一种基准关联的空间尺寸远心视觉测量方法
2024-02-02 08:12张英杰高裴裴樊梦琦
红外技术 2024年1期
刘 峰,张英杰,高裴裴,樊梦琦
〈测量技术〉
一种基准关联的空间尺寸远心视觉测量方法
刘 峰1,张英杰1,高裴裴2,樊梦琦1
(1. 天津大学 精密测试技术及仪器国家重点实验室,天津 300072;2. 南开大学 计算机学院,天津 300071)
针对具有横截面外伸尖端特征的长轴工件,本文研究了一种基准关联的空间尺寸远心视觉测量方法。该方法首先利用远心成像实现较长尺度工件的局部待测要素的图像特征提取和位置测量,而后建立局部待测要素与相机成像视场以外的轴线基准要素的测量传递链,将局部要素经计算转化成全局径向尺寸,从而实现超过成像视场尺度的快速精密测量。构建了测量实验环境,对方法的有效性进行了验证,对误差进行了溯源和分析并给出了进一步提升精度的建议。本方法能够在远心平行投影条件下实现对立体工件的空间几何量测量,特别适用于对速度和精度均要求较高的在位测量应用场合。
空间尺寸;局部要素;基准关联;远心测量
0 引言
工业检测应用中,有一类零件其拓扑结构如图1所示,该类零件具有在线测量的实际需求,其横截面外伸尖端边缘要素相对于长杆轴心的距离是测量的关键几何量,关系到了装配后的回转精度,但其自身结构特点却给在线测量带来一定的难度。该类零件类似于精密轴系,具有长杆技术特征和回转技术特征;轴上零件形式多样,可为薄壁锯片、外伸管等,接触式测量会对工件造成损伤,如何实现快速和高精度非接触测量成为了本研究的关键问题。
由于该类工件结构的特殊性,现有非接触测量方法和设备应用受限,如光栅投影测量,对于金属表面反光材料较敏感,且待测要素为尖端角点,要素精确提取受限[1-3];当采用三坐标测量机激光三角法进行测量时,也面临着上述类似问题,尖端角点要素精确获取较困难[4-5];较为常见的影像测量方式,当轴上零件处于长杆两侧端面位置处时具有测量的可能性,但当轴上零件位于中段轴径时,如何实现边缘尖端要素到轴线的距离成为了难点问题,目前采用的方式多为人工影像分解测量,但效率低,装配精度无法客观评价[6-7]。另外,由于轴上零件的径向尺度延展特性,高精度光学测量系统一般无法在一个较大光学孔径下对轴端面和零件尖端要素同时成像,因为大光学孔径会影响测量精度,另外以较大的光学孔径覆盖较大的机械孔径,意味着成本的增加,系统设计昂贵[8-9]。因此,研究一种适用于该类工件的非接触、快速、高精度的标定方法具有十分重要的意义。

图1 待测工件拓扑结构简图
本文研究了一种基准关联的空间尺寸远心视觉测量方法,推导了外伸尖端实际要素至测量基准回转轴虚拟要素之间的空间几何量远心视觉测量模型,建立了测量传递链,完成了实验环境构建并对方法的有效性进行了验证。
1 测量原理
测量原理图如图2所示。待测长杆件放置于两端精密V台支承上,借助于其自身回转特点,提供精确的回转轴线基准。精密V台支承下端为精密升降机构,用于补偿由于轴径尺度不同所形成的高差即可做调平处理,使得长杆件处于测量状态时轴线水平。测量相机位于长杆件的一侧,采用小光学孔径较高倍率远心镜头,其视场只覆盖待测尖端要素局部区域。背景光源位于待测工件另一侧,与测量相机构成对射照明布局,用于提升尖端要素的成像对比度。测量装置的安装基底工作台面设计有燕尾导向机构,用于保证台上同轴光学部件工装的共轴性。本测量装置要实现的测量目的是:当待测要素旋转至测量相机的视场区域时,测量相机一方面会对局部区域的尖端角点要素进行位置测量,另一方面,测量位置会关联到轴线测量基准,实现全局尺寸测量。
图2中,1为导向工作台面(Oriented work surface);2为精密升降机构(Precision lifting mechanism);3为精密V台支承(Precision V-shaped block);4为位姿调整台(Pose adjustment block);5为待测长杆右侧安装的测量相机(Measuring camera mounted on the right side of the rod);6为长杆截面外伸待测工件(Workpiece protruding from the rod);7为照明光源(Lighting source);8为触发测量传感器(Trigger measuring sensor)。

图2 测量原理图
2 方法建模
一种基准关联的空间尺寸快速测量方法,主要包括远心视觉系统在位标定方法和测量区域至测量基准轴线的尺寸链关联方法。
2.1 远心视觉系统在位标定方法
远心视觉系统为由测量相机、透射靶标与背景照明光源所组成的远心视觉系统,由于需要同时兼顾快速和高精度测量需求,该视觉测量系统设计为窄视场高精度远心视觉测量系统,其监测视场只覆盖待测工件横截面外伸尖端要素,以保证在待测工件局部测量区域内的几何要素的高精度测量。
首先需要对测量相机进行标定,使用的靶标为棋盘格靶标,将世界坐标系的-平面假定在棋盘格靶标所处于的平面上,此时,这个平面就是沿=0的平面方向,可以将平行投影模型的外参矩阵降低一个维度,如式(1)所示:

首先按照理想平行投影模型对式(1)中的参数进行化简变形,变形后,如式(2)所示:

将式(2)转化为最小二乘的结构形式,如式(3)所示:

将棋盘格角点的图像坐标与世界坐标代入式(3),矩阵和矩阵可以通过将棋盘格上角点在图像坐标系下的坐标和在世界坐标系下的坐标代入式(3)解得,而系数矩阵的求解,使用的是最小二乘算法。由于旋转矩阵是单位正交阵,则有式(4)所示的如下性质:
将上述各式联立,得到式(5):

综合式(3)和式(5),可以解算出平移参数t,同时解算出系数矩阵中的其他参数,之后便可获得旋转矩阵与平移向量。
由式(2),同时利用旋转矩阵和平移向量,能够完成对双远心镜头的放大倍率的解算。
上文中并未引入镜头畸变带来的误差,实际远心镜头只会引起很小的畸变,因此,将畸变模型里大于三次项的系数舍弃。根据畸变模型,本文在对镜头的标定中引入径向畸变和切向畸变,得到测量系统中双远心镜头的畸变模型,如式(6)所示:

式中:、各自代表了在图像坐标系中沿和方向的畸变;1、1、2是径向和切向畸变系数。在引入畸变的成像模型中,对于图像某点理想坐标(u,v),有对应的实际坐标(u,v)满足式(7):
双远心镜头畸变系数的解算在求解出理想成像模型中的内参和外参之后进行,考虑到该系数较小,可以将该系数的初始值定为0,以提升标定过程的效率。利用已得到的成像模型的内参和外参,结合畸变系数,统一作为目标方程的初值,将问题转化为非线性优化寻找最优解的问题。最优解的求取使用Levenberg-Marquardt(LM)算法,建立数学模型,令角点坐标的计算值与实际值的差值最小,模型如式(8)所示:

式中:为角点数量;p是角点p在图像坐标系中的实际坐标;p是利用远心成像模型解算出的坐标;其中p可以表示为p(,,,1,1,2),为双远心镜头的放大倍率;11、2为畸变系数。代入各参数的初值到目标方程后,将目标方程做最小化处理,所得的各参数值即为优化后的解。
2.2 测量区域至测量基准轴线的尺寸链关联方法
将上述的局部测量区域的几何要素,关联至相机视场以外的回转轴线测量基准,实现超视场尺度关联。
将远心成像模型中的世界坐标到基准关联模型中的世界坐标之间的变换关系的求解转化为对式(9)中矩阵的求解:
=(9)
式中:(1,1,1)为摄像机坐标系下的各标志点世界坐标;(2,2,2)为经过变换后对应的世界坐标。考虑到解算变换矩阵即是求解和,且旋转矩阵和平移向量是两个坐标系之间的变换关系矩阵。
对和的解算所用方法为奇异值分解法。该方法主要利用矩阵的构造和分解。
首先,分别在摄像机坐标系下,以及轴线基准坐标系下获取得到和,根据和,构造变换矩阵:

式中:¢和¢分别表示和各自坐标系下质心化的世界坐标。
对进行奇异值分解:
××T(11)
=T(12)
最后将的值代入关系式中,即可解算出平移向量。
2.3 全局尺寸计算
远心成像模型世界坐标系与基准关联模型世界坐标系之间的刚体变换关系可以由旋转矩阵和平移向量来建立。变换关系确定后,只需使用远心测量系统对待测几何要素的世界坐标(3,3,3)进行测量,即可求得在基准坐标系中的三维世界坐标(4,4,4),即实现了坐标的全局统一,后续便可在同一坐标系下完成对待测几何量的解算。
3 实验验证
3.1 实验装置及实测数据
为验证本文方法的有效性,在实验室的环境下构建了远心测量方法实验验证环境,场景照片如图3所示。测量相机采用1/1.8英寸可见光CCD,分辨率200万像素,像元大小4.4mm;镜头采用远心镜头,放大倍率0.17,工作距离110±2mm,TV畸变0.01%,物方远心度<0.01°;光源选用白光LED面光源照明;真值测量及测量校验环节在ROMER柔性关节臂式三坐标测量机环境下进行。

图3 实验验证环境场景
在图3所示实验环境场景中,(a)组照片为所设计的关联靶标成像及空间标定实验场景;(b)组照片为具有标准轴和横截面外伸尖端的待测工件测量及角点提取实验场景。在该测量验证环境下,部分典型实验数据结果如表1所示。
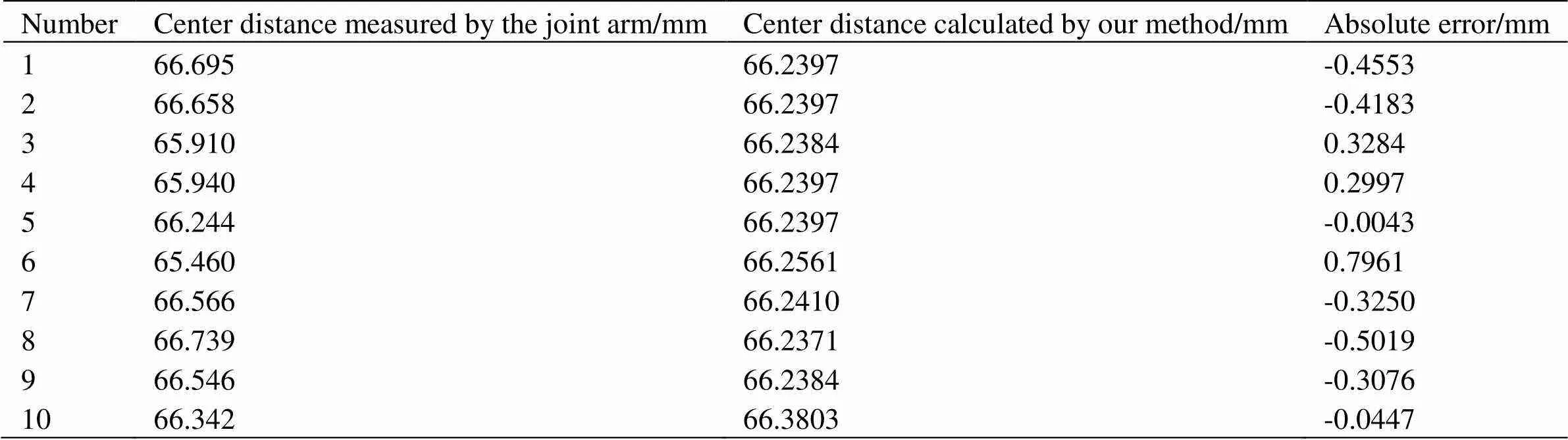
表1 本文方法测量结果
3.2 误差溯源及分析
分析上述实验结果,绝对误差分布在0.1mm临界区间内,分析如下:
1)表1中,小于0.1mm的数据并非随机测量数据,经关节臂坐标校验发现,该类数据的产生是出现在标准轴转动定位精度很好的场合,定位重复性达到了微米级,因此,测量结果相对较好;
2)而对于表1中大于0.1mm的数据,经关节臂坐标校验,转动定位误差浮动较大,经狄克松准则进行判断并不属于随机粗大误差,因此可以确定误差来源的主要因素之一是钢制V台支承的回转精度有限,若通过表测法进行回转误差统计,并在测量方向上进行分解,可得到所在测量方向上的误差分量,补偿后将有助于精度提升;
3)实验进一步对测量结果的误差源进行追溯,按照影响程度等级进行排列,主要为:钢制V台支承回转精度、靶标制造精度、工装的水平和垂直程度、相机的有效分辨率和畸变。
4)实验验证及分析表明,若在V台的等级、靶标加工精度、相机分辨率以及镜头的视场和线对数方面进行改善,将能够提升方法的综合检测性能,达到与影像测量仪水平相当的检测效果。
5)若增加回转精度在位补偿环节,如PSD激光位移传感器实时修正和补偿回转误差,将使得方法形成闭环反馈,实时误差矫正,测量精度将会进一步得到提升达到更高精度等级。
4 结论
本文研究了一种基准关联的空间尺寸远心视觉测量方法,力求解决该类零件无法实现快速精密测量的问题,问题的关键在于,待测几何量属于空间几何量,其一端为可见尖端角点实际要素,另一端为不可见轴线虚拟要素,实际要素与虚拟基准要素之间的空间距离成为了快速测量的难点,实际课题研究中,还面临着传感布局空间受限等诸多制约因素。因此,本文综合研究了待测工件特点及测量原理、方法的建模过程、方法验证实验,分析了误差源以及提升测量精度的措施,对方法的有效性进行了较为充分的验证。结果表明:方法将能够同时满足径向空间关键尺寸的快速、高精度测量需求,解决线上测量迫切需要解决的工程实际问题。
[1] WANG Z, ZHANG Z, GAO N, et al. Single-shot 3D shape measurement of discontinuous objects based on a coaxial fringe projection system[J]., 2019, 58(5): A169.
[2] CUI H, LI Z, TIAN W, et al. Multiple-exposure adaptive selection algorithm for high dynamic range 3D fringe projection measurement[C]//10th(ISPEMI 2018), 2019, 11053: 145-150.
[3] 李绪琴, 苏显渝, 陈文静. 基于正交光栅投影的快速调制度测量轮廓术[J]. 光子学报, 2018, 47(12): 100-108. LI Xuqin, SU Xianyu, CHEN Wenjing. Fast modulation measurement profilometry based on orthogonal grating projection[J]., 2018, 47(12): 100-108.
[4] VI MorenoOliva, E RománHernández, E TorresMoreno, et al. Measurement of quality test of aerodynamic profiles in wind turbine blades using laser triangulation technique[J]., 2019, 7(5): 2180-2192.
[5] 史尧臣, 周宏, 唐武生,等. 基于激光三角法的汽车同步带齿形轮廓参数测量[J]. 仪器仪表学报, 2019(6): 138-145. SHI Yaochen, ZHOU Hong, TANG Wusheng, et al. Measurement of tooth profile parameters of automobile timing belt based on laser triangulation method[J]., 2019(6): 138-145.
[6] DUAN Y, DU W. Research on automatic positioning method of image measuring instrument[J]., 2019, 42(10): 95-98.
[7] 王冰鹤, 康岩辉, 孙双花. 基于线纹尺拼接的大尺寸影像测量仪校准方法[J]. 计量学报, 2019(S01): 8-11. WANG Binghe, KANG Yanhui, SUN Shuanghua. Calibration method of large-size image measuring instrument based on stitching of line ruler[J]., 2019(S01): 8-11.
[8] ZHANG S, LI B, REN F, et al. High-precision measurement of binocular telecentric vision system with novel calibration and matching methods[J]., 2019(99): 1-1.
[9] 宋代平, 陆璐. 多相机非共视场的非合作圆特征位姿测量方法[J]. 红外技术, 2020, 42(1): 93-98. SONG Daiping, LU Lu. Non-cooperative circle feature pose measurement method based on multi-camera non-common field of view[J]., 2020, 42(1): 93-98.
Telecentric Vision Measurement Method of Space Size Based on Datum Correlation
LIU Feng1,ZHANG Yingjie1,GAO Peipei2,FAN Mengqi1
(1.,,300072,;2.,,300071,)
This study investigated a spatial dimension telecentric vision measurement method based on benchmark correlation that aims at the long-axis workpiece with the characteristic of the protruding tip of the cross-section. First, telecentric imaging was used to realize the image feature extraction and position measurement of the local elements to be measured by the longer-scale workpiece. Then, a measurement transfer chain between the local elements and the axis reference elements outside the camera imaging field of view was established. The local element dimensions were converted into the global radial dimensions through calculations to achieve fast and accurate measurement beyond the scale of the imaging field of view. A measurement experiment environment was constructed to verify the effectiveness of this method, trace and analyze the error source, and give suggestions to further improve the accuracy. This method can realize the measurement of the spatial geometric quantity of the three-dimensional workpiece under the condition of telecentric parallel projection and is particularly suitable for on-site measurement applications that require high speed and accuracy.
spatial dimensions, local elements, benchmark correlation, telecentric measurement
TH702
A
1001-8891(2024)01-0094-05
2021-09-23;
2022-02-10.
刘峰(1978-),男,博士,主要研究方向为计算机视觉与影像测量。E-mail: tjuliufeng@tju.edu.cn。
高裴裴(1978-),女,副教授,主要研究方向为视觉建模技术。E-mail: 53421611@qq.com
猜你喜欢
科学中国人(2018年8期)2018-07-23
摄影之友(影像视觉)(2017年10期)2017-11-07
公民与法治(2016年19期)2016-05-17
读者·校园版(2015年7期)2015-05-14
断块油气田(2014年5期)2014-03-11
癌变·畸变·突变(2014年2期)2014-03-01
机械制造与自动化(2014年1期)2014-03-01
河南科技(2014年15期)2014-02-27
电子设计工程(2014年6期)2014-02-27
癌变·畸变·突变(2014年6期)2014-02-27