GPS天线自激干扰导致车载导航失效的分析与处理
2024-02-23 01:38孙青丁永
汽车与驾驶维修(维修版) 2024年1期
孙青、丁永
(扬州航盛科技有限公司,扬州 225009)
0 引言
我国国民经济产业结构中,汽车产业一直是战略性、支柱性的产业,在推动工业发展,加快现代化建设进程方面,发挥着不可替代的重要作用。而全球定位系统(Global Positioning System,GPS)的出现和不断成熟,也给汽车产业的发展带来了极大的便利。GPS的作用是为了利用GPS技术配合电子地图来进行行车定位、导航,能让驾驶员随时随地知晓本车的确切位置,方便准确地知道去往目的地最短或者最快的路线。
本文以实例介绍了GPS在车载导航系统应用中出现GPS信号失效故障的分析过程,对车载导航的实际应用及GPS天线及主机的系统有极大的设计及分析参考意义。
1 全球定位系统
全球导航卫星系统(Global Navigation Satellite System,GNSS)是一种利用导航卫星进行实时定位的系统[1]。而GPS则能够依靠卫星来对于时间和距离进行测量,从而在全球范围内完成定位,它具有非常强的保密性和抗干扰性。
1.1 车载GPS导航仪系统的组成
GPS导航系统的组成包括GPS天线和汽车导航系统。其中,汽车导航系统包含GPS信号接收模组、处理器、显示屏、音频处理及扬声器、按键和触摸屏、存储芯片以及地图导航软件等多个部分。随着我国城市间交通越来越发达,人们对车载导航的需求越来越多。于是,越来越多的问题出现,如找不到目的地、交通阻塞和路线规划不满足车主需求等。GPS车载导航系统,不仅解决了以上问题,同时还能为人们出行提供便捷的服务,是现代每个车主必不可少的出行工具。
1.2 GPS卫星导航系统的四大要素
GPS卫星导航系统的四大要素包括卫星信号、信号传播、信号处理和地图数据库。卫星信号是由环绕地球的24颗卫星以一定的格式发射,在传播过程中经过电离层、对流层然后被GPS接收机接收。接收机根据已编好的程序对信号的各种误差进行消除与减弱处理,并计算汽车位置坐标与行驶速度等数据,最后与存储在系统中的地图数据库相匹配,进行查询未知地点,选择最佳路径等,从而指导汽车行驶[2]。
1.3 本实例车载导航系统的应用
本文中的车载导航系统,以Linux嵌入式系统为基础,利用基于ARM核的A7作为开发的硬件平台,设计了系统各个功能模块的电路图,包括GPS定位模块、显示模块、陀螺模块以及存储模块、MCU模块、CAN网络模块、WIFI模块和BT模块、音频处理模块、功放模块及各个接口模块等[3]。同时,该导航系统将电子地图存储在系统的闪存中,可以自动下载地图并对地图进行更新。本车载导航系统的一个重要功能,即实现导航、定位以及线路规划的功能。
2 车载GPS自激振荡
本系统中故障现象为GPS导航系统主机不搜星,经工程师现场及实验室测量排查,得出结论为车载GPS自激振荡,导致GPS导航系统主机搜星异常。
2.1 自激振荡的定义
自激振荡是指不外加激励信号,即没有外部信号的情况下,而自行产生的恒稳而持续的振荡。通俗来说,就是在放大器的输入端不施加输入信号,输出端仍有一定的幅值和频率的输出信号,这种现象就是自激振荡[4]。
2.2 车载GPS自激振荡的原理
自激振荡电路通常由电源、放大器、滤波器和振荡元件组成。其中,振荡元件如振荡管或晶体管提供了正反相互作用的反馈电路,使得电路能够自我振荡。当振荡元件产生了一个振荡信号,放大器会将这个信号放大,而滤波器会将放大后的信号进行频带限制,放大和频带限制后的信号会反馈到振荡元件上,从而形成一个正反相互作用的闭环,使得电路能够产生自激振荡[5]。
3 GPS搜星失效故障的分析与处理
3.1 GPS失效故障的现象
车载导航GPS整车检查时,发生车载导航主机GPS不搜星。实车上尝试做以下排查确认。
第一步:直接用电脑在车上测试故障A天线,结果搜星正常。
第二步:将故障天线和主机与正常产品进行ABA交叉测试,结果搜星正常。
第三步:将故障主机与故障天线拆下后放检测台上测试,结果搜星正常。
第四步:在故障车上用手去触摸故障天线,结果触摸后搜星恢复正常。
第五步:用频谱分析仪在实车上测量故障天线及导航仪,发现在搜不到星车机上GPS天线的1 575.00 MHz频段范围测量到-45.0 dBm的干扰。而在故障消失时测试,此时环境的干扰强度在-80.0 dBm。因干扰导致车机GPS功能失效,会使搜星失败,无法捕获到4颗以上(含4颗)卫星进入导航模式为车载导航系统提供位置信息。该故障车机在实验室中台架测试GPS搜星正常,GPS定位功能正常。
3.2 GPS失效故障的分析
天线分为接收、发射两种类型。接收天线分为有源(电源)和无源(电源)两种[5]。无源接收天线不会发生自激振荡干扰,但有源接收天线,因内部有一个前置放大器及滤波器等电路,可能发生自激振荡干扰。该实例中的车载导航仪使用的即有源集成天线。
因GPS天线内部增益过大,天线产生自激干扰,导致的典型故障现象为车载导航仪定位失效。有源接收天线发生自激振荡干扰的具体过程,当前置放大器的反馈电路(自动增益控制AGC电路)不能正常控制增益且滤波器性能下降不能有效滤除杂波,使得信号被一直放大直到放大器阻塞,致使有用的信号也不能通过放大器,所以GPS天线无法正常工作。
3.2.1 天线增益测试
通过排查的现象和结果,将不搜星天线与搜星天线的增益参数在实验室进行测量搜集并对比:3根搜星天线的增益测量数据分别为:28.1 dB、27.9 dB和28.3 dB;3根不搜星天线的增益测量数据为29.9 dB、30.0 dB和30.1 dB。
根据GPS模组芯片提供的增益标准可知,GPS模组芯片输入端增益标准<44.0 dB,根据GPS天线厂家提供的增益标准是(28.0±2.0)dB,车机天线输入芯片LNA电路(信号放大滤波器)手册提供的增益标准为18.5 dB。由此可得出(GPS天线+LNA)增益最小增益为46.0 dB,大于GPS芯片输入增益标准(<44.0 dB),至少偏大2.0 dB。因此,天线增益过大是导致自激振荡干扰的主要原因。
3.2.2 增益误差分析
GPS天线前置放大器电路(图1)中R5、R6位置的阻值误差,对天线增益的误差起关键作用。R5阻值为470 Ω(误差±5%),R6阻值为22 Ω(误差±5%),增益为28.0 dB,因此总增益误差为R5误差和R6误差之和,即±5%。由此得出总增益为(28.0±2.8) dB。该增益的误差范围较大,增益上限为30.8 dB。图1中前置放大电路中的AGC电路不能正常控制增益,该滤波器电路不能有效去除干扰杂波信号。
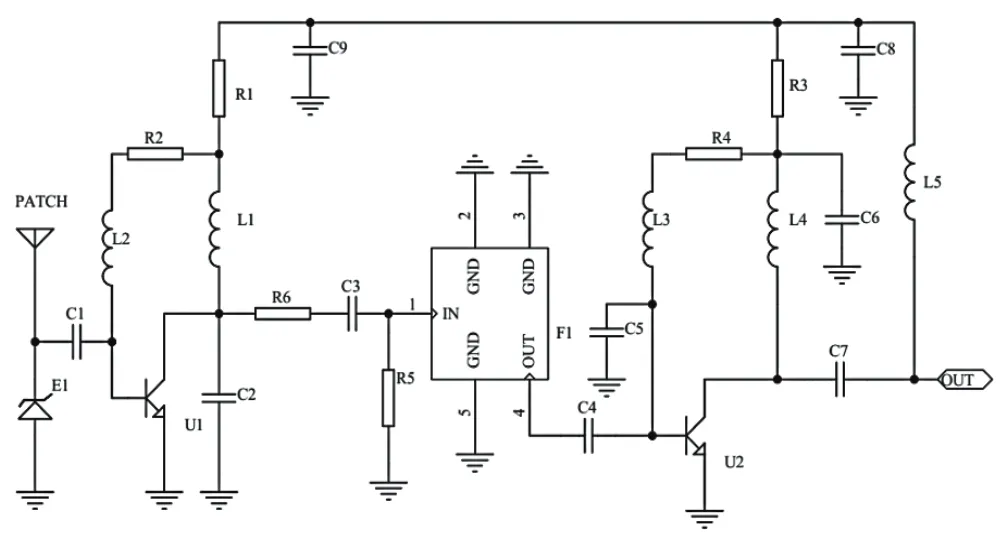
图1 GPS天线前置放大器电路
3.2.3 原因复现验证
验证条件:GPS信号发生器一台,发射GPS信号频率为1 575.42 MHz,发射功率为-85.0~20.0 dBm,车载导航系统主机供电电源为12 V。
用不搜星“天线+主机”进行测试。发射功率为-81.7 dBm时,导航搜星正常;当发射功率加大至-23.4 dBm时,导航不搜星。用手遮挡发射天线(相当于用手触摸天线安装位置的仪表台上方),搜星变为正常。移动GPS天线线束位置后,搜星又变为正常。
进行自激不良再现验证。将信号发生器连接器并接入车载导航主机,使用信号发生器发射出1 575.42 MHz的信号,调整发射功率,直至车载导航系统搜星异常。系统模拟自激时,频谱探测条件:center为1 600.00 MHz,带宽Span为30.00 MHz。异常时,探测干扰信号中包含1 600.00 MHz。
通过验证可知,当信号过大时,会导致GPS天线不搜星;故障天线增益过大,天线产生自激干扰,导致现场不搜星故障发生。当系统在接收过强信号时,天线内部的放大器处于饱和状态,导致导航系统自激。此时的天线回路由原来的正反馈变成负反馈,导航系统会出现无法搜星的异常故障。
进一步分析可得,干扰信号1 600.00 MHz的信号强度大,且在GPS信号频段1 575.42 MHz附近,天线滤波器电路不能将干扰信号滤除,而有用的GPS频点信号不能通过放大器电路。这就导致系统产生了一个1 600.00 MHz的振荡信号,放大器电路同时将这个信号放大,而滤波器会将放大后的信号进行频带限制。放大和频带限制后的信号会反馈到振荡电路中的元件上,从而形成一个正反相互作用的闭环,使得天线电路产生自激振荡。有用的GPS频点1575.42 MHz则未进入到GPS模块电路中。通俗地说,就是GPS天线给自己发送信号放大后再接收,无穷循环。
3.3 GPS失效故障的处理方法
遇到这种因GPS天线自激干扰导致导航系统无法搜星而失效的故障时,可以采取一些临时措施:请天线厂家在产品性能测试环节增加判定天线增益指标标准,由(28.0±2.0)dB的指标修改为26.0~28.0 dB。
如果要永久排除上述问题,需要进行如下措施:天线供应商修改设计,在天线的LNA输入端增加前置滤波器,更好地抑制外界干扰;在GPS天线前置放大器电路设计上,采用误差精度为1%的电阻;对GPS天线中LNA电路进行降增益处理,将接收到的GPS信号进行放大,并自动调整其增益,以达到理想的信号接收质量,达到系统的稳定性。
3.4 优化测量天线增益对比
在天线的LNA输入端电路增加前置滤波器,能更好地抑制外界干扰。图2所示为未增加前置滤波器的天线增益,图3所示为增加前置滤波器的天线增益,可以看出,增加前置滤波后,天线对低频和高频的带外抑制水平提高,天线的抗干扰能力增强。

图2 未增加前置滤波器的天线增益
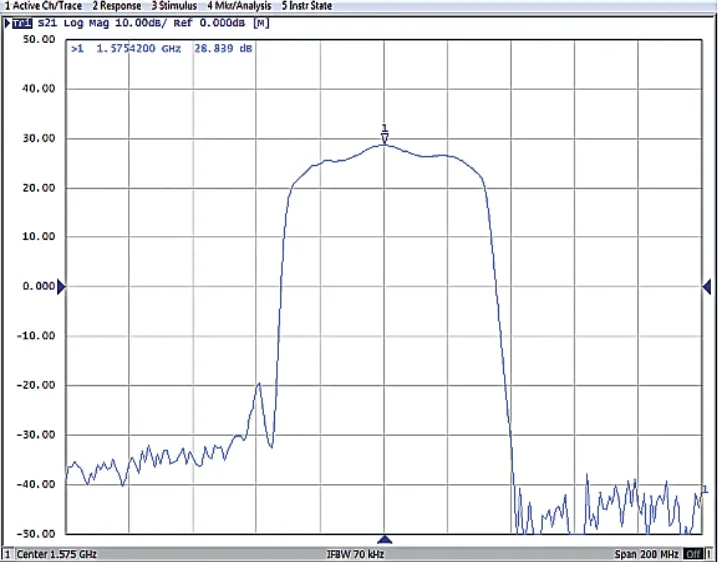
图3 增加前置滤波器的天线增益
4 结束语
如本文所述,如果车载导航系统中发生搜星定位失效,我们在分析该类问题时,GPS天线自激振荡干扰导致的可能性较大。遇到此种情况,在设计中常用的方法为:增加源极负反馈稳定电路;改进偏置去耦电路;确保搭铁良好;调整电路整体布局;以及对电路不匹配采用微调直流工作点等。而本文实例中,则是对电路增益不匹配采用微调增益性能指标,以及调整天线前置放大器电路中的电阻精度,并对GPS天线中LNA电路进行降增益处理,达到系统的稳定性。而且通过验证,在天线的LNA输入端增加前置滤波器,可更好地抑制外界干扰。
猜你喜欢
中国生殖健康(2020年5期)2021-01-18
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
教书育人(2020年11期)2020-11-26
当代陕西(2020年13期)2020-08-24
铁道通信信号(2020年8期)2020-02-06
中国生殖健康(2018年5期)2018-11-06
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
中国惯性技术学报(2017年1期)2017-06-09
中国公共安全(2017年11期)2017-02-06
百科探秘·航空航天(2016年9期)2016-12-01