柔性关节空间机械臂传感容错无模型自适应控制
2024-03-17 04:29浦玉学李孝宝
宇航学报 2024年1期
浦玉学,陈 演,李孝宝
(1.合肥工业大学土木与水利工程学院,合肥 230009;2.复旦大学航空航天系,上海 200433;3.土木工程结构与材料安徽省重点实验室,合肥 230009)
0 引言
近年来,随着机器人技术的发展,结构轻、载重比高和耗能低逐渐成为空间机械臂发展的重要趋势,也不可避免地带来机械臂驱动关节柔性化和非线性问题[1]。关节是空间机械臂空间任务操作的直接执行部件,是保证机械臂在轨操控性能的关键组成设备。然而柔性关节传动过程中存在的传动结构阻尼、非线性刚度以及动态摩擦综合作用引起的关节强非线性会导致空间机械臂关节跟踪精度降低,给空间机械臂精细化操作带来严重挑战[2-3]。另外,太空环境恶劣复杂,作为典型的舱外多自由度机电一体化系统,会出现受到温差交替、强磁干扰等因素影响引起驱动关节传感系统信噪比降低、性能衰退甚至失效的情况,因此面向空间机械臂的传感故障检测和容错控制技术引起了国内外广泛关注[4]。
目前,柔性关节精确建模是机械臂控制系统设计的主要挑战。Spong[5]提出将柔性关节简化为线性弹簧模型,但没有考虑关节中的迟滞、摩擦等非线性因素,无法全面反映关节真实动力学特性。后续有很多学者围绕关节迟滞、摩擦等非线性因素进行建模研究,例如描述迟滞刚度模型的KP 模型[6]、Preisach模型[7]、PI模型[8]等,描述摩擦的LuGre模型[9]和GMS 模型[10]等。但是描述柔性关节的复杂非线性因素和动态特性会导致关节模型过于复杂且难以反映关节真实动力学特性,这给传统的基于模型的控制模式带来严重挑战。因此,研究基于无模型的控制方法成为增强空间机械臂控制系统性能的一项具有重要意义的工作。无模型指的是控制器设计过程中,仅需要系统的输入和输出数据,不需要被控对象物理模型参数。无模型姿态解耦控制[11]、PID控制[12]、迭代学习控制[13]均是比较成熟且应用广泛的无模型控制方法。近年来,侯忠生教授[14]提出的无模型自适应控制(Model-free adaptive control,MFAC),因能够实现未知非线性的受控系统结构与参数自适应控制而备受关注。浦玉学等[15]将模糊策略与无模型自适应控制相结合,实现了柔性空间机械臂碰撞过程的振动抑制。然而,MFAC 作为基于数据驱动的控制算法,对数据的真实性和有效性非常依赖。对于空间机械臂而言,真实有效的运动信息的获取只能依托各类传感器。
太空环境恶劣复杂,容易引起传感器等电子元件状态故障,包括太空环境、机械臂运动、末端负载等动态变化引起的传感信号畸变,太阳辐射、电磁风暴等环境因素造成的传感元件老化、破损。传感器故障会导致传感数据异常,无法反映空间机械臂的真实运动状态。传感器容错控制引起了很多学者的关注。黄鹏飞等[16]针对高超声速飞行器强非线性和强噪声问题,开展了迎角传感器故障诊断方法研究;Wang 等[17]基于RBF 神经网络算法研究了一类具有传感器故障的离散系统容错跟踪控制问题;雷荣华等[18]针对关节存在部分失效故障的柔性空间机械臂系统,提出一种自适应H∞容错抑振混合控制算法;马艳如等[19]设计了一种基于自适应神经网络的非线性容错控制律,解决控制系统存在的干扰、故障及不确定性问题。
综上所述,传感系统故障检测和容错控制是保证空间机械臂控制系统安全稳定运行的必要环节。但目前适用于无模型控制的传感系统故障识别和容错控制研究尚不多见。因此,本文提出空间机械臂关节运动传感器故障检测和无模型自适应容错控制方法。基于动态线性化和递推参数估计方法实现对传感信息存在畸变及数据丢失情况进行判定及对关节实际运动状态进行预测估计;建立包含跟踪误差变化率项的无模型自适应控制新型准则函数,有效惩罚由传感故障引起的参数估计突变问题;最后设计新型传感容错无模型自适应控制(Sensor fault-tolerant model-free adaptive control,SFTMFAC)算法。通过上述方案,实现快速诊断故障状态,并做出有效控制决策,短期内可有效避免传感故障导致的控制系统瞬时发散,增加系统响应时间,保证系统的稳定性。
1 双连杆柔性关节空间机械臂
双连杆柔性关节机械臂是由柔性关节和刚性连杆组成的机电系统,其模型结构如图1所示。

图1 双连杆柔性关节机械臂Fig.1 Double flexible joint manipulator
其中i=1,2,Jmi为第i个电机转子中心转动惯量,mmi为第i个电机转子质量,Jli为第i个机械臂中心转动惯量,mli为第i个机械臂质量,li为第i个机械臂长度,θli为i关节负载侧转动角度,Tfi为i关节内部摩擦,Ni为i关节减速比,τi为i关节扭转力矩,τmi为i关节电机端力矩,θmi为i关节电机转动角度,mp为末端负载质量。本节建立双柔性关节机械臂动力学模型,为后文控制方法的验证和控制仿真试验的开展提供模型对象。
1.1 空间机械臂建模
利用拉格朗日方程,推导双柔性关节机械臂动力学方程。柔性关节机械臂的动能包括刚性臂动能、关节处动能及末端负载动能。势能为柔性关节产生的弹性势能,太空环境忽略重力势能。可得双柔性关节机械臂模型为:
式中:M(θl)为机械臂转动惯量矩阵为离心力、科氏力矩阵,Jm为电机转动惯量矩阵,θm=[θm1,θm2]T和θl=[θl1,θl2]T分别为电机侧和负载侧转角向量,τm=[τm1,τm2]T为两关节电机输出力矩,N=diag(N1,N2)为关节减速器传动比向量为关节内部摩擦力列向量,τ=[τ1,τ2]T为关节扭转力矩向量,τi=f(Δθi)一般为关节扭转角的非线性函数,表现为关节非线性迟滞刚度。Δθi为由关节柔性引起的关节扭转角。
1.2 关节非线性建模
为表示关节非线性,选择LuGre 摩擦模型模拟关节摩擦,选择PI 迟滞模型与非线性刚度叠加模拟关节迟滞。
1.2.1 关节摩擦建模
LuGre摩擦模型表达式为:
式中:z表示鬓毛平均挠度表示Stribeck 效应函数,Tc表示库仑摩擦力矩,Ts表示静摩擦力矩表示临界Stribeck 速度,δ表示Stribeck 形状系数,σ0表示鬃毛刚度,σ1表示鬃毛阻尼系数,σ表示粘滞摩擦系数。
1.2.2 关节迟滞刚度建模
第i个关节的PI 迟滞模型由有限个play 算子各自加权进行线性叠加构成,play算子数学表达式为
式中:r为play 算子的阈值,Δθi(t)为算子的输入,τhpi为算子的输出。将n个play算子加权叠加得到PI迟滞模型,数学表达式如下:
式中:n为play 算子个数,τhi为PI 模型输出,wj为第j个算子的权值。
采用三次多项式表示非线性刚度曲线:
式中:α1和α2为非线性刚度系数。
由此得到第i个关节迟滞刚度模型为:
由式(1)~(7)可知关节非线性因素复杂、建模困难,考虑到这一问题,本文基于无模型自适应控制理论,设计如下控制方案,实现对空间机械臂的运动控制。
2 传感容错无模型自适应控制
2.1 空间机械臂动力学模型转化
为便于进行控制器设计,基于紧格式线性化的思想将空间机械臂动力学方程进行形式上转化:
将空间机械臂系统离散化,设采样时间为T,时间离散点序号k。
定义系统输入向量u(k)=[0,0,τm1,τm2]T,系统输出向量,则空间机械臂动力学方程式(8)可改写为:
k时刻空间机械臂系统(9)可以表示为:
对系统(11)提出两个假设,即:
假设1.f(·)关于系统输入u(k)的偏导数是连续的。
假设2.系统(11)满足广义Lipschitz 条件,即对任意k1≠k2,k1,k2≥0,u(k1) ≠u(k2),满足:
其中b>0是常数。
对于满足假设1、2 的非线性系统(11),当‖ Δu(k) ‖≠0 时,引入伪雅可比矩阵(Pseudo Jacobian matrix,PJM)Φ(k) ∈R4×4。注意,该矩阵仅在无模型自适应控制中使用,与机械臂的雅可比矩阵并非同一概念,使系统(11)转化为如下动态线性数据模型:
式中:Δu(k)=u(k) -u(k-1),且对于任意时刻k,Φ(k)有界,具体展开为:
为了后文稳定性分析的严谨性,做出如下假设:
假设3.Φ(k)是对角占优矩阵,即
且Φ(k)中各个元素符号对于任意时刻保持不变。
2.2 传感故障识别及容错设计
2.2.1 传感故障监测器设计
式中:ρ为估计误差权重因子(k)为估计误差如下
将k时刻传感器得到的传感值与估计器得到的估计值对比即可判定传感信息是否异常。
给定如下判别式函数ξ(k):
式中:α,β为经验阈值因子,经验阈值为传感值与预测值比值的容许范围。考虑到预测值与传感值存在一定误差,所以容许范围不宜过小,这会导致误差信号被识别为异常信号,也不宜过大,这会遗漏异常信号。通过选取合适的经验阈值,故障监测器能实现对不同程度传感故障的监测,当扰动特别小时,由于后文设计的控制算法存在自适应性,也能保证算法的稳定性。通过ξ(k)是否为零即可判断对应i关节传感数据是否异常。
2.2.2 传感信号估计器设计
1)当ξ(k)=1 时,传感无异常,直接使用关节传感器实际测量运动状态信息输入至机械臂控制系统。考虑到控制过程采用的是瞬态信息,现对式(16)进行一定改进,对误差进行迭代处理,增强算法鲁棒性:
式中:ε为迭代系数。
2)当ξ(k)=0 时,传感出现异常,则使用基于式(15)的负载侧关节运动状态估计信息,将其输入至机械臂控制系统中,此时估计误差暂停迭代更新。
考虑上述两种情况,得到参与控制系统的响应信号:
2.3 改进的无模型自适应控制
2.3.1 控制输入准则函数
传统的无模型自适应控制基于准则函数Fc对系统输入进行控制。
式中:yd(k)为关节负载侧期望转动角度及角速度。
为了在保证算法响应速度的同时减小超调量,本文定义跟踪误差变化率,并将其引入控制输入准则函数中:
新的输入准则函数可以有效惩罚由传感故障引起的参数估计变化过大,增加算法的稳定性。
2.3.2 关节控制力矩迭代更新将式(13)代入式(21),并对u(k)求偏微分,运用最优性准则令其为0,可以得到关节控制力矩:
2.3.3 伪雅克比矩阵迭代更新
在控制过程中,由于输入输出实时变化,PJM 的真实值是动态不可测的,考虑PJM 的极小化及系统动态线性模型式(13),设计判别函数Qc对PJM 进行估计:
对式(23)极小化处理后得到:
考虑到假设3,PJM重置算法如下:
式中:i,j=1,…,4,i≠j。
式(22)、(24)中引入μ,λ是为防止分母为零,导致算法出错,同时λ还可以使得系统更具有平滑性,防止空间机械臂系统输出发散或不能达到期望值。ρ1,ρ2,ρ3及η是步长因子,使算法更具有普遍意义。(0)是PJM估计值的初始值。
综上,SFT-MFAC控制框图如图2所示。
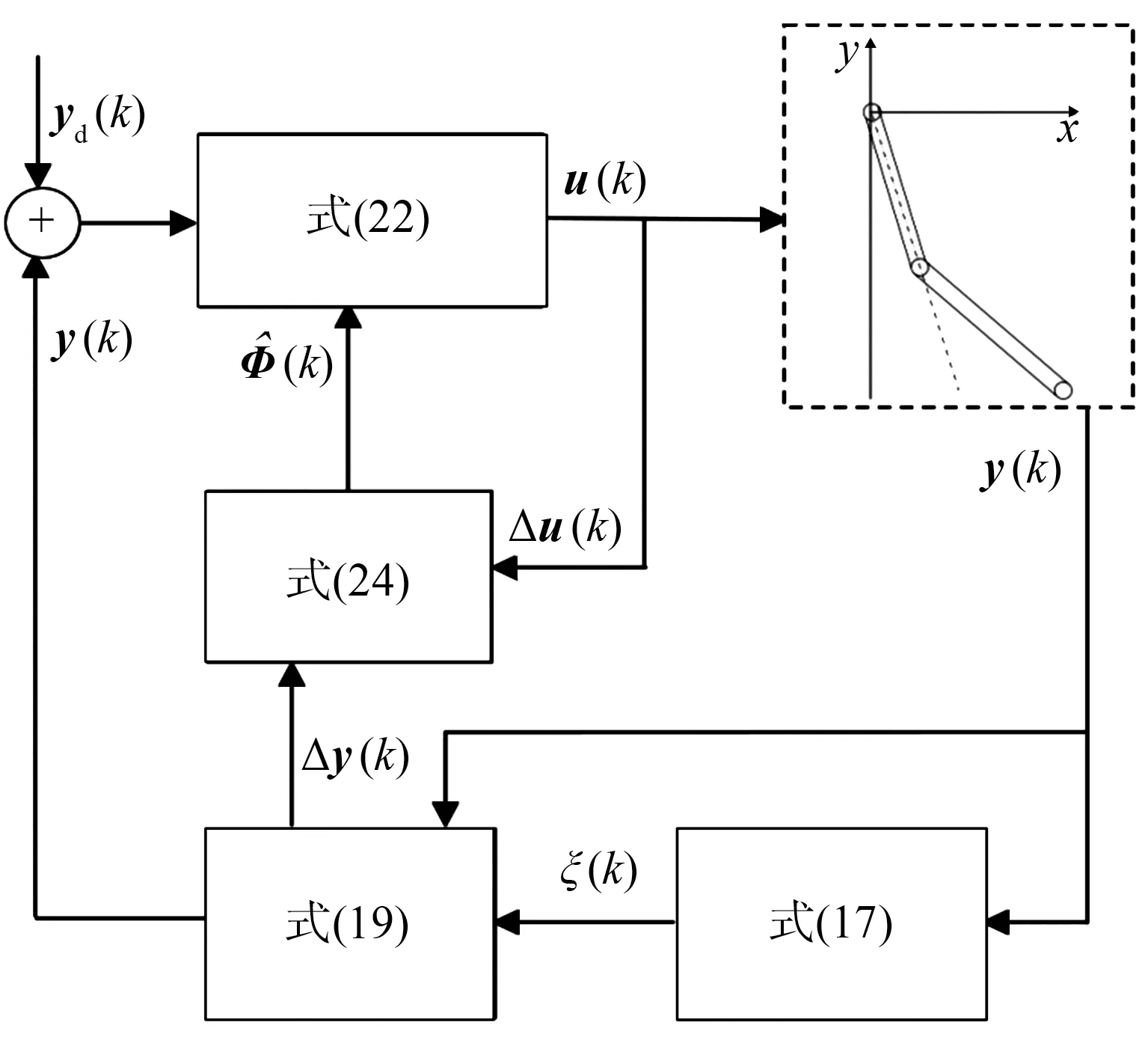
图2 SFT-MFAC控制框图Fig.2 SFT-MFAC control block diagram
2.3.4 SFT-MFAC算法稳定性和收敛性证明
对于多输入多输出离散时间非线性系统,在满足假设1,假设2 和假设3 的条件下,SFT-MFAC 控制方案具有如下性质:当yd(k+1)=y为常数时,存在一个大于0的正数λmin,当λ>λmin时:1)系统跟踪误差是收敛的;2)系统输出序列{y(k)}和输入序列{u(k)}是有界的。证明过程简述如下:
①本文的SFT-MFAC 算法并未对经典MFAC 算法的进行更改,这可以保证的 有界性[20]。
②证明系统输出误差序列是有界且收敛的。定义系统输出误差为:
利用Gerschgorin 圆盘原理及三角不等式可知,存在小正数d1,d2和d3,满足:
式中:‖ · ‖v为对应项的相容范数。
即证明系统输出误差序列是有界且收敛的。因为yd是给定常量,且e(k)有界,得出系统输出序列{y(k)}的有界性。
③证明输入序列{u(k)}的有界性。
对式(22)进行等价变换
结合SFT-MFAC控制律(22)及式(30)得:
由式(31)得到系统输入序列{u(k)}是有界的。
上述证明是在传感器并未发生故障的情况下进行的,当传感器发生故障时,考虑到对异常信号的估计值是由动态线性数据模型式(13)变化的式(15)得到的,当式(15)满足假设2时,即可证明传感器出现故障后,采取的传感信息估计值也是稳定有界的。
将式(15)代入假设2的式(12)中,得到式(32):
令k1>k2,由式(15),y(k1)可以分解为式(33):
考虑到ρ(k1-k2)e0为一有限常值,选取合适的常数b,能够使式(35)成立,即当传感器发生故障时,采取的传感信息估计值也是稳定有界的。综上所述,本文设计的SFT-MFAC算法是稳定且收敛的。
3 柔性关节机械臂控制仿真实验
为验证所提出的传感故障监测器、传感信号估计器以及SFT-MFAC 算法的有效性,采用图1 所示双连杆柔性关节空间机械臂进行运动控制仿真实验。考虑到空间机械臂关节主要以伺服驱动电机作为执行机构,其中旋转变压器是常见的位置传感方式,由于太空中太阳辐射以及电磁风暴等环境因素影响,旋转变压器容易发生故障,旋转变压器的故障类型主要包括连接器断路故障导致的传感信号畸变[4]以及旋转变压器卡死引起的传感信号丢失[21]等(如图3所示)。

图3 旋转变压器故障导致的信号异常Fig.3 Signal abnormality caused by rotating transformer fault
本节设置传感数据畸变和传感数据丢失两种传感故障情况进行数值仿真实验。受控空间机械臂采用第1 节所述方法进行动力学建模,其中空间机械臂系统参数如表1 所示,空间机械臂系统控制算法参数如表2所示。

表1 空间机械臂参数Table 1 Space manipulator parameters

表2 控制参数Table 2 Control parameters
机械臂关节参考转动角度为:
3.1 单关节传感故障情况
设置3~3.2 s、3.4~3.6 s、3.8~4 s关节1传感器数据畸变,严重偏离正常容错阈值,其中随机波动由Simulink 中的随机函数表示,如图4 所示。通过本文设计的传感故障监测器,3~4 s 时关节1 传感信号3次异常状态均被准确识别。
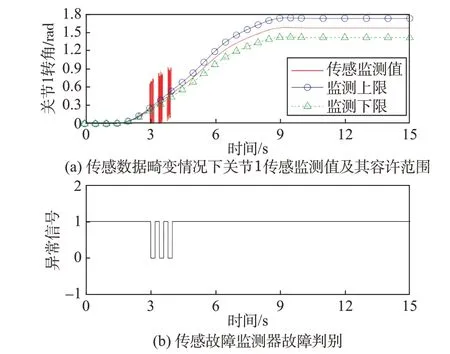
图4 关节1关节角信号及故障判别Fig.4 Joint angle signal and fault diagnosis of joint 1
对传感故障信号进行估计预测,结果如图5 所示。3~4 s 关节1 转角的传感器监测值与实际值误差为116.85%,经过处理后误差为1.80%。可见在传感故障情况下,传感预测值可以有效估计监测值。采用本文所提出的SFT-MFAC 算法运动控制效果如图6所示,在SFT-MFAC控制下的误差为3.10%。
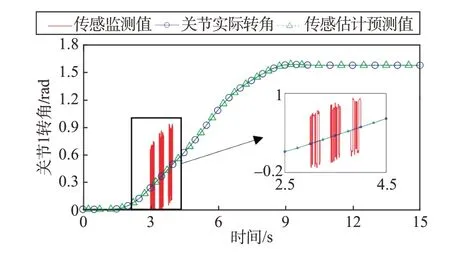
图5 关节1关节角度估计预测值Fig.5 Joint angle estimate predicted value of joint 1
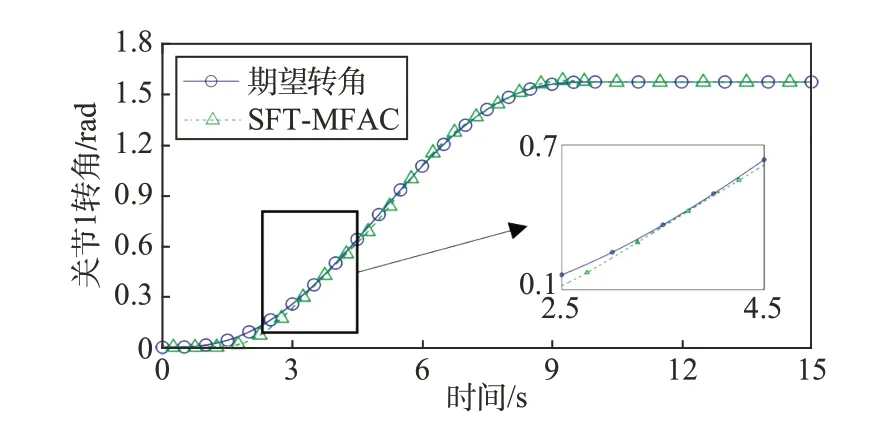
图6 关节1控制效果Fig.6 Control effect of joint 1
3.2 双关节传感故障情况
考虑2个关节同时出现传感故障情况。设置3~3.2 s、3.4~3.6 s、3.8~4 s关节1传感数据畸变,同时关节2 传感数据丢失。关节1 故障判别、关节角度估计及控制情况与3.1节类似,此处不再赘述。
图7 为关节2 传感故障监测器监测的异常信号。3~4 s 时关节2 传感信号3 次异常状态均被准确识别。
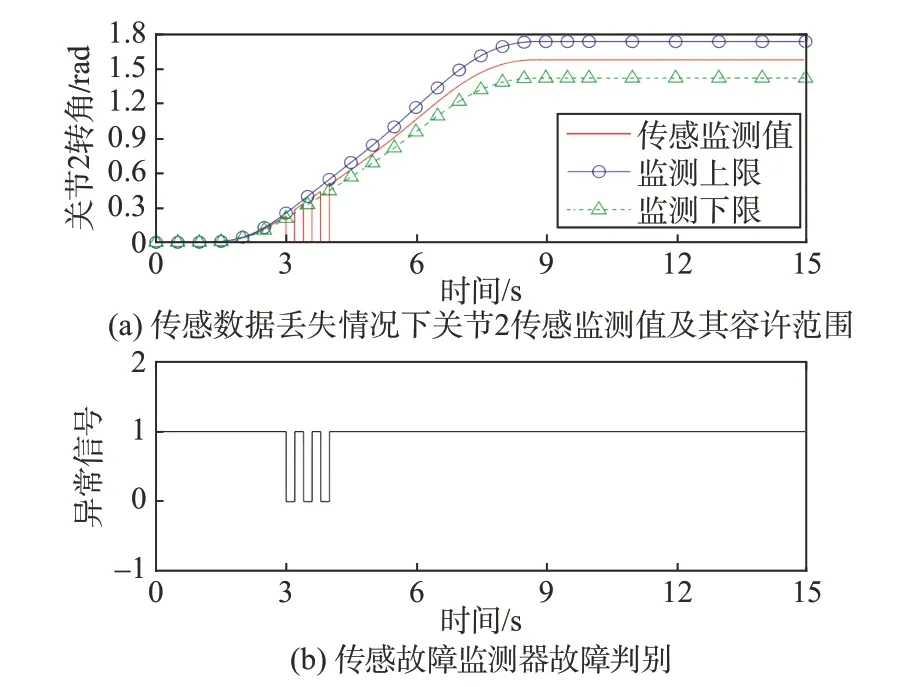
图7 关节2关节角信号及故障判别Fig.7 Joint angle signal and fault diagnosis of joint 2
对传感故障信号进行估计预测,结果如图8 所示,3~4 s 关节2 转角的传感器监测值与实际值误差为100%,经过处理后误差仅为3.13%。采用本文所提出的SFT-MFAC 算法运动控制效果如图9 所示,在SFT-MFAC控制下的误差为3.35%。

图8 关节2关节角度估计预测值Fig.8 Joint angle estimate predicted value of joint 2
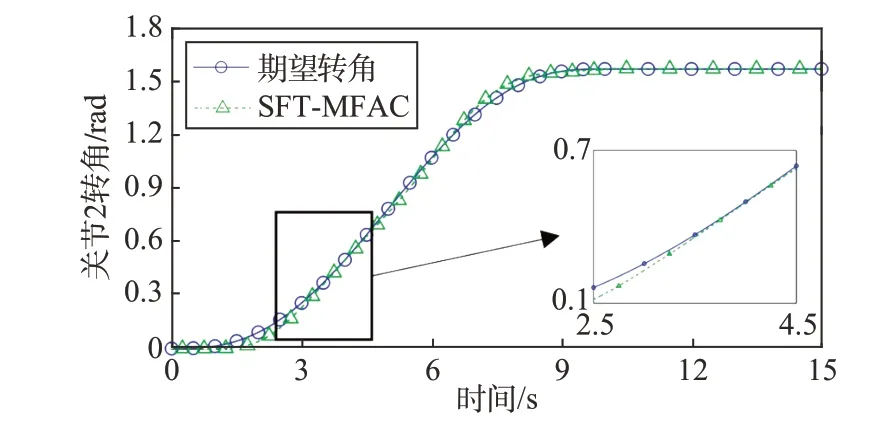
图9 关节2控制效果Fig.9 Control effect of joint 2
综上,即使空间机械臂关节传感器都发生故障,本文所提出的SFT-MFAC 算法仍能有效识别故障信号,并对故障信号做出预测估计,在传感器发生故障的情况下,保持空间机械臂运动的稳定性。
4 结论
本文以双柔性关节空间机械臂为研究对象,针对复杂太空环境易导致空间机械臂传感器系统不稳定甚至故障的问题,提出基于空间机械臂运动传感器故障观测的无模型自适应容错控制方法。可以发现:1)所设计的传感故障监测器和传感信号估计器,可有效实现对传感数据畸变及丢失等故障的判定,并进行实际运动状态预测估计;2)建立的包含跟踪误差变化率项的无模型自适应控制准则函数,可有效解决由传感故障引起的参数估计突变问题;3)所提出的SFT-MFAC 控制算法能有效控制关节传感信息异常情况下的空间机械臂运动,有效提高控制算法的鲁棒性。
本文方法可以有效进行传感故障识别判断,以保障后续操作任务的可靠执行。可应用于:1)在关节传感故障突发时,空间机械臂能够实现快速传感故障识别、平稳安全停机;2)可避免由传感信号突变引起的控制系统发散,为备用控制算法切换提供充足的缓冲时间,进一步提高控制系统的鲁棒性。值得注意的是,当传感器长期处于故障状态,需要考虑使用其他传感器或机械臂模型进行校正或融合处理。
猜你喜欢
传感技术学报(2022年7期)2022-10-19
机械工业标准化与质量(2022年9期)2022-09-30
今日农业(2022年15期)2022-09-20
石油沥青(2021年5期)2021-12-02
文化创新比较研究(2020年7期)2021-01-13
当代工人(2020年8期)2020-05-25
电子制作(2018年23期)2018-12-26
小溪流(画刊)(2017年12期)2018-01-10
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
中国舰船研究(2014年6期)2014-05-14