2016-02-27
计算机工程(2015年4期)2015-07-05