仿牛鼻鲼机器鱼倒游性能胸鳍结构设计与实验
2024-03-14 03:42余应明曹永辉郝艺伟
水下无人系统学报 2024年1期
李 博 ,余应明 ,曹永辉 ,,郝艺伟 ,潘 光 ,,曹 勇 ,*
(1.西北工业大学宁波研究院 无人航行技术研究中心,浙江 宁波,315048;2.西北工业大学 航海学院,陕西 西安,710072)
0 引言
随着海洋探索和开发需求的增加,自20 世纪90 年代,仿生机器鱼已逐渐成为各高校及科研院所热点研究领域之一。目前,国内外仿生学研究人员普遍按照鱼类的推进部位和特点将仿生机器鱼分为2 种,即身体/尾鳍模式 (body and caudal fin,BCF)和中央鳍/对鳍模式(median and/or paired fin,MPF)[1-2]。综合现有研究结论,胸鳍推进模式具有低速推进效率高、游动稳定性好且机动性优良的特点[3-4];而胸鳍推进模式的仿生机器鱼又可以按照胸鳍鳍条的数目细分为2 类: 单鳍板驱动和多鳍条驱动。毕树生团队[5-9]研制了系列胸鳍摆动推进的工程样机(Robo Ray 1~5),其摆动胸鳍更加有效,游动速度近2 kn,同时经过多次的版本迭代,从外形和游态上更加逼近真实鱼类;邢城[10]设计了基于摆旋驱动单鳍板结构布局的工程样机,分析了摆旋机构的运动机理并对样机的推进性能进行了测试;沈林成等[11]对于多鳍条仿生鱼波动胸鳍进行设计和研究,对鳍条的结构、力学性能和运动规划、控制等方面开展相关研究;武志军[12]则研制了仿晶吻鳐机器鱼,通过偏心轮机构实现多鳍条的波动传递,得到的直线前游和转弯机动实验数据与计算机仿真数据匹配较好;范增等[13]以魟鱼为仿生原型,设计了一款多鳍条波动机器鱼,测试研究了机器鱼最大平均推力为2.8 N,最大游速达121 mm/s。
从以上研究进展可以了解到,单板胸鳍是通过单电机或两电机配合驱动中间机构带动单鳍板,经过对鳍板不同截面的刚度分布进行设计,使得胸鳍拍动时发生变形从而推动水流获得推进力,其推进效率高且游动稳定性好,以往研究大多围绕胸鳍推进机构的设计与优化,如优化前游的推进效率、速度及稳定性,但针对倒游推进性能的研究并不多见;同时由于多鳍条驱动是通过多个电机带动对应鳍条在不同时间规律的上下摆动,形成连续的拍动水流,使得其拥有高机动及倒游特性,但其稳定性能较差并且能耗较高。
文中为兼顾游动稳定性及倒游特点,设计了一种基于胸鳍摆动推进模式的分体式仿生柔体胸鳍结构,并将仿牛鼻鲼机器鱼模型在循环水槽中进行分体胸鳍与完整胸鳍对比测试实验。循环水槽扑动推进实验结果表明,分体胸鳍结构方案随着频率和幅值的增加,向后推力增加明显,并且2 种胸鳍结构前游推力接近,因此为仿牛鼻鲼机器鱼实现高稳定性及高机动性的控制研究提供参考。
1 仿生鱼胸鳍推进机构设计
1.1 生物胸鳍特征分析
胸鳍摆动推进的鱼类以鲼科为代表,其中蝠鲼与牛鼻鲼最为典型(见图1)。此种鱼类身体呈扁平且总体呈菱形,具有一对较大且近似三角形的胸鳍[14];在运动过程中,胸鳍的柔性变形是影响推进效率的最大因素[15],距离身体远端的鳍尖部分变形较大,而鳍根部分变形较小。Schaefer 等[16]通过对胸鳍摆动鱼类的研究,发现鲼科鱼类胸鳍骨架有相似性,即胸鳍骨骼沿展向(即沿翼展方向)呈现放射状,且沿弦向(即沿身长方向)依次排列布局,其刚度分布: 靠近头部钙化严重,刚度更强;远离身体钙化程度越弱,刚度减小;同时胸鳍骨骼之间联结并产生交叉支撑,通过肌肉带动对应骨骼进行灵活变形以及摆动拍水游动。Curet 等[17]分析了蝠鲼胸鳍的外形、肌肉以及骨骼分布,研究表明骨骼沿展向平行排列,每根骨骼在肌肉的带动下可以绕着鳍根转动,并且胸鳍骨骼和肌肉形成交叉支撑结构。钙化的骨骼在胸鳍内部按照放射状排布,其软骨部分由多段桡骨组成,可以绕桡骨关节处做小幅值转动,因此在胸鳍展向体现出一定的柔性。与此同时,各桡骨之间存在交错式的联结以及肌肉的结合,因此整个胸鳍仍会表现出一定的刚度。Salazar 等[18]对黄貂鱼和蝠鲼的骨骼结构进行对比,研究发现黄貂鱼胸鳍骨骼越靠近身体内侧,网状支撑结构越多,而在胸鳍边缘的骨骼更加独立;但蝠鲼的胸鳍骨骼几乎都是交叉支撑结构。Menzer 等[19]针对蝠鲼胸鳍前缘涡以及胸鳍弯曲度进行流体分析,详细分析了蝠鲼游动时胸鳍弦向攻角对推力的影响以及在此条件下所产生前缘涡场的表现形式。从现有对其胸鳍研究的文献资料总结出以下特点: 1) 牛鼻鲼整体外形近似菱形,胸鳍轮廓近似三角形,且前缘至后缘的截面近似Naca 翼型曲线;2) 牛鼻鲼在游动过程中,展向及弦向上分别近似产生正弦波动,通过胸鳍拍动水流从而产生推力;3) 从对现有标本扫描胸鳍骨骼发现胸鳍的钙化分布从内至外逐渐变弱,并且骨骼与肌肉紧密结合,使胸鳍有良好的复合柔性,如图2 所示[16]。
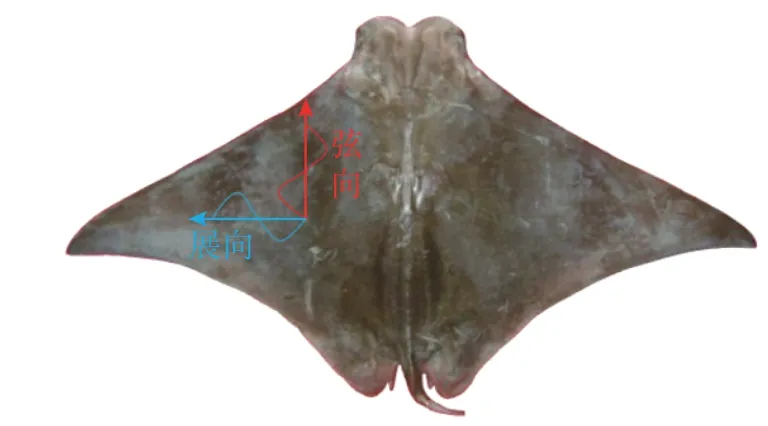
图1 牛鼻鲼标本Fig.1 Cow-nosed ray specimen

图2 生物学骨骼分布Fig.2 Distribusion of biological skeleton
综合考虑以上胸鳍运动特点,以牛鼻鲼胸鳍为仿生对象,并且对胸鳍的结构优化设计进一步测试验证,讨论一种同时具有良好前游推力和倒游性能的胸鳍结构,从而实现仿牛鼻鲼机器鱼在沉船考察、珊瑚礁监测等小空间场景的应用能力。
1.2 胸鳍结构设计
为实现仿牛鼻鲼机器鱼胸鳍的摆动效果,采用双舵机搭配摆旋机构带动胸鳍鳍板的方式,胸鳍鳍板由鳍板骨架和硅胶蒙皮组成,其骨架通过3D打印制得,将完整胸鳍鳍板和分体胸鳍鳍板在摆旋结构固定位置进行同位更换,保证基础结构的一致性;在机械与模型的背部设有六维力/力矩传感器法兰接口,可以实现在实验平台的对接,具体驱动方案如图3 和图4 所示。

图3 仿牛鼻鲼机械鱼模型Fig.3 Robotic cow-nosed ray model

图4 实验模型Fig.4 Experimental model
由于实验平台尺寸的限制,设计以上仿牛鼻鲼机器鱼工程样机模型翼展为0.4 m,体长为0.25 m;现有设计完整胸鳍(即单板柔性鳍板)作为测试对照组,完整胸鳍鳍板(见图5)弦向刚度由不同大小和深度的沟槽实现刚度连续变化,并且在尾缘处分离处理,摆旋机构驱动完整胸鳍结构(见图6),从而实现胸鳍鳍板在拍动过程中展向连续被动弯曲且弦向同样有被动弯曲,这样连续的拍动增加了运动过程中高效的前游推进。

图5 完整胸鳍鳍板结构Fig.5 Structure of complete pectoral fin

图6 摆旋驱动完整胸鳍Fig.6 Swinging drive complete pectoral fin
分体胸鳍鳍板设计由前缘鳍板和后缘鳍板组成(见图7),并且鳍板展向尖部和鳍板弦向设计有多个不同沟槽;为在扑动过程中增加鳍板弦向变形连续性,选择0.6 mm 硅胶作为蒙皮材料贴敷在鳍板上下两侧,构成具有展向连续被动变形和弦向摆旋机构主动驱动带动鳍板被动连续变形的分体胸鳍结构(见图8)。

图7 分体胸鳍鳍板结构Fig.7 Split pectoral fin stucture

图8 摆旋驱动分体胸鳍Fig.8 Swinging drive split pectoral fin
2 水动力实验设计
2.1 实验平台
实验平台为一小型循环水槽,其外形尺寸为6 750 mm×1 805 mm×3 000 mm,试验段截面积尺寸为1 500 mm×600 mm×800 mm,最高水深600 mm;样机身长方向为六维力/力矩传感器X方向,翼展方向为Y方向,垂直方向为Z方向,实验模型布局见图9;将实验模型放置在实验平台后,通过计算机对其进行控制,实现单侧两舵机输出弦向正弦摆动。
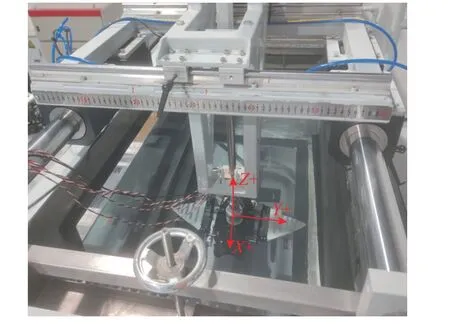
图9 循环水槽实验平台Fig.9 Circulating water tank experimental platform
循环水槽可以提供稳定流速,且其流速范围为0.05~1.2 m/s,水流精度见表1。

表1 循环水槽参数Table 1 Parameters of circulating water tank
由于测试胸鳍尺寸较小,产生推力较小并且推力测量精度较高,因此选用ATI 六维力/力矩传感器型号为SI-125-3,详细参数见表2,其中Fx、Fy、Fz为空间坐标方向的力,Tx、Ty、Tz为空间坐标方向对应的力矩。

表2 六维力/力矩传感器参数Table 2 Parameters of six dimensional force/torque sensor
2.2 实验方案设计与测试
摆旋机构是实现两驱动舵机与鳍板连接及传动的重要组件,平面运动如图10 所示。所有零件的关系: 零件1 与零件3 通过旋转副连接;零件3与零件4 通过圆柱副连接;零件4 与零件5 通过旋转副连接;零件5 与零件2 通过圆柱副连接。此机构运动构件n=5,空间每个构件自由度为6,pi(i=1···5)为该构件空间约束数,因此可以计算摆旋机构的空间自由度为

图10 摆旋机构二维原理图Fig.10 Two-dimensional diagram of swing structure
经过计算得到摆旋机构空间自由度为2,与运动输入数相等,因此采用两舵机输入时可以确定各构件的运动及位置。
在实验测试中,通过分别控制舵机1 与舵机2 转动带动摆旋机构(见图10)运动且两舵机转动角度随时间保持一定角度值(以下称为相位差),从而带动胸鳍鳍板形成对应相位差角度的攻角,在连续运动作用下,鳍板表现为正弦摆动推水;在此过程中,当舵机1 先于舵机2 转动且保持一定相位差则该胸鳍产生向前推力;反之,舵机2 先于舵机1 转动且保持一定相位差则该胸鳍产生向后推力。
为实现胸鳍连续拍动,对两舵机的运动控制需按照如下方程进行描述
式中: θ1(t)与 θ2(t)分 别为在时 刻t时一 级摆杆和二级摆杆在其回转平面中偏离中心位置的角度值;A1和A2分别为一级摆杆和二级摆杆设定偏离中心位置的最大幅值角度;ϖ1和 ϖ2分别表示驱动摆杆的转动角速度,在此实验中设定角速度相等即ϖ1=ϖ2,由于角速度 ϖ=2πf,因此两驱动摆杆转动频率亦相等;φ为两驱动摆杆之间运动时的时序差,即运动相位差;δ1、δ2为两驱动摆杆中心线所在平面与样机中性面的初始夹角,由于文中讨论的胸鳍为对称扑动,理论上此角度设置为0。
通过以上描述分析可知,在控制样机运动时需要给定3 个变量分别为转动幅值A=20°、30°、40°,扑动频率f=0.2、0.4、0.6、0.8 Hz 及摆杆运动相位差 φ,其中相位差设定为60°。依次按照以上设计变量进行水动力测试实验。
3 实验结果分析
通过完成一系列水动力实验,直流稳压电源供电电压为7.4 V,将六维力/力矩传感器采集的推力Fx数据及各工况下电流数据进行统计,分别比较不同胸鳍结构对推力及推力等效效率的影响;将推力Fx取平均值,得到胸鳍在20 个周期扑动过程中的平均推力,并将采集的电流值同样进行取平均;由功率P∝电流I,用 |Fx|表 示推力Fx数值均值,其与电流I的比值表示为推力等效效率 ε,即ε=|Fx|/I。
3.1 游动推力分析
对比分析前游推力数据及倒游推力数据,结果见表3。

表3 推力对比分析Table 3 Comparison analysis of thrust
1) 分体胸鳍方式在前游(φ=-60°)工况下,与完整胸鳍方式在测试条件内推力值接近,但随着频率的增加,分体式胸鳍推力增加的斜率大于整体式胸鳍方式,在高频率、大幅值扑动的条件下,分体胸鳍方式可以提供更大的前游推力。
2) 分体胸鳍方式在倒游(φ=60°)工况下,在低频率、小幅值的条件下产生的倒游推力较整体式胸鳍方式差,而随着频率、幅值的增加,倒游推力增加显著。
实验样机翼展与体长比为1.6,参照二维波动板[20]理论进行分析。前游工况下,完整胸鳍鳍板弦向刚度较分体胸鳍鳍板弦向刚度弱,在低拍动频率和低拍动幅值时完整胸鳍鳍板弦向产生被动变形,即流体涡在胸鳍鳍面变形处脱落从而形成前向推力;但随着拍动频率和拍动幅值的增加,分体胸鳍鳍板的被动变形明显优于整体胸鳍鳍板,从而使流体涡脱落更加顺畅,分体胸鳍方式在更大的频率和幅值条件下推力将优于整体胸鳍方式。反之,在倒游的工况下,由于分体胸鳍鳍板尾缘的刚度要大于整体胸鳍鳍板,但在低频率、小幅值的条件下,分体胸鳍鳍板弦向刚度差较小,所以此条件倒游推力差于整体胸鳍鳍板;随着拍动频率和幅值的增加,分体胸鳍鳍板弦向变形明显,有利于流体涡脱落,因此此时倒游推力显著增加。
3.2 等效效率分析
通过表3 的对比结果发现,分析验证2 种胸鳍结构产生的推力效率是十分必要的,因此按照以上方法分析了不同工况下的等效效率对比曲线(见表4),结果如下。

表4 推力等效效率对比Table 4 Comparison of thrust equivalent efficiency
1) 在前游(φ=-60°)工况下,随着幅值和频率的增加,推力等效效率接近,但分体胸鳍在幅值20°时推力等效效率明显优于完整胸鳍,并且在不同拍动幅值的条件下,幅值越大,等效效率拐点发生的频率越小。
2) 在倒游(φ=60°)工况下,随着扑动频率的增加,完整胸鳍的推力等效效率逐渐下降,而分体胸鳍推力等效效率逐渐增加;然而随着扑动幅值的增加,完整胸鳍在相同频率的情况下,推力等效效率也表现出下降趋势,而分体胸鳍的推力等效效率则表现出增加趋势,同时两胸鳍结构倒游的等效效率曲线交点的频率逐步减小。
从以上结论可以看出,前游条件下,随着幅值的增加,分体胸鳍鳍板的等效效率拐点频率逐渐减小,根据二维波动板理论,胸鳍鳍板产生足够的被动变形,有利于流体涡的脱落。倒游条件下,实验曲线表明,随着频率的增加分体胸鳍等效效率曲线斜率向上,且完整胸鳍等效效率曲线斜率向下;根据二维波动板理论,随着幅值的增加,胸鳍鳍板产生被动变形,有利于流体涡在鳍板前缘的脱落,所以分体胸鳍鳍板与完整胸鳍鳍板等效效率曲线交点频率逐渐减小。
3.3 小结
基于二维波动板理论并对2 种胸鳍结构的推力和等效效率数据进行整理,文中设计的分体胸鳍方式随着拍动频率和幅值的增加,前游推力与完整胸鳍方式接近,但斜率较后者更大;前游推力等效效率会随着拍动幅值的增加而发生拐点,并且拐点频率逐步变小;倒游推力同样随着幅值的增加拐点频率逐渐减小,且分体胸鳍方式倒游推力显著优于完整胸鳍方式;倒游推力等效效率亦体现此规律。
综上所述,分体胸鳍结构在前游推力和推力等效效率接近的情况下,产生倒游的推力及等效推进效率的曲线斜率随着拍动频率和拍动幅值增加均保持递增趋势,较完整胸鳍结构明显提升。
4 结论
文中针对2 种胸鳍结构进行对比实验,为解决摆旋机构胸鳍倒游推力的需求进行结构优化及验证,通过前游和倒游推力以及前游和倒游推力等效效率2 个方面的综合对比,分析表明: 1) 分体胸鳍结构的前游推力稍低于完整胸鳍,但随着频率和幅值的增加将优于完整胸鳍结构;分体胸鳍结构的倒游推力同样随着频率和幅值的增加而优于完整胸鳍;2) 分体胸鳍结构的推力等效效率随着频率和幅值的增加而增加,在高频大幅值的情况下优于完整胸鳍。文中2 种胸鳍结构随着拍动幅值的增加,拐点频率逐渐减小,因此,鳍板结构刚度分布对推力的影响较大。实验亦表明优化胸鳍结构在近乎不影响前游推力的情况下可以提升倒游推力。未来将进一步从优化胸鳍刚度的分布和流场分析的角度提升胸鳍的推进性能,从而使基于摆旋推进机构仿生鱼的游动稳定性及机动性得到综合提升。
猜你喜欢
海洋工程(2020年1期)2020-04-10
家庭影院技术(2019年8期)2019-08-27
自动化学报(2019年6期)2019-07-23
电子制作(2018年1期)2018-04-04
养生保健指南(2017年8期)2017-12-09
小火炬·智漫悦读(2017年7期)2017-09-29
船舶力学(2017年5期)2017-06-05
科学Fans(2017年3期)2017-04-13
制造业自动化(2017年2期)2017-03-20
汉语世界(2016年2期)2016-09-22