虚拟负电感控制的高频段参数整定方法
2024-02-04 09:18黄锦敬
电力系统及其自动化学报 2024年1期
曹 敏,黄锦敬
(湛江科技学院智能制造学院,湛江 524094)
我国在第二十一届联合国气候变化大会明确提出减排目标,首先2030 年单位国内生产总值二氧化碳排放比2005 年下降60%~65%,并使二氧化碳排放总量达到峰值;其次争取2060 年前实现碳中和[1−2]。基于风、光、储等新能源的工业园区微电网供电技术,不仅可以减少碳排放,还可以保证园区供电的可靠性和自主性[3]。
相比交流微电网技术,直流微电网具有结构简单、成本低、无谐波、没有无功和三相不平衡等优势[4−6]。尽管直流微电网具有诸多优势,但直流微电网的高度电力电子化增加了电压稳定控制的难度。工业园区直流微电网的负载主要包括驱动电机、制冷设备、加热设备、照明设备和办公设备等。交流电机结构简单且寿命较长,但需要逆变器才可以接入直流电网,在恒速控制下,其逆变器和电机的整体瞬时输入功率恒定,因此被称为恒功率负载(CPL,constant power load)[7]。CPL 表现出增量负阻抗特性,且该特性会随功率的增加而增强。此外,为了消除逆变器高频开关产生的谐波电流和电磁干扰,CPL 需要通过LC 低通滤波器接入直流母线[8]。但CPL 的负阻抗特性会导致LC 滤波器的系统阻尼系数小于0,使得系统趋于不稳定并引发直流电压振荡。由于在直流微电网中没有无功功率的波动,因此直流母线电压是衡量直流微电网安全与稳定运行的唯一指标[9]。如果直流电压不稳定,将会引起保护设备误动作和设备损坏,进而影响工业园区的安全运行。因此,维持直流电压稳定是维护直流微电网发−配−用电安全性和可靠性的关键[9]。
为了解决直流电压振荡问题,国内外学者进行了大量的研究,方法主要分为无源阻尼法和有源阻尼法两类。无源阻尼法直接在硬件电路中增加阻尼电阻或滤波电容来解决CPL 引起的电压振荡问题。Mauricio等[10]对比分析了串联和并联无源阻抗电路在增强系统阻尼方面的差异,介绍了不同阻抗网络的设计方法。杨忠林等[11]在直流母线上添加无源阻尼电路,增大系统阻尼,从而确保系统稳定。无源阻尼法不需要改变原有变换器的控制方式,结构简单,但无源阻尼法增加了系统体积和能量损耗。有源阻尼法是通过DC−DC 变换器或负载逆变器的控制算法产生增强系统阻尼的等效虚拟阻抗,增强系统稳定性。文献[7]将输入电压前馈到电流环中,构造出与DC−DC 变换器并联的虚拟电阻,改变恒功率负载的负阻抗特性,进而提高系统稳定性。文献[12]通过负载DC−DC变换器的电压前馈,构造出并联和串联虚拟阻抗两种方式同时调节变换器的输入阻抗,消除级联系统的直流电压振荡。文献[13]利用滑模扰动观测器精确估计DC−DC变换器输入电压波动,再通过二阶低通滤波器前馈到电流环,产生阻尼电流,抵消一部分CPL 的负阻抗特性,增强系统稳定性。以上方法都需要向负载变换器中注入一定量的能量,来改变恒功率负载的负阻抗特性,但该能量不会凭空消失,传递到负载变换器的输出端势必影响用电设备。文献[14]巧妙地通过下垂回路构造出与负载侧电感串联的虚拟负电感,以此抵消部分负载侧电感来增加系统阻尼并提高了系统稳定性。文献[15−16]在虚拟负电感的基础上增加非线性扰动观测器对扰动电流进行观测,既增强了系统稳定性,又摆脱了对电流传感器的依赖。针对并网逆变器直流侧电压稳定问题,文献[17]在逆变器控制中引入虚拟负电感控制策略来抑制直流电压振荡,拓展了虚拟负电感控制的应用场景。文献[18]提出了自适应虚拟负电感控制策略,根据负载功率的不同自适应地改变虚拟负电感大小,进而提高多种工况下的控制精度和稳定裕度。虽然虚拟负电感的控制方法有效地增强了直流电网电压稳定性,但虚拟负电感的有效范围受限于变换器的电压闭环带宽。
考虑工业园区的实际微电网结构,本文以并联Buck/Boost 变换器、LC输入滤波器和永磁同步电机驱动装置构成的系统为研究对象,研究虚拟负电感控制的高频段参数整定方法。首先,在理想状态下分析直流微电网电压振荡机理和虚拟负电感工作原理;其次,分析虚拟负电感控制在高频段失效的原因和受限因素,提出高频段补偿策略,并通过阻抗比判据进行稳定性分析;最后,设计实际变换器虚拟电感的检测方法和工程设计方法,并利用实验验证控制策略的有效性。
1 直流微电网虚拟负电感控制
相比居民区,以清洁能源为主的直流微电网在工业园区具有更大的发展潜力。工业园区的直流微电网通常包括分布式光伏电池、分布式风力发电机、储能电池、负载及各种接口变换器构成,如图1(a)所示。光伏和风力发电采用最大功率点跟踪控制,最大程度地实现对清洁能源的利用。多组储能电池通过DC−DC变换器接入直流母线,用来解决清洁能源与负载需求间的不平衡。由于负载对电压等级要求不同,负载也需要通过DC−DC变换器或DC−AC变换器连接电网。虽然变换器提高了供电质量,但也增加了直流微电网的电力电子化程度。为了抑制变换器中高频开关产生的谐波电流和电磁干扰,负载需要通过LC滤波器接入直流母线,如图1(b)所示。
1.1 直流微电网的稳定约束条件
DC−DC 变换器采用Buck/Boost 拓扑和平均电流控制模式,其输出电压闭环传递函数为
式中:Gu(s)和Gi(s) 分别为输出电压和电感电流开环传递函数;Cu(s)和Ci(s) 分别为电压和电流控制器传递函数;T(s) 为DC−DC 变换器输出电压闭环传递函数。
理想状态下,采用下垂控制的微电网直流母线电压upcc(s)为
式中:Rd为下垂系数;io(s) 为变换器输出电流;Uref(s) 为电压给定;rk为变换器线路电阻。
根据式(2)和LC 滤波器电路特性,可得到LC滤波器电容电压uC(s) 为
式中:Rdamp为阻尼电阻,Rdamp=Rd+rk+rf;RL为负载电阻;Cf和Lf分别为滤波器电容和滤波器电感;rf为滤波器电感的串联电阻。从式(3)可以看出,源侧变换器的传递函数T(s) 和特征方程共同决定了LC滤波器的电压稳定性。
由于CPL 的功率恒定,CPL 的电流和电压呈反比。利用切线替代曲线的方式,得到CPL电压和电流的传递函数为
式中:iCPL(s)为恒功率负载的电流;UC,static为静态工作点的电容电压;PCPL为恒功率负载的功率。
根据式(3)和式(4),负阻抗容易使得特征方程出现右半平面的特征根,造成系统失稳。通过减小滤波器电感Lf、增大电容Cf、增大下垂系数Rd、增大电容电压UC,static和减小CPL功率PCPL,都会增大特征方程一次项系数(增大系统阻尼),有助于提高稳定性。但增大下垂系数、增大电容电压UC,static和减小CPL 功率PCPL,也会减小特征方程的常数项,使得稳定性降低。根据劳斯判据,在DC−DC变换器电压闭环T(s) 稳定的前提下,特征方程的各项系数均大于0才能保证系统稳定,进而得到系统稳定必须满足的约束条件为
综上所述,在直流微电网中增大滤波器电容Cf和减小滤波电感Lf能显著提高系统稳定性和容纳CPL的功率上限。而下垂系数Rd、电容电压UC,static和CPL功率PCPL等参数对稳定性的影响更加复杂,并非简单的线性关系。
1.2 虚拟负电感控制策略
相比其他参数,通过调整滤波器电容和电感来增强系统稳定性会更加便捷有效。LC滤波器主要滤除功率开关器件引起的干扰,很多情况下电感和电容参数不能随意调整。文献[15]通过在下垂控制环节引入虚拟负电感来调整有效电感值。理想状态下,引入虚拟负电感的微电网直流母线电压为
式中,Lv为虚拟负电感。
根据式(6)和LC滤波器电路特性,得到引入虚拟负电感后的LC滤波器电容电压为
理想状态下系统的稳定约束条件变为
根据式(7)和稳定约束条件,虚拟负电感−Lv将抵消部分滤波电感Lf,增加系统带恒功率负载的能力,从而提高稳定裕度。在滤波方面,由于虚拟负电感−Lv并非真实改变滤波器电感值,因此虚拟负电感并不影响LC滤波器的滤波效果。
2 虚拟负电感控制的高频段参数整定
2.1 电压带宽对虚拟电感的影响
在理想的下垂控制下,变换器的输出阻抗完全取决于下垂回路的增益。实际变换器中,下垂控制是通过电压闭环实现的,电压闭环特性会显著影响输出阻抗大小。此时,直流母线电压为
式中:Zo(s) 为电压闭环控制下的DC−DC 变换器输出阻抗;Zdroop(s) 为虚拟负电感控制下的DC−DC 变换器输出阻抗。根据式(10),采用虚拟负电感的变换器输出阻抗取决于下垂系数Rd、负电感Lv、电压闭环环节T(s) 和闭环输出阻抗Zo(s) 。在电压闭环T(s) 的带宽范围内,闭环增益接近1 且相位趋近于0,保证了良好的跟随性能。当频率超出电压闭环T(s) 带宽范围时,闭环增益随着频率增大而迅速减小,实现对高频干扰的抑制。由式(9)和式(10)可知,虚拟负电感是通过改变下垂控制回路来实现的。由于下垂控制回路是在电压、电流双闭环的外环中进行电压和电流调节,其特性会受到电压和电流闭环控制的限制。图2 为理想情况下电压闭环及阻抗的伯德图,其中曲线1−曲线4分别对应电压闭环T(s) 、LC滤波器的输出阻抗、理想情况下和实际DC−DC 变换器的闭环输出阻抗。变换器的控制参数如表1 所示。由图2 可知,理想情况下DC−DC变换器输出阻抗的低频段幅值和相位分别为9.54 dB 和0°,高频段幅值以20 dB/dec 的斜率上升且相位滞后90°,符合电阻和负电感的组合特性。实际上,由于电压闭环T(s) 的带宽是624 rad/s,在带宽范围内变换器的输出阻抗基本与理想状态吻合,但超出闭环带宽范围实际虚拟负电感的作用被削弱了,频段也会受到电压闭环带宽大小的限制。
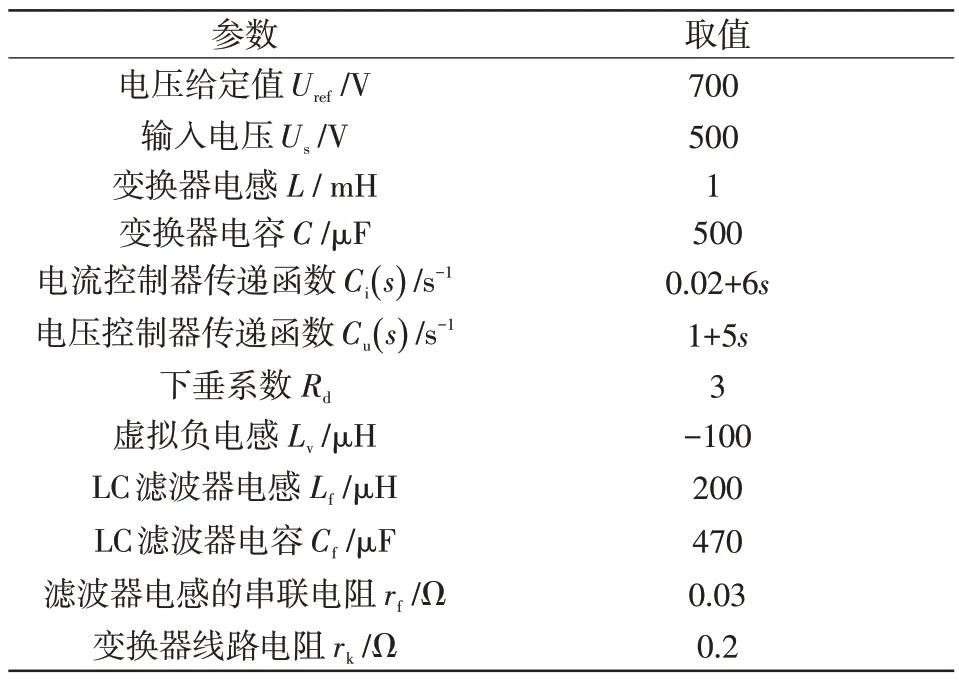
表1 变换器控制参数Tab.1 Control parameters of converter
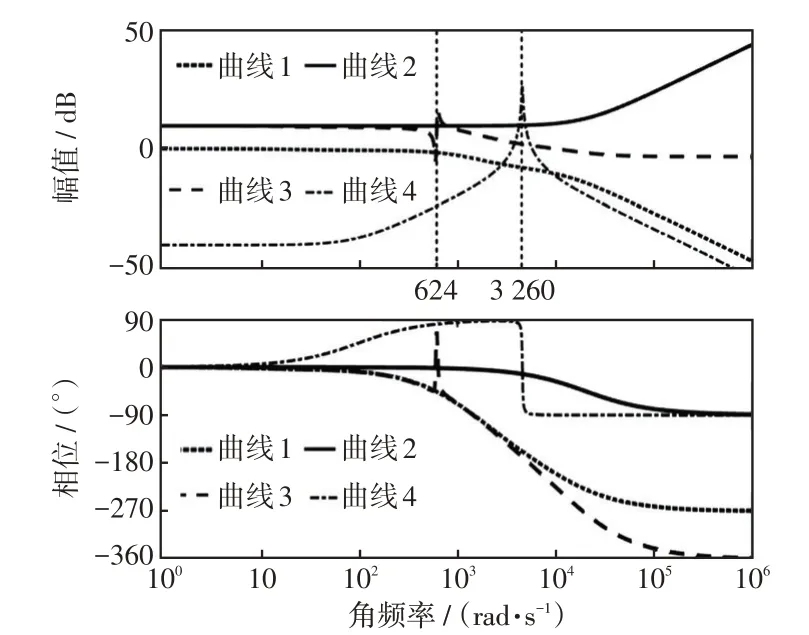
图2 理想情况下电压闭环及阻抗的伯德图Fig.2 Bode diagram of voltage closed-loop and impedance under ideal conditions
不考虑DC−DC 变换器对LC 滤波器的影响时,LC滤波器的输出阻抗Zf(s) 为
图2 中LC 滤波器输出阻抗的谐振频率为3 260 rad/s,大于DC−DC变换器的闭环带宽,虚拟负电感很难起到足够的补偿作用。
2.2 高频段虚拟电感补偿策略
为了解决虚拟负电感在高频段失效的问题,提出了高频段虚拟电感补偿策略,如图3所示。由于闭环控制在高频段近似以40 dB/dec 的速率递减,补偿环节需要增加两个零点来抵消电压闭环对虚拟负电感的影响。然而,实际系统中不希望高频段完全呈现电感特性,以免引入高频干扰。为此,还需要引入大于电压闭环带宽的二阶低通滤波器,控制结构如图3(a)所示。高频段补偿环节采用双极点双零点补偿器,其输出阻抗为

图3 补偿电路和补偿后虚拟阻抗伯德图Fig.3 Compensation circuit and Bode diagram of virtual impedance after compensation
其中
式中:Ch(s) 为高频补偿环节传递函数;a和b分别为高频零点和极点,且a<b。双极点双零点补偿器的零点可实现矫正高频段负电感失效的作用,大于零点的极点既可以抑制高频干扰,又可以调节虚拟负电感的有效范围。
图3(b)中,曲线1 和曲线2 分别为理想情况下和采用虚拟负电感的DC−DC变换器输出阻抗,曲线3和曲线4分别为在高频补偿环节极点不同情况下的DC−DC变换器输出阻抗,且曲线3的极点要小于曲线4。对比4 条曲线可以发现,高频补偿环节提高了虚拟负电感的有效范围,该范围取决于补偿环节的极点大小。
根据式(4)、式(9)和式(12)建立了变换器−滤波器−恒功率负载的级联系统等效模型,以便分析系统的稳定性。级联系统等效模型如图4所示。

图4 级联系统等效模型Fig.4 Equivalent model of cascaded system
根据图4 所示系统模型,得出滤波器输出电压uc(s)为
其中


图5 理想情况下和补偿后阻抗比奈奎斯特图Fig.5 Nyquist diagram of impedance ratio under ideal conditions and after compensation
2.3 高频段虚拟电感的辨识和整定
考虑到数字控制器和采样电路等方面的影响,实际工程中DC−DC变换器远比理论分析复杂,实际的变换器输出阻抗与理论分析也存在差异。因此,应用虚拟负电感策略需要对实际虚拟负电感进行辨识并调整。图6 为DC−DC 变换器离网情况下的输出阻抗辨识电路。利用可编程电子负载产生交流电流,检测变换器输出电压的交流分量,进而求出变换器输出阻抗。

图6 阻抗检测电路Fig.6 Impedance detection circuit
变换器的输出阻抗为
检测频率处虚拟负电感大小为
式中,Lω为DC−DC变换器的虚拟负电感检测值。
在参数辨识过程中,阻抗计算误差还会受到检测设备误差和人为计数误差的影响。为了减小阻抗辨识过程中的偶然误差,需要采用估计算法对输出阻抗进行估计。考虑到实际阻抗为固定且未知的参数,最大似然估计法是渐近无偏的,当样本个数足够多时,最大似然估计法得到的参数估计值和真实的参数值在很大概率下是非常接近的。因此,本文采用最大似然估计来提高变换器输出阻抗值的计算精度。
设虚拟负电感计算值样本为(Lω1,Lω2,…,Lωn),由于偶然误差符合正态分布,计算值样本的概率密度为
式中:μ为虚拟负电感的均值;σ为总体方差;k=1,2,…,n,n为自然数。
似然函数为
通过对似然函数取对数并使其导数等于0,可求出正态分布最大值对应的参数值,即分布均值。分布均值即为虚拟负电感的估测值,可表示为
实际参数辨识分为虚拟负电感值测量和最大似然估计两部分。工程实际中通过电子负载在直流负载电流中叠加交流扰动,检测电源电压来计算电源输出阻抗。为了保证最大似然估计的精确度,每增加6组测量值进行一次参数估算,并与增加样本前的估值进行比较。当两者误差小于1%时,停止测量和参数估算,具体流程如图7所示。

图7 高频段虚拟电感的辨识Fig.7 Identification of high-frequency virtual inductance
当虚拟负电感的估测值与设定差异较大时,需要通过电感缩放系数进行调整
式中,α为电感缩放系数,且α>0。
3 实验验证
为验证虚拟负电感控制的高频段参数整定方法,搭建了Starsim HIL 实时在环系统的实验平台,如图8所示。由Starsim HIL实时在环系统硬件模拟直流微电网拓扑,仿真步长为1 μs。采用DSP实现虚拟负电感控制算法,开关频率为10 kHz,采样频率为10 kHz。实验拓扑采用3台Boost变换器作为电源,以及1 台LC 滤波器和1 台永磁同步电机,参数如表1和表2 所示。3 台Boost 变换器的容量比为2∶2∶1。实验中利用示波器直接记录变换器电压和电流波形,利用DSP保存电机转速信息并生成调速曲线。

表2 线路阻抗及电机的实验参数Tab.2 Line impedance and experimental parameters of motor

图8 实验装置及拓扑Fig.8 Experimental device and topology
3.1 虚拟电感的辨识和整定实验
本文采用35 Ω的负载电阻,并用可控电子负载产生交流幅值为4 A、频率为3 260 rad/s的交流电流。图9 为变换器的输出电压和电流。由图9 可以看出,变换器输出电压为671 V 的直流电压并叠加幅值7.18 V 的交流电压。变换器输出电流包含19.2 A 的直流量和幅值为4 A 的交流量,由此可计算得出阻抗幅值为1.8。经电压超前电流13°,可以计算得出变换器在3 260 rad/s 处的电阻和电感分别为1.75 Ω和−124.2 μH。
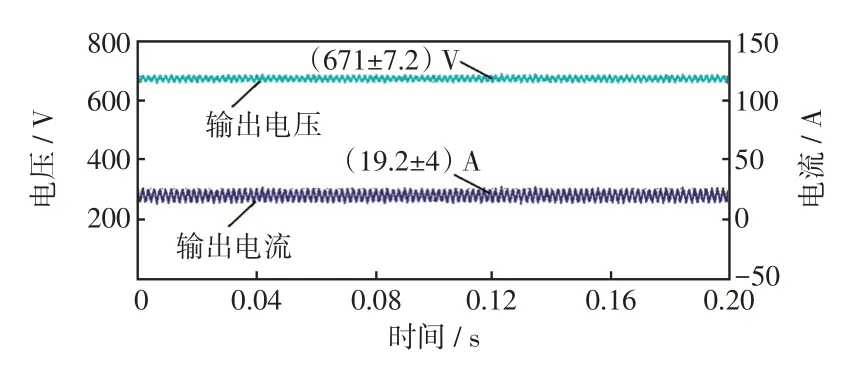
图9 变换器输出电压和电流Fig.9 Output voltage and current of converter
由于单次测量存在较大的随机误差,本文通过改变交流电流大小测得42组数据,如表3所示。用最大似然估计得出虚拟负电感为120.3 μH。最后,可以通过调整电感放大系数得到需要的虚拟负电感为−100 μH。

表3 虚拟负电感辨识值Tab.3 Identified values of virtual negative inductance
3.2 电容电压振荡实验
实验中3 台DC−DC 变换器的虚拟负电感不采用高频段补偿,永磁同步电机由空载突变为41.9 kW,观察电机和电网的电压变化。图10 为电容电压振荡实验波形。

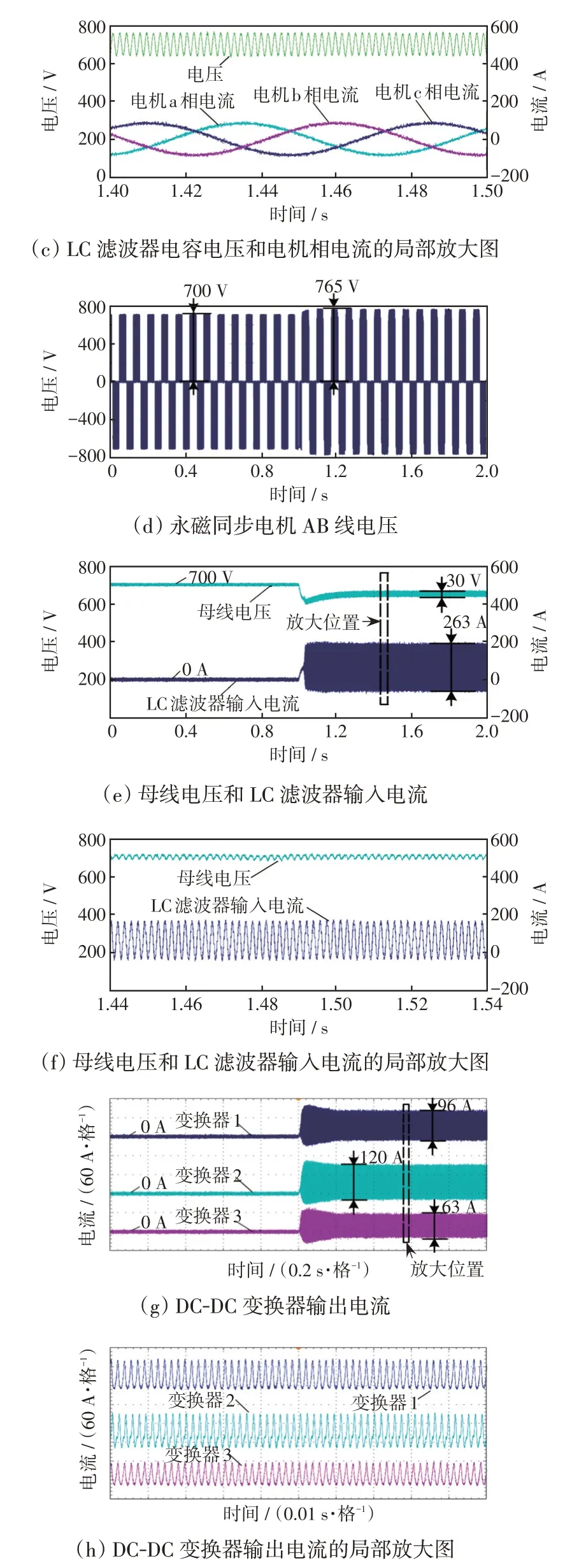
图10 电容电压振荡实验波形Fig.10 Experimental waveforms of capacitor voltage oscillation
由图10 可以看出,负载突变后,永磁同步电机依然稳定运行在200 r/min,但LC 滤波器的电容电压发生振幅为42 V 的振荡。图10(d)中电容电压振荡造成电机线电压升高,增加了变频器开关的电压应力;图10(e)−(f)中直流电压振荡会传递到母线电压,电压振幅为15 V;图10(g)−(h)中,虽然母线电压振幅较小,但会造成较大的DC−DC变换器电流振荡。
3.3 直流电压振荡抑制实验
在3 台DC−DC 变换器的虚拟负电感控制中增加高频段补偿,永磁同步电机由空载突变为41.9 kW,观察电机和电网的电压变化。图11 为直流电压振荡抑制实验波形。可以看出,负载突变后,永磁同步电机依然稳定运行在200 r/min,采用高频段补偿后,LC滤波器的电容电压、母线电压和DC−DC变换器电流均未发生振荡,变换器输出电流基本按照容量分配。对比电容电压振荡实验和直流电压振荡抑制实验2个实验,可以得出虚拟负电感控制的高频段补偿算法可以有效抑制恒功率负载引起的电压振荡。

图11 直流电压振荡抑制实验波形Fig.11 Experimental waveforms of suppressing of DC voltage oscillation
4 结 论
本文以工业园区直流微电网为研究对象,详细分析了恒功率负载引起直流电压振荡的机理,提出了虚拟负电感控制的高频段补偿策略和参数整定方法。通过理论分析和实验验证得出以下结论。
(1)恒功率负载的负阻抗特性会降低直流微电网电压稳定性。增大滤波器电容和减小滤波电感能显著提高系统稳定性和容纳CPL的功率上限,而下垂系数和电容电压对稳定性的影响更加复杂,并非简单的线性关系。
(2)虚拟负电感可以有效抵消部分滤波电感的不利影响,提高系统带恒功率负载的能力和稳定裕度。
(3)利用双极点−双零点补偿网络对高频段进行补偿,增大了虚拟负电感的有效作用范围,可以有效抑制直流电压振荡。
(4)离线参数辨识和最大似然估计检测增强了将虚拟负电感参数整定方法应用于实际工程的可行性。
猜你喜欢
黑龙江电力(2017年1期)2017-05-17
环境科技(2016年5期)2016-11-10
现代工业经济和信息化(2016年8期)2016-05-17
电测与仪表(2016年24期)2016-04-12
西部广播电视(2015年10期)2016-01-18
新高考·高一物理(2015年6期)2015-09-28
现代电生理学杂志(2015年3期)2015-07-18
试题与研究·中考物理(2014年3期)2015-05-11
电测与仪表(2015年19期)2015-04-09
系统工程学报(2015年2期)2015-02-28