基于CH32 的双车协同智能控制系统设计
2024-03-19 05:16王子豪李铮李文良吴岩
电子制作 2024年5期
王子豪,李铮,李文良,吴岩
(杭州电子科技大学 电子信息学院,浙江杭州,310018)
0 引言
智能汽车自动驾驶技术是汽车行业发展的跨时代标志,推动汽车行业走向智能化方向发展的道路[1]。随着科技的发展,人们对智能汽车的需求也趋于多元化,智能车逐渐成为代替人们在危险环境进行探索和开发有限资源的重要工具。但单智能车存在不能高效执行并行度高且复杂的任务的缺点,所以近年来许多学者展开对多车协同系统的研究[2]。为了深入研究多车协同合作时遇到的难题,本文基于CH32V307VCT6(CH32)单片机自主设计并实现了双车协同智能控制系统,通过传感器检测距离和蓝牙通信,保持队列次序,并设计数字摄像头图像处理算法和电磁感应处理算法,采用无线充电方案,真正实现高稳定性和高速度的双车协同系统。
1 系统总体方案设计
本系统总体方案设计如图1 所示,主要分为三大模块:道路信息采集与处理模块;车辆控制与运行模块以及双车协同与信息交互模块。系统通过多传感器采集道路信息,核心控制器CH32 融合各传感器数据,根据算法实现跟踪控制。双车协同模块能够实时获取双车距离,蓝牙通信交互配合,同时实现双车无线充电功能。实际车模如图2 所示。

图1 系统总体方案

图2 实际车模
2 硬件系统电路方案
2.1 电路总体设计
硬件系统设计采用以CH32 为核心运算的设计方案,整套硬件系统可共分为3 大模块:电源模块、传感器模块、驱动模块。图3 是主控芯片原理图。
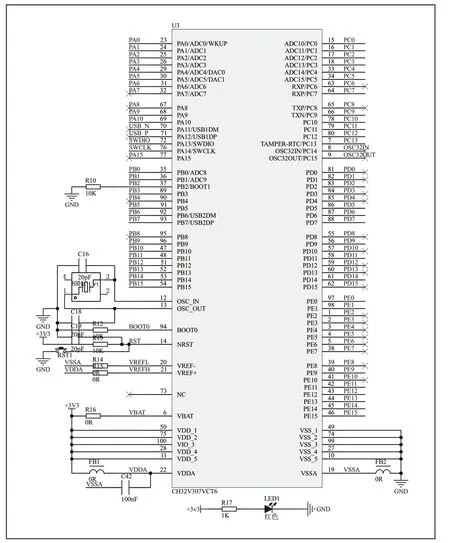
图3 主控芯片原理图
2.2 系统电源设计
根据系统设计,5V 电源选择TPS7A8001,提供超低压差,高输出电流和低地电流;3.3V 电源使用TPS7333,具备超低静态电流和睡眠状态电流;舵机采用TPS5450 作为开关电源,转换效率高,能量损耗小。TPS545 不仅为舵机提供稳压电源,同时也作为唯一的前级电源,作为5V电源和3.3V 电源的输入。
2.3 驱动电路设计
2.3.1 电磁运放电路
电磁线的信号由LC并联谐振得到,为模拟信号,因为感应电动势为差分信号且较小,需要特殊电路进行调理。本系统最终采用双电源仪表放大器[3]方案,通过直接放大差分信号实现效果。同时系统选择运放检波方案将信号转化成对应的直流电平。
2.3.2 无线充电发射端与接收端电路
无线充电方案发射端如图4 所示,接收端如图5 所示。

图4 充电发射端电路
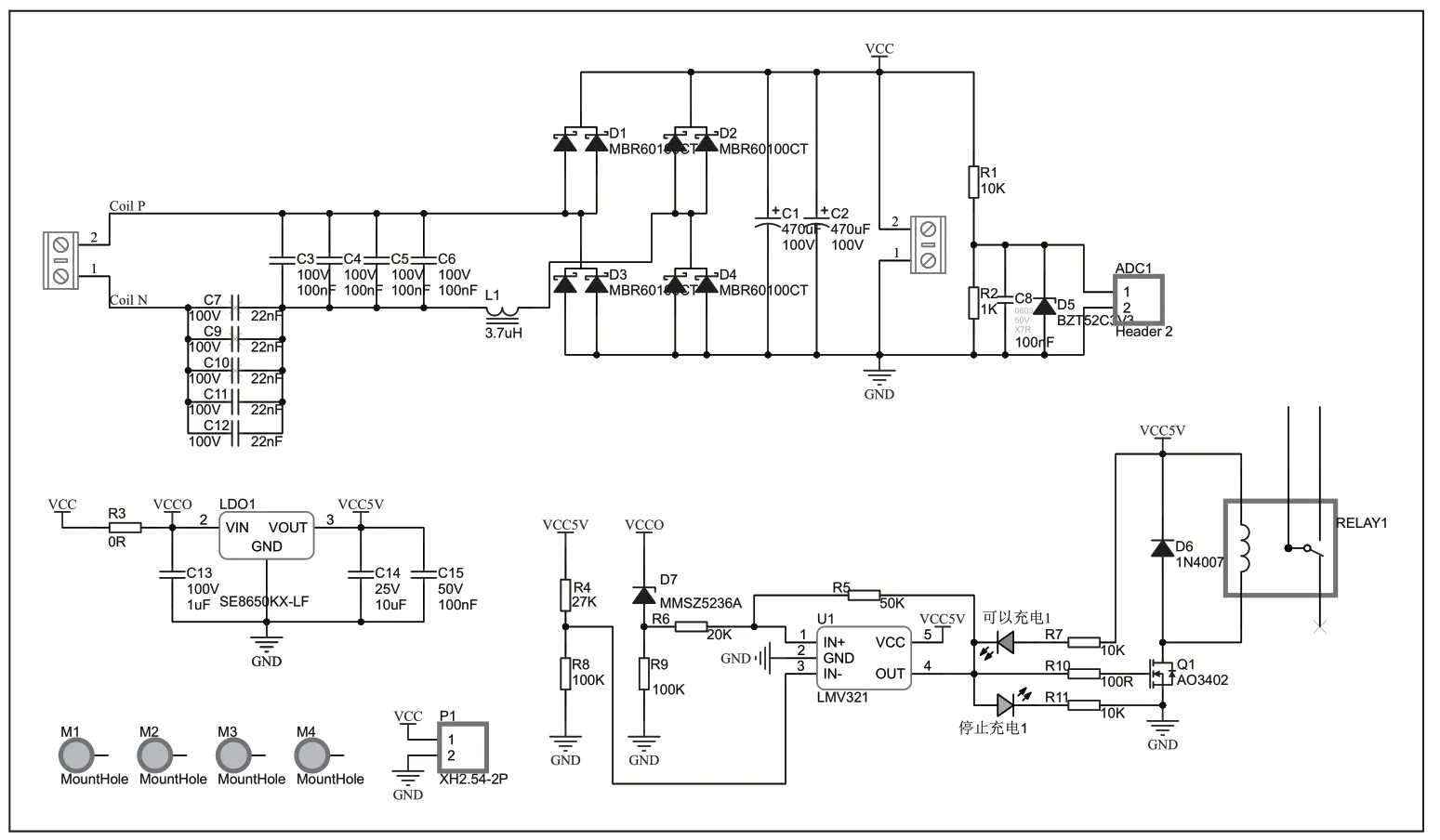
图5 充电接收端电路
2.3.3 驱动板电路
电机驱动电路,是控制电路的关键,因此本系统选用H桥[4]的全桥电路,使智能车具有优秀的控制效果,具有良好的动态性和准确性。具体驱动电路如图6 所示。

图6 驱动板电路
3 软件系统设计方案
系统软件设计方案分为五大模块:无线充电、道路信息采集与处理、舵机转向控制、电机速度控制和双车协同交互。系统程序流程如图7 所示,系统初始化各模块进行无线充电,充电完成后进行正常的道路信息采集与处理,通过控制系统,实现智能车队稳定、有序而安全地行驶;识别到车库元素后,前车停在车库附近,后车停入车库,系统结束。

图7 系统程序流程图
3.1 道路信息采集与收集
本系统选择MT9V034数字摄像头作为图像传感器,直接采集灰度图像。本系统先通过简单去噪处理降低图像噪声的干扰再采用大津法过滤非必要图像信息。大津法基本的思想是在图像灰度差异的基础上,自动选取合适的阈值,将图像分为背景和目标两个部分[5]。但仅仅使用基础大津法得到的道路二值化图像受光线影响较大,本系统采用阳光算法,对不同区域采取独立大津法计算,使整体图像减少腐蚀和膨胀,效果如图8 所示。

图8 道路二值化图像
赛道边沿的提取是所有识别的基础,我们对赛道边沿提取时先从近几行入手,根据近处的边线给定远处边线的寻找范围,通过阈值判断找出下一行的准确边界,从而提取赛道的中线。最终边缘提取得到的道路轮廓如图9 所示。

图9 道路轮廓图像
3.2 舵机转向控制
舵机控制是控制算法中最重要的方面之一,本系统舵机的控制采取传统的PID 控制。基于偏差的比例、积分和微分的控制器简称为PID 控制器。是工业中最常见的一种控制器。由于该控制器算法简单、鲁棒性强,因而被广泛应用于各种工业过程控制系统[6]。
数字PID 控制器在实际应用中一般可分为两种:增量式PID 控制器和位置式PID 控制器。本系统对舵机的控制采用位置式PID,具体算法实现公式如式(1)。
PID 公式展示:
式中:Kp为比例时间系数;Ki为积分时间系数;Kd为微分时间系数。
3.3 电机速度控制
3.3.1 差速系统
大量的研究和实验表明,较为简单的PID 控制差速在汽车高速状态下逐渐展现疲态,而本系统采用的阿克曼转向系统是目前四轮汽车较为普遍的差速转向系统,拥有更强的稳定性和更高的速度上限。阿克曼原理是在忽略汽车质心侧偏、汽车行驶过程中的侧向力、横摆角或者极端的路况下,使每个车轮的运动轨迹都可以完全符合它的自然运动轨迹,从而保证轮胎与地面间处于纯滚动而无滑移[7]。
3.3.2 电机控制
本系统采用闭环电机控制,通过配合编码器,实现速度精确控制。具体算法中,电机速度控制采用了前馈增量式PID 控制方法。
增量式PID 算法在实时性、稳定性、抗干扰能力和参数调节方面具有一定的优势,适用于一些对实时性要求较高的控制系统。
3.4 双车协同交互
3.4.1 交互系统
本系统选用双CH9141 蓝牙模块进行通讯,通过蓝牙传输协议发送信号实现前后车的简单交互。在通过大量试验后,发现该蓝牙模块受外部蓝牙信号干扰较大。为解决该问题,本系统通过设定独有的蓝牙通信包:特殊的帧头和帧尾,使其传输成功率和准确性大大提高。本系统通过特定的蓝牙传输协议,使得双车在高速情况下面对不同的道路元素也能保持有序和稳定。同时为应对各种突发事件和提高协作效率,本系统提供一种全新的协作模式,基于高成功率识别道路信息的情况,双车可以通过指令实现不同元素的不同协作方式,例如断路元素脱离跟随状态、环岛元素减小跟随距离等一系列操作。实验证明这种全新协作模式大幅提升了双车协作的安全性和效率。
3.4.2 定位系统
本系统通过超声波测距和图像识别达到定位后车的位置,主要通过超声波测距模块实时获取前后两车的直线距离,通过图像识别检测两车当前的路况信息,再将两者结合得到较为准确的实际距离。前车实时根据后车的位置和当前双车协作模式调整自身速度,使双车队列有序。本系统在特殊道路时采用UWB 精准定位[8]。即提高整体安全性能,同时保证系统流畅性和省电功能。
4 系统调试与实际运行
双车系统的研究,是一个不断测试的过程,分析处理以适应不同道路状况。实测图如图10 所示。测试不同长度的道路的行驶情况,记录实际情况,测试发现系统存在的缺陷在于随着路程的增长,发生相撞的概率增加[9],通过修正PID 参数和完善图像处理算法,最终完赛率接近90%,双车速度能达到2.7m/s,并获得第十八届全国大学生智能汽车竞赛电能接力组第一名。

图10 双车实际运行图
5 结论
本文设计并实现了基于单片机的双车协作智能控制系统,通过蓝牙通信使得双车在高速行驶的情况下面对不同的道路元素也能保持有序和稳定,并且利用阿卡曼转向PID控制,保持较强的鲁棒性。此外,基于边缘检测、大津法和贝塞尔曲线[10]等图像识别算法和电磁滤波方案,结合动态参数调整,配合全新的定位协作模式,使得双车协同智能控制系统具备强稳定性、高安全性和高速度性的特点。
猜你喜欢
故事会(2022年21期)2022-11-06
工业设计(2022年7期)2022-08-12
排灌机械工程学报(2021年1期)2021-01-19
自动化学报(2019年6期)2019-07-23
家庭影院技术(2018年10期)2018-11-02
家庭影院技术(2018年3期)2018-05-09
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
玩具世界(2017年8期)2017-02-06
舰船科学技术(2015年8期)2015-02-27