基于深度学习的动态主用户频谱感知算法*
2024-02-17 12:52李新玉赵知劲
电子技术应用 2024年1期
李新玉,赵知劲,2
(1.杭州电子科技大学 通信工程学院,浙江 杭州 310018;2.中国电子科技集团第36 研究所 通信系统信息控制技术国家级重点实验室,浙江 嘉兴 314001)
0 引言
随着5G 通信技术的发展和无线通信业务的飞速增长,频谱资源处于供不应求的状态。认知无线电(Cognitive Radio,CR)[1]的提出缓解了频谱资源紧张的局面,频谱感知(Spectrum Sensing,SS)[2]是认知无线电的关键技术,它允许次用户(Secondary User,SU)使用空闲的授权频谱。静态主用户(Primary User,PU)的频谱感知算法已经得到深入研究,静态主用户是指感知阶段主用户状态保持不变,即始终活跃或者始终沉默,而实际场景中,感知过程中主用户可能随机到达或者随机离开。当主用户状态发生变化时,频谱感知算法性能会受到影响。因此,研究在感知期间主用户的状态发生变化的频谱感知算法具有很强的实际意义。
文献[3−12]研究了基于模型驱动的动态主用户的频谱感知。文献[3−4]考虑主用户动态到达的情况,文献[5−7]研究了主用户随机到达和随机离开的时间服从泊松分布的频谱感知,文献[8−10]采用马尔可夫链建模PU 的随机出现和离开,研究了动态频谱主用户频谱感知,文献[11−12]研究了感知期间PU 状态发生2 次变化的动态频谱感知。以上动态主用户的频感知算法,其检测统计量的设计都依赖人工特征,检测性能远低于静态主用户检测,尤其在低信噪比下的检测性能有待提升。
深度学习(Deep Learning,DL)[13]的突破性发展,使基于深度学习的频谱感知成为研究热点。将静态主用户的频谱感知建模成二分类问题[14−21],利用大量信号和噪声样本训练得到频谱感知分类器,这种数据驱动的算法对静态主用户检测性能优于传统模型驱动的频谱感知算法。文献[14−17]训练卷积神经网络(Convolutional Neural Network,CNN)得到频谱感知器。文献[14]采用接收样本的协方差矩阵作为特输入训练网络,实验结果显示此类算法性能优于能量检测算法,该算法无需任何先验信息,是盲阈值设置算法。为了提高信道衰落环境下的频谱感知性能,文献[15]将信号循环平稳周期图作为特征,通过对抗性训练,获得鲁棒性较强的CNN 检测器。文献[16]采用CNN 提取通过时序信号编码得到的图像特征,提高了低信噪比下算法对主用户信号的检测概率。文献[17]使用样本的协方差矩阵作为输入,以后验概率作为损失函数。但浅层CNN 特征提取能力有限,为了避免网络层数增加导致的梯度弥散和梯度爆炸问题,文献[18−20]选择残差网络作为特征提取器进行频谱感知。文献[18]将归一化的信号功率谱作为残差网络的输入,使用8 种调制信号和噪声训练残差网络,得到的模型泛化能力较好,对于训练集中没有的主用户信号也可以保持较高的检测概率。文献[19]将小波变换的时频矩阵作为残差网络的输入,性能优于CNN 作为特征提取网络的算法。文献[20]将信号IQ 路采样作为残差块输入,训练得到的模型性能优于CNN 算法和能量检测算法。由此可见,残差网络对静态主用户样本的拟合效果要优于普通的CNN。文献[21]利用卷积注意力模块(Convolutional Block Attention Module,CBAM)实现静态主用户场景下的频谱感知,进一步提高了低信噪比下的检测概率。
以上算法利用大量信号样本训练特征提取网络,智能提取了复杂通信场景中接收样本的特征,实现了静态主用户频谱感知,但基于深度学习的动态主用户的频谱感知研究不多。文献[22]将多个时隙主用户信号的能量作为特征提取网络的输入,利用CNN 和CBAM 提取动态主用户信号的特征,仿真结果表明该算法性能优于加权的能量检测算法。但该算法将多时隙能量作为网络输入破坏了原始数据的动态特征,采用多时隙样本会限制实际部署。现实场景中,无法预知主用户到达时间和离开时间,主用户随机到达得越晚或者离开得越早,接收到信号中噪声越多,现有算法很难提取到动态主用户的特征,无法准确检测到主用户的存在。针对该问题,本文从去噪的角度出发,假设主用户到达和离开的时刻服从均匀分布,提出基于残差收缩注意力机制的动态主用户的频谱感知算法(DRSN_CAM),将深度残差收缩网络(Deep Residual Shrinkage Network,DRSN)[23]作为特征提取器,提高模型的抗噪性能;采用协调注意力模块(Coordinate Attention Module,CAM)[24]捕获动态主用户特征的长距离依赖关系,进一步提高模型对动态主用户特征的提取能力。
1 DRSN_CAM 频谱感知算法
1.1 动态主用户状态建模
在一个感知时隙内,主用户随机离开和随机到达的情况如图1 所示。

图1 主用户的两种状态
其中,(a)表示目标频谱上原本存在主用户,但在某个时刻,主用户随机离开;(b)表示感知期间,主用户随机出现在目标频谱上。N表示样本长度,N0(0 <N0≤N−1)表示主用户随机离开的时刻,N1(0 ≤N1<N−1)表示主用户随机接入的时刻,Ni(i=0,1) 服从均匀分布。根据主用户是否存在将频谱感知建模成二分类问题,式(1)和式(2)表示主用户存在情况,即频谱繁忙,用假设N1表示;式(3)表示主用户不在,即频谱空闲,用假设N0表示;y(n) 为次用户接收到的基带信号;u(n) 是服从均值为0、方差为σ2μ的独立同分布的高斯白噪声,x(n)=m(n)*h(n),m(n)是主用户信号,h(n)是信道增益,且m(n)与u(n)相互独立,“*”为卷积。
1.2 DRSN_CAM 算法模型
DRSN_CAM 算法的网络模型如图2 所示,其中深度残差收缩网络(DRSN)和协调注意力机制(CAM)是主要模块。前2 个卷积层提取动态主用户信号的浅层特征;DRSN 模块中的卷积层和残差结构进一步提取样本的高维特征,自适应地滤除冗余的噪声特征,保留动态主用户信号特征,提高模型的抗噪性能;采用CAM 聚合动态主用户每个通道的垂直方向和水平方向的特征,获取特征的长距离依赖;分类层将特征维度映射为类别维度,并输出判决结果。

图2 DRSN_CAM 网络结构
1.2.1 深度残差收缩模块DRSN
在实时感知阶段,在H1假设下,因为主用户的随机出现和随机离开,相对于主用户始终保持活跃的情况,收集到的样本会含有更多的噪声。为了避免噪声特征影响模型提取动态主用户特征,采用DRSN 作为主要的特征提取器,DRSN 模块由2 个RSBU1 和2 个RSBU2 堆叠得到,与RSBU1 相比,RSBU2 中多出的1×1 的卷积层的作用是增加该模块的输出通道维度。利用式(4)所示的软阈值法,DRSN 滤除噪声特征,保留动态主用户特征。阈值τ是通过模型训练得到的,τ为较小的正值,且每个通道都有不同的阈值。将输入特征S的绝对值小于阈值τ的特征滤除,将绝对值大于阈值的特征朝着零收缩,得到输出特征V。
利用收缩模块RSBU1 和RSBU2 中的shrink 网路将提取到的冗余噪声特征置零,避免其干扰模型提取动态主用户信号特征,提高模型的抗噪性。式(5)和式(6)所示的RSBU1 和RSBU2 获得阈值的过程如下。
根据式(5)对输入特征的每个通道取绝对值,其中c表示第c个通道,再对各通道的特征值做全局平均池化(Global Average Pool,GAP)得到的特征记为A;在另一条网络支路中,由式(6)将经过平均池化之后的特征通过全连接层降维得到一维张量,再依次进行批量归一化(Batch Normalization,BN)、非线性激活ReLU 操作,最后再通过Sigmoid 层,获得收缩参数α(0 <α<1),其中σ表示Sigmoid 层,则阈值为τ=α×A。
1.2.2 协调注意力机制模块CAM
CAM 由两个方向处理模块和1 个特征融合模块组成。DRSN 模块的输出特征为R C×H×W,其第c个通道,(i,j)处的特征值为rc(i,j)。方向处理模块1 利用2 个全局池化层聚合不同方向的动态主用户特征,捕获每个通道特征的长距离依赖关系,定位动态主用户特征的位置信息,得到单个通道c在高度h和宽度w处的输出和分别如式(7)和(8)所示,得到输出的特征张量为。
特征融合模块通过拼接Zh和Zw,降维及非线性处理,进一步融合每个通道不同方向的特征,得到中间特征FC/r×1×(W+H)。方向处理模块2利用2 个一维卷积分别提取水平和垂直方向的特征,得到gh和gw。最后得到增强特征张量R'C×H×W,其通道c的特征rc'(i,j)如式(9)所示。
1.3 模型训练和测试
DRSN_CAM频谱感知算法方案如图3所示,算法分为线下模型训练和感知测试两部分。为了增大卷积感受野,利用样本的I路和Q路数据得到维度为32×32矩阵I和Q,所以模型输入张量维度是2×32×32。模型的输出如式(10)所示,其中Gθ(⋅)表示参数为θ的DRSN_CAM网络,表示s(k)的假设H1为真的概率,表示s(k)的假设H0为真的概率,且满足。
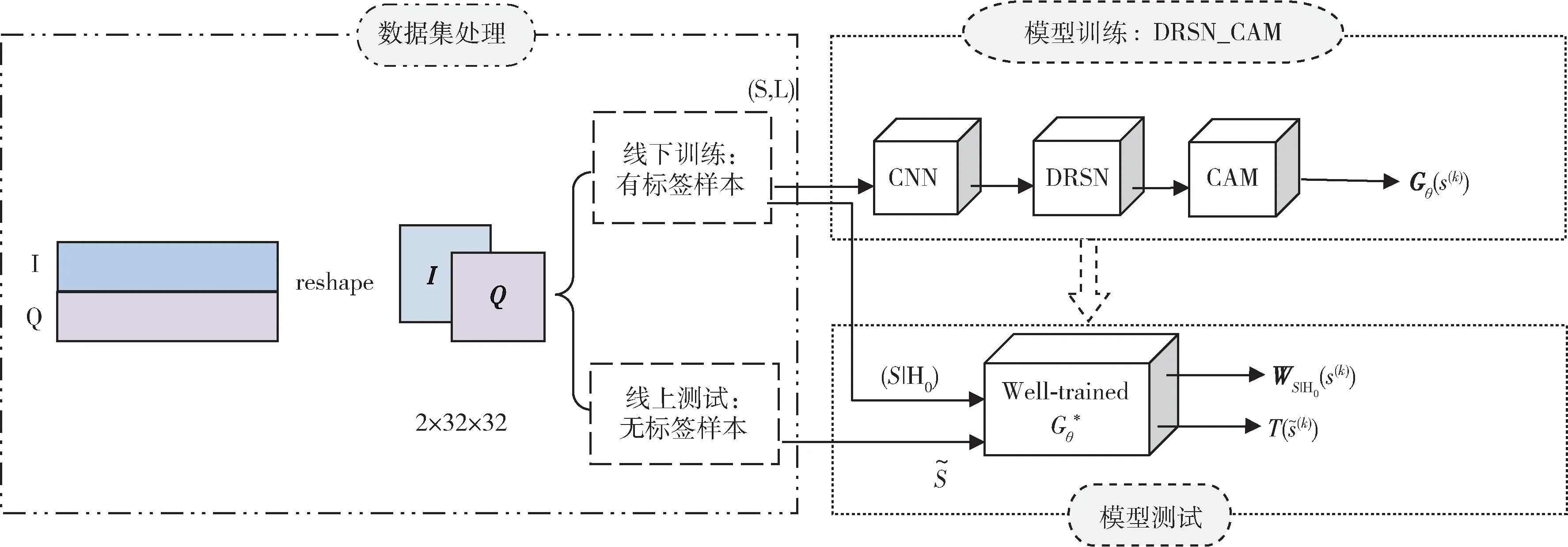
图3 DRSN_CAM 频谱感知
本文算法的检测统计量T(s(k)) 如式(11)所示,表示训练好的网络判断s(k)的假设为Hi的概率,在训练阶段P(H0)=P(H1)=0.5。
模型测试阶段,首先确定感知门限,将t个噪声样本输入到训练好的网络Gθ*(⋅)中,获得一组检测统计量并且降序排列得到向量,给定Pf,向量中的第Pf×t个元素值作为检测门限γ,本文t取1 000。将样本输入训练好的网络进行测试,根据式(12)判断PU 是否存在。
2 仿真分析
本节仿真分析本文的DRSN_CAM 算法、基于残差网络的ResNet 算法[20]和基于卷积注意力机制的CBAM算法[22]对动态主用户的检测性能。
2.1 数据集
使用MATLAB 软件生成BPSK、QPSK、64QAM 和16QAM 4 种主用户信号。训练集和验证集的信号样本的信噪比从−20 dB 到20 dB,步长为2,主用户随机到达和主用户随机离开的两种情况;训练集中,每种信号每dB 下生成100 个样本,共计16 800 个信号样本;验证集中每种信号每dB 下10 个样本,共计1 680 个信号样本;训练集和验证集中的噪声样本与信号样本数相同,各为16 800 个和1 680 个。测试集共计9 600 个信号样本,信噪比从−20 dB 到10 dB,步长为2,主用户随机到达和随机离开的2 种情况下,每种信号每dB 下生成75 个样本。
2.2 算法性能分析
2.2.1 超参数的设置
训练集和验证集中的主用户信号,到达时刻N1(0 ≤N1<N−1) 和离开时刻N0(0 <N0≤N−1) 均服从均匀分布,模型训练超参数设置,训练轮数26,学习率设为0.000 001,批量大小为128,优化器选择Adam。
2.2.2 DRSN_CAM 算法对主用户动态程度的鲁棒性
主用户随机到达的点N1∈[0,(1 −d) ⋅N) 和随机离开的点N0∈(d⋅N,N],服从均匀分布,其中动态因子d用于控制主用户到达和离开的时刻。d的取值为0、10%、25%、50%、75%和100%时,PU 的动态程度依次减弱,其中d=0 表示主用户状态完全随机,d=100%表示感知期间主用户始终存在。当信号长度为1 024,虚警概率为0.06 时,DRSN_CAM 算法对6 种不同动态程的主用户的检测性能曲线如图4 所示。横坐标SNR 是信噪比,纵坐标是不同信噪比下DRSN_CAM 算法对动态主用户的检测概率。

图4 不同PU 状态下DRSN_CAM 算法的检测概率
由图4 可知,当d>50%时,DRSN_CAM 算法性能比较接近,当SNR 大于−8 dB 时,检测概率都达到了94%以上。随着主用户的动态程度逐渐增加,DRSN_CAM算法的检测概率逐渐降低,这是因为,随着d的减小,主用户动态程度增加,而主用户停留的时间就越短,样本数据包含的信号特征就越少,因此,算法对主用户的检测概率就会降低。当d取100%、75%、50%和25%,信噪比为−10 dB 时,检测概率依次可以达到89.1%、86%、79%和63.5%。当d取10%和0 的情况下,检测概率始终无法达到100%,这是因为部分样本主用户停留在目标频谱上的时间非常短暂,模型无法检测到;此时,即使次用户接入频谱,与主用户碰撞的可能性也很小,因为主用户停留的时间极其短暂。
2.2.3 算法性能对比
对比算法ResNet[20]和CBAM[22]模型训练的超参数与本文算法相同,将CBAM 网络及其输入采用样本的IQ 路信号和信号的能量值的算法分别称为CBAM_IQ算法和CBAM_Energy 算法。样本长度为1 024,虚警概率Pf=0.1,d=25% 和d=75%,不同信噪比下,DRSN_CAM、ResNet、CBAM_IQ 和CBAM_Energy 4 种算法对两种不同动态程度的PU 的检测概率如图5 和图6 所示。

图5 4 种算法性能对比(d=25%)
由图5 和图6 可知,在主用户两种动态程度情况下,DRSN_CAM 算法性能都是最佳的,ResNet 算法性能优于CBAM_IQ 和CBAM_Energy,CBAM_Energy 算法性能最差。当d=25%,信噪比为−10 dB 时,DRSN_CAM 算法、ResNet 算法、CBAM_IQ 算法、CBAM_Energy 算法的检测概率分别为78.3%、54%、28%和15.5%;当d=75%,SNR=−10 dB 时,DRSN_CAM 算 法、ResNet 算 法、CBAM_IQ 算法、CBAM_Energy 算法的检测概率分别为95.6%、78.3%、37.6% 和16.6%。这是因为DRSN_CAM算法在残差网络中添加了阈值软化的收缩模块,可以滤除冗余的噪声特征,保留信号特征,提高模型的抗噪性能,所以对淹没在噪声中的动态主用户的检测概的动态主用户的检测概率更高;而ResNet 算法的残差网络的特征提取能力比CBAM 算法的卷积注意力机制要强,所以ResNet 算法性能优于CBAM算法;CBAM_Energy 算 法检测性能比CBAM_IQ 算法性能差,这是因为CBAM_Energy 算法将样本能量值输入到网络中训练,不利于模型提取样本的动态特征。当d=50%,Pf=0.1,信号长度为1 024,主用户随机到达时间点N1和随机离开时间点N0服从均匀分布时,N1∈[0,50%N),N0∈[50%N,N);当N0和N1服从泊松分布时,其均值为256 和768。用N0和N1服从均匀分布的数据集训练网络,4 种算法对N0和N1服从泊松分布和均匀分布的主用户信号的检测概率如图7 所示,其中算法a_u 和a_p 分别表示算法a 对N0和N1服从均匀分布和泊松分布的两种主用户信号的检测。
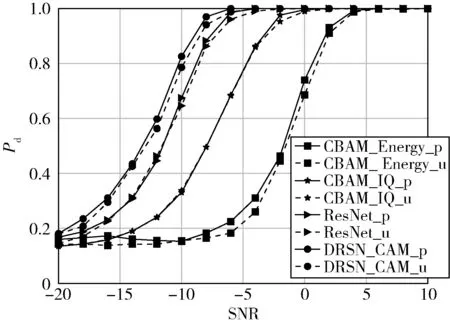
图7 N0 和N1 的分布对算法性能影响(d=50%)
由图7 可见,DRSN_CAM 算法性能优于3 种对比算法,当信噪比为−8 dB 的时候,DRSN_CAM 算法对均匀分布样本和泊松分布样本的检测概率分别为94.1%和97%。可见,主用户状态变化点N0和N1服从的分布对检测性能的影响并不大。
3 结论
针对现有频谱感知算法对动态主用户检测效果不佳的问题,本文研究提出DRSN_CAM 算法。利用DRSN 模块提取动态主用户样本特征,收缩模块滤除冗余的噪声特征,提高了模型的抗噪性能;CAM 模块沿着水平和垂直方向聚合动态主用户每个通道的特征,提高了模型对动态主用户的检测概率。大量实验结果证明DRSN_CAM 算法对动态主用户检测性能优于对比算法。
猜你喜欢
卫星应用(2022年7期)2022-09-05
卫星应用(2022年3期)2022-05-23
卫星应用(2022年1期)2022-03-09
中学生数理化·高一版(2021年2期)2021-03-19
空间科学学报(2021年6期)2021-03-09
环球慈善(2019年6期)2019-09-25
测控技术(2018年7期)2018-12-09
知识经济·中国直销(2018年8期)2018-08-23
数学学习与研究(2017年3期)2017-03-09
中国老区建设(2016年1期)2016-02-28