道路隐形指示标志的需求与创新
2024-03-25 15:26张晓春陆昕彤胡键涵
科技创新与应用 2024年8期
张晓春 陆昕彤 胡键涵
摘 要:为进一步推进车辆自动驾驶与道路基础设施的智能化联系,高性能可靠的智能频段识别道路标志已成为交通基础设施研究者和建设者关注的重点。针对现行道路标志对自动驾驶影响的气象环境和交通环境的敏感性缺陷及标线材料污损性,该文定义并设计一种隐含于路面结构中的新型道路隐形指示标志,提出路面结构中道路隐形指示标志的布设方式,能够整体提高交通标志的使用寿命,对智慧交通领域的研究具有重要意义。
关键词:隐形指示标志;自动驾驶;智慧交通;创新应用;电压
中图分类号:U417.9 文献标志码:A 文章编号:2095-2945(2024)08-0005-07
Abstract: In order to further promote the intelligent relationship between vehicle autopilot and road infrastructure, high-performance and reliable intelligent band recognition of road signs has become the focus of traffic infrastructure researchers and builders. In view of the sensitivity defects of the current road signs on the meteorological environment and traffic environment and the contamination of marking materials, this paper defines and designs a new type of road invisible indicator sign hidden in the pavement structure. It is proposed that the layout of invisible road signs in the pavement structure can improve the service life of traffic signs as a whole, which is of great significance to the research in the field of intelligent transportation.
Keywords: invisible sign; autopilot; intelligent transportation; innovative application; voltage
自动驾驶技术是未来道路交通的重要关键技术,车辆所在车道的识别是自动驾驶技术的一大基石。对于道路隐形指示标志的合理使用,可有效弥补现有道路显形标志标线存在的问题,提高交通标志的使用寿命,完善了智慧交通领域的基本组成。
1 交通标志的发展历程
交通标志起源于德国,距今已有80多年的历史。在早期西方工业社会,道路边线的设计和涂划相对简单,交通管理部门仅在道路上施划中心线及人行横道线。自西方工業社会经济危机结束至第二次世界大战全面爆发前,道路交通快速发展,这一时期的道路已有同向多车道,交通管理部门通过涂划道路交通标志起到分隔车道的作用,从而保障同方向行驶车辆安全。随后,标志由最初的单实线逐渐补充了虚线和双实线,标志的颜色也从单纯白色到现在的白、黄、红和蓝等颜色。
2 现有交通标志的缺陷
近年来,随着交通事业的蓬勃发展和对出行体验、道路运输效率的重视,人们对道路标志的要求逐渐提高,而伴随着自动驾驶及相关智能化产业的飞速发展,能否准确、快速地识别道路标志,并基于识别结果引导驾驶行为,日趋成为交通安全的重要前提。现有交通标志是基于可见光频谱内的人眼(摄像系统)识别的标志,即显形交通标志。当前道路车道识别技术依赖于路面标志线的识别,包括车道标志线、交通标志线等。目前,现行道路交通标志线,其性能是得到了充分验证的,也成为了道路交通的一大基本要素。但现有道路标志线难以克服以下几个问题。
2.1 气象环境影响
标志标线受雾气、雨水、冰雪、雾霾和沙尘等气象影响服役性能大幅下降。交通标志正常服役的基础是可识别性,在可见光视觉感知条件下,无论是驾驶员可识别还是人工智能可识别,都需要标志标线的完整、清晰和连续可视。而受恶劣气象环境影响,驾驶员和图像识别系统无法视觉观测到道路前方连续清晰的道路表面显形交通标志标线及视觉区域范围内的交通标志标线,这对于交通安全是一巨大隐患[1-3]。
2.2 复杂交通环境影响
主要受一定范围其他车辆遮蔽和阻挡的视觉感知,如城市道路中前方公交车对随后小型车的视觉遮挡,跨线车辆对后方摄像头和其他传感器的影响。在复杂车流环境下,高精度和低延迟就成为了首要的自动驾驶需求[4-6]。
2.3 标志线工作状态的影响
标志线的污损及材料老化导致交通标志线服役寿命不足。交通标志正常服役的另一大基础是连续性和服役期与有效寿命匹配。现有交通标志线在实际工作环境中,其寿命往往低于道路面层,需要反复涂划,既影响交通通行,又增加了道路养护费用,同时降低交通安全[7-8]。
因此,亟需一种不受交通载荷和路面环境影响且长寿命的新型道路标志。同时,随着基于各类传感器的计算机识别技术的高速发展,使得满足自动驾驶需求的新型标志及识别系统已成为可能。
3 道路隐形指示标志的创新设计
3.1 道路隐形指示标志的基本定义
道路隐形标志是一种埋设于道路上面层之下,可以被车辆感知的交通标志。相比于现有的涂划于道路表面的道路标志(显形道路标志),埋设在道路面层之下的交通标志不可被人眼感知或图像识别,因而命名为道路隐形标志。道路隐形标志的识别方式为传感器识别,传感器在完成识别后,可直接将电信号转化为数字信号并引导自动驾驶。现有道路标志采用的识别技术路线为:首先通过视觉或视觉仿生传感器获得路面标志的图像,通过驾驶员或图像处理手段获得图像信号,再将获得的图像信号转化为数字信号或电信号,进而对驾驶行为进行决策,最终表现为一般的驾驶行为;道路隐形标志则直接获得路面以下的信号,将其转化为电信号或数字信号,并传递给驾驶员或直接接入自动驾驶的数据库进行决策,最终也表现为一般的驾驶行为。道路隐形标志与显形标志的明显区别在于无须进行图像识别,从底层逻辑优化了道路标志的信号转化,提高了响应速度。
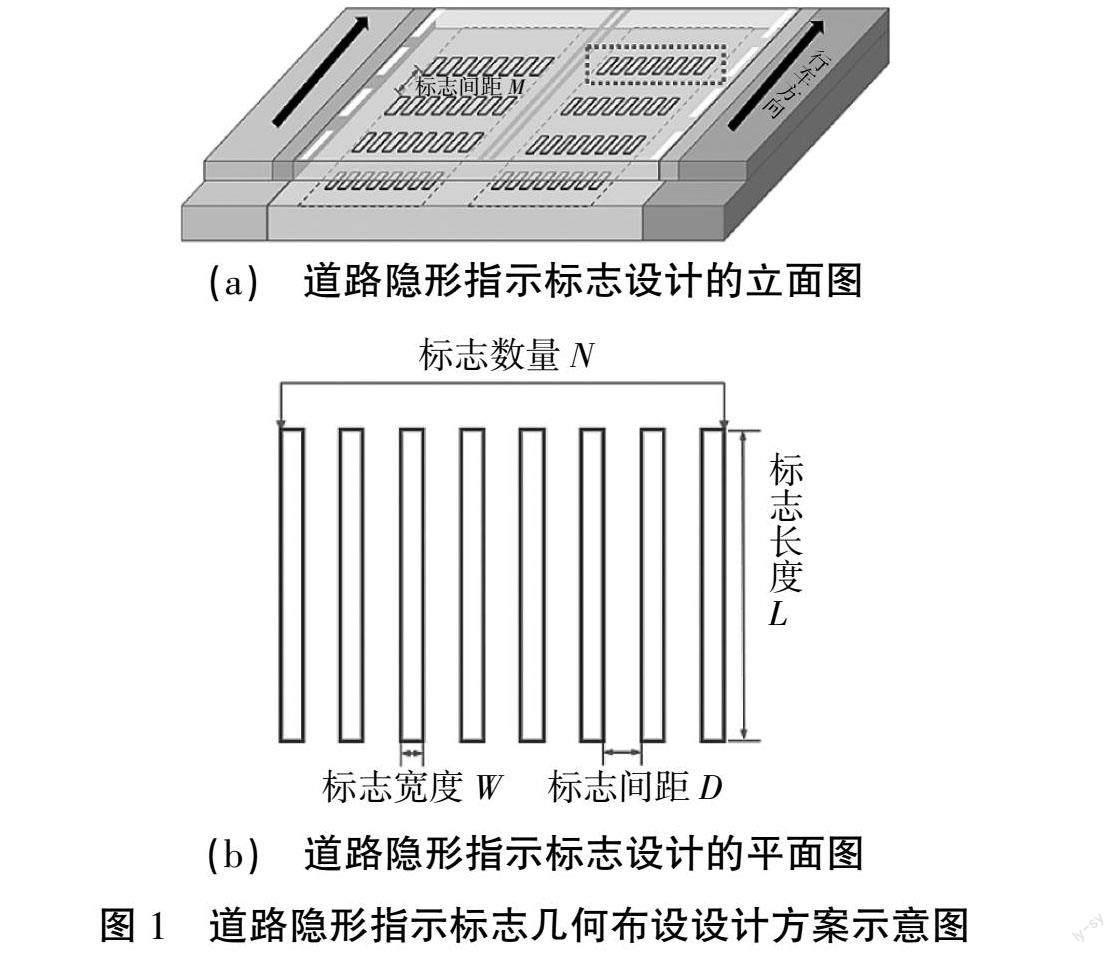
3.2 道路隐形指示标志的几何设计
为了确保道路隐形指示标志的基本定位能力,其几何特性是最重要的设计指标。图1展示了道路隐形指示标志设计过程中最基本的5个几何特征:标志的数量(N)、标志的长度(L)、标志的宽度(W)和同一组道路隐形标志块内部各标志的间距(D)和相邻组道路隐形标志块外部的标志间距(M)。通过与行驶速度和步进频率测试方法的耦合,可以完美匹配获取上述几何特性,这为后续精确定位提供了基础。在这种设计方案中,所有标志都设置在行车道的中间,其目的是确保所有类型的汽车都能识别这些信息。同时,几何设计的总宽度不宜过大,以便提高传感器与车辆耦合过程中的适配性。上述5个基本的几何特征可以满足对车道宽度、车辆位置和行驶速度的要求。同时,道路隐形标志检测系统对编码的基本要求是确保信息密度。如图1所示的道路隐形指示标志几何设计方法,其编码具体方式为存在性编码,即所在位置是否具有可识别的标志,具有可识别性则输出1,不具有可识别性则输出0,则在标志数量设计为8时即可形成一个八位二进制编码。利用八位二进制编码的不同组合形式可以有效进行车道导向和地理位置导向(表1)。
(a) 道路隐形指示标志设计的立面图
(b) 道路隐形指示标志设计的平面图
目前使用的道路交通标志的总数还比较少,这使得八位编码可以有效地表示现有的交通标志。通过道路隐形指示标志的设计和使用,将有效提高自动驾驶的驾驶行为决策的效率,从而提高复杂环境下的道路行车安全。
对比现有显形道路标线所存在的老化开裂、易磨损、雨夜反光性不足和振荡标线失能等安全隐患,道路隐形标志的一个显著特点是具有长寿命性。其布设原则是将道路隐形标志置于上层路面之下,该设计目标是保证道路隐形标志能够被检测到,同时又得益于上层路面的保护,有效地延长了道路隐形标志的使用寿命。从理论上讲,道路隐形标志的使用寿命和上面层的使用寿命基本相同。进而,道路隐形标志可以延长交通标志的使用寿命,避免现有显形道路存在的因标志性能下降而导致交通安全隐患的问题,进而提高道路交通安全和通行能力。
3.3 道路隐形指示标志的材料设计
道路隐形指示标志的具体涂划材料应当经过反复多次的材料试验决定。本文提出基于瞬变电磁法(TEM)测试时的材料关键属性。TEM测试感应电压V算法如下
V(t)=, (1)
式中:k1為常数;I为发射电流;q为线圈面积;σ 为介质电导率;t 为时间。
而TEM测试过程中一次场的传播τ速度为
?子=2?仔, (2)
式中:ρ为均质介质的电阻率;μ0为介质的磁导率,在空气中等于 4 π×107 h/m;t为瞬时场的扩散时间。
上述公式表明,检测的具体内容与被穿透层的电导率、电阻率和磁导率密切相关。现有的研究表明,沥青材料的介电常数[9]约为 2.8~3,而沥青混凝土材料的介电常数[10-12]为4.5~8。金属材料的介电常数与沥青混凝土的介电常数明显不同,因此可以产生一个明显的感应电场(二次场)。基本原理图如图2所示。
3.4 道路隐形指示标志的检测与识别
道路隐形标志的识别精度和速度是整体设计的关键点。现有技术表明,三维探地雷达(3D Ground-Penetrating Rader, 即3D GPR)在识别异介质层的形状和深度的能力是卓越的[13],这为道路隐形指示标志的探测提供了高可行性;同时,经过一系列的初步技术验证,电磁探测设备也具有探测金属介质或其他可以激发二次场介质材料几何特性的性能,电磁探测设备主要采用的探测方法包括瞬变电磁法(TEM)、平衡线圈法(Balanced Coil, BC)等。相比于探地雷达,电磁检测的方法更具有经济性,但其精度受地下介质的复杂程度、设备的灵敏度等因素的影响,因此,需要通过不断实验来优化提高电磁检测的精度以满足不同场景下的特定需求。两者的设计检测方法如图3所示。
三维探地雷达(3D GPR)的基本组成包括发射天线、接收天线和图像处理设备,其工作原理是:利用发射天线发射电磁波,由于不同层间的介电常数不同,其层与层之间会发生反射和折射,再通过接收天线接收这些返回的回波(A-扫描信号),并对回波进行数据处理后形成B-扫描图像,即完成了对不同目标的探测、识别和定位工作。其工作原理如图4所示。
(a) 三维步进探测方案
(b) 探测器具体排布方案
相比于普通的探地雷达(GPR)技术,三维探地雷达(3D GPR)具有下述更突出的优势。
1)雷达信号源输出的频率分量可以精确控制,而且每个频率分量的能量相等。
2)通过控制雷达主机的信号带宽,可以有效抑制噪声,从而提高灵敏度。
3)探地雷達信号是一种频域信号,可以方便地应用频域的信号处理方法进行数据分析,100 MHz~3 GHz,可由用户根据需求设定,同时兼顾探测深度和高分辨率的需要。
同时,在三维GPR方法中采用了阶梯式频率脉冲测试方法。阶梯式频率脉冲是指GPR的工作频率以阶梯式方式进行,GPR发出的信号从起始频率(f. start)到终止频率(f. stop),在一个扫描周期内的频率间隔Δf,而其工作带宽B和频率间隔Δf为
, (3)
式中:B为工作带宽;f. start为起始频率;f. stop为终止频率;Δf为频率间隔;N为步进频率次数。
同时,使用数字频率信号源代替传统的锁相循环,步进频率的三维探地雷达可以产生0.5~10 ms的扫描周期,包含1 500个从100 MHz~3 GHz不同频率的信号。由于步进频率的三维探地雷达是一个同相位接收器,保证了整个扫描周期的信号在毫秒内可以被完全利用。同时,步进频率扫描技术可以通过编程以控制测试性能,针对不同的测试目的,使用不同的频率范围来控制整个频谱。步进频率信号模型如图5所示,初始频率f0,步进频率为Δf,第n个时间段的频率为f0+(n-1)Δf。
与三维探地雷达技术相比,电磁探测技术采用不同磁通量对应于不同的电磁场的基本原理,其突出优势在于其成本低。瞬变电磁法(TEM)和平衡线圈法(BC)是电磁探测技术采用的2种主要探测方法,2种探测方法应用于道路隐形标志方面各有优劣势。
瞬变电磁法(TEM)也称时域电磁法(Time Domain Electromagnetic Method)。瞬变电磁法共使用2个线圈进行接收,一个为不接地的返回线圈,另一个为恢复线圈。不接地的回流线圈发射一个脉冲电场(主场)来激发被测物并产生一个二次场。恢复线圈接收二次场在发射脉冲之间的时间变化。通过分析接收到的二次场数据,可以确定异常电场的位置,从而发现该物体。瞬变电磁法工作示意图如图6所示。
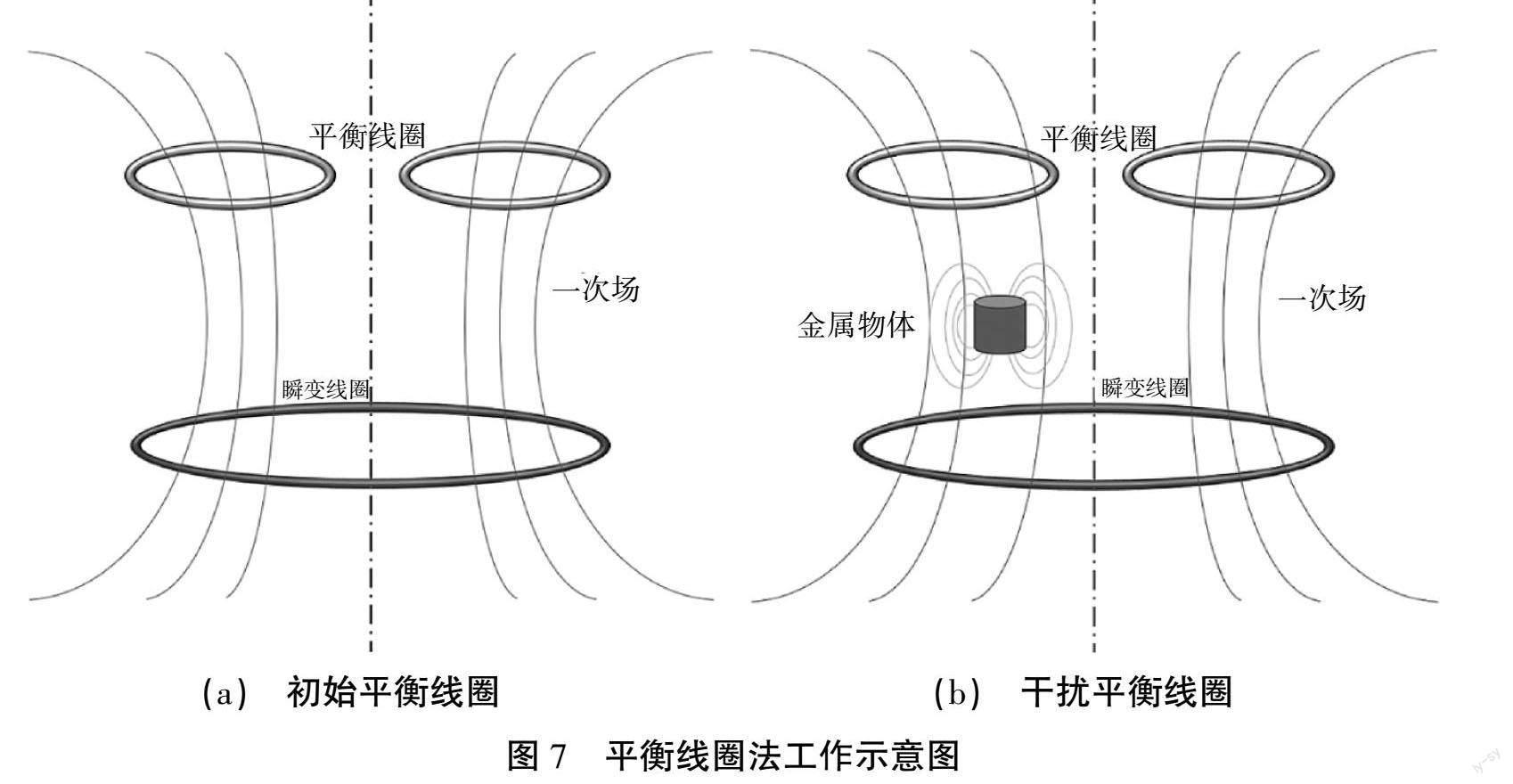
平衡线圈法的工作原理如图 7 所示。发射线圈和接收线圈在自下而上的方向上相互平行排列。一对双胞胎接收线圈使用平衡差分连接到一个差分放大器电路。当没有金属时,发射线圈的磁场在双子接收线圈中感应出大小相等但方向相反的电动势。这导致感应电动势相互抵消,接收线圈的磁场处于平衡状态。当金属物体进入磁场范围时,电磁感应在金属内部产生感应电势,产生涡流,从而激发变化磁场。由于金属物体相对于2个接收线圈的位置不同,接收到的信号信息也有所不同。差分电路输出的电平信号反映了金属的大小和特性。2个接收线圈接收到的信号的振幅和相位根据金属物体的位置、大小、导电性和渗透性而变化。这种振幅和相位信息被用来探测和区分金属异物。与瞬变电磁法相比,平衡线圈法的探测深度较浅,但可用于大面积区域的快速探测。
4道路隐形指示标志的应用与前景
4.1检测预期结果
三维探地雷达技术通过对不同探测方法的原理和技术发展状况进行预估,将具有更高的预期结果或期望值。通过读取编码信息并将电信号转换为数字信号,这一结果可以直接写入自动驾驶的驾驶行为决策数据库中。同时,三维探地雷达技术的检测结果也将通过中央处理器传输到用户界面,以引导驾驶员的行为。
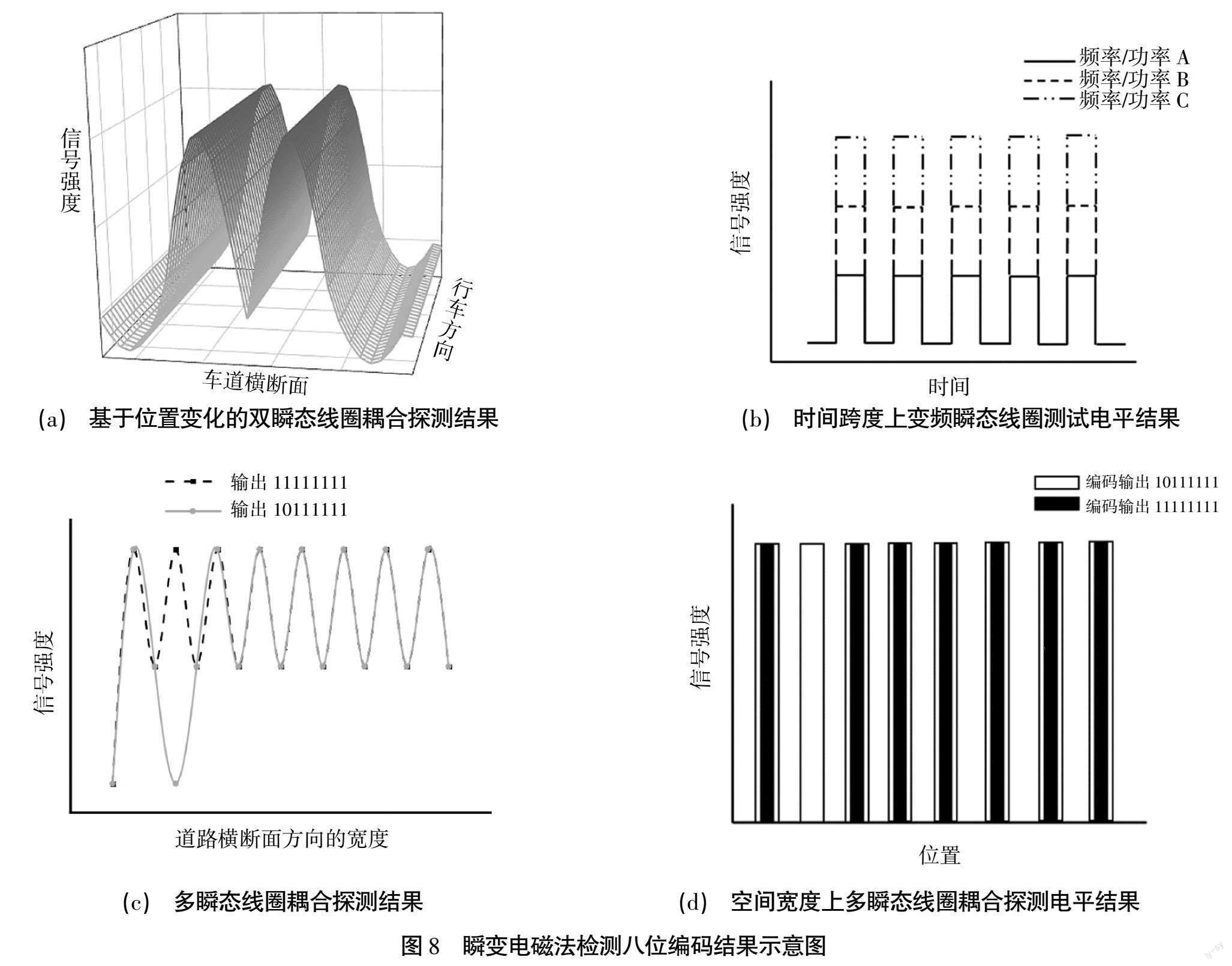
瞬变电磁法、平衡线圈法等方法通过探测上面层下部的异质材料,进而获得信号振幅以得到相对应的道路隐形标志。探测过程中将多个探测器以固定排列方式耦合,可以检测整个行车道范围内的信号振幅变化。通过将图8(a)所示的频率信号转换为图8(b)所示的电平信号,可以有效地获得关于标记存在的信息。车辆前进速度和探测周期的组合可以测试长度,结果如图8(c)和8(d)所示。瞬变电磁法和平衡线圈法可以有效地降低设备成本,同时为整个系统的简便化提供更为可靠的技术路线。
4.2 布设位置预期成果
道路隐形标志的结构设计采用了保护层设计的概念,如图9所示。上层路面设计为保护层,以保证现有道路标线和道路隐形标志同时存在。沥青混凝土路面上层的设计寿命不低于5 a,维护周期为2~3 a。道路隐形标志的设计是与上层路面同时更换。根据弹性层体系理论和基本假设,铺设在上层下面的道路隐形标志材料几乎不会被损坏,为其长寿命提供了理论依据。道路隐形标志系统整体设计模型示意图如图10所示。利用道路隐形标志几何布设对应的八位二进制编码进行车道和相关经纬度等地理位置的布设,通过现有GPS定位作为对应位置的确认以确保道路隐形标志布设位置的准确性。
图9 多传感器耦合定位示意图
图10 道路隐形标志系统整体设计示意图
4.3 综合应用前景
关于自动驾驶中的车辆定位的研究,各课题组都在快速展开并有效进行。既往研究表明,车辆的精确空间定位需要多个传感器之间的协作。本文描述的道路隐形标志为车辆定位提供了一种新形式的基础设施支持,其提供了超越现有标线系统的车道间的精确定位和交通规划潜力。道路隐形标志体现了一种新形式的预感设计,通过提前编写道路交通指令来规划前方路线,并通过连续检测为自动驾驶提供连续的交通信息。现有的标线系统受其视野的限制,不能有效地预测前方的情况,因此道路隐形标志更适合未来的发展。
参考文献:
[1] GIBBONS R, ANDERSEN C, HANKEY J. Wet night visibility of pavement markings[J].Transportation research record: journal of the transportation research board,2005,1911(1):113-122.
[2] THOMAS M W, CAROL S, VICTORIA S D, et al. Volcanic ash impacts on critical infrastructure[J]. Physics and chemistry of the earth,2012,45/465-23.
[3] WOLSHON B. Transportation's role in emergency evacuation and reentry[J]. Nchrp synthesis of highway practice, 2009.
[4] WANG C, LI Z, FU R, et al. Lane change safety assessment of coaches in naturalistic driving state[J].Safety science,2019(119):126-132.
[5] YUAN W, FU R, GUO Y S, et al. Drivers' lane changing intention identification based on visual characteristics[J], CHINA journal of highway and transport, 2013,26(4):132-138.
[6] SAINA R, ABDOLLAH H, ALI K, et al. Identification of Anomalies in Lane Change Behavior Using One-Class SVM[C]//2016 IEEE International Conference on Systems, Man, and Cybernetics: SMC 2016, Budapest, Hungary,9-12 December 2016,pages 4082-4877,[v.6].:Institute of Electrical and Electronics Engineers,2016:4405-4410.
[7] ABBOUD N, BOWMAN B. Cost- and longevity-based scheduling of paint and thermoplastic striping[J]. Transportation research record journal of the transportation research board, 2002(1794):55-62.
[8] MULL, D.. Paint Pavement Marking Performance Prediction Model That Includes the Impacts of Snow Removal Operations[R].
[9] LI Q S, HEI D P, ZHANG H. Research on dielectric characteristic of guss asphalt concrete[J].Highway Engineering,2015 40(5):134-140,106.
[10] AU P A, KOMACKA J. A comparison of dielectric constants of various asphalts calculated from time intervals and amplitudes[J].24th russian-polish-slovak seminar on theoretical foundation of civil engineering,2015(111):660-665.
[11] PIUZZI E, CANNAZZA G, CATALDO A, et al. Measurement system for evaluating dielectric permittivity of granular materials in the 1.7-2.6-GHz Band[J]. Ieee transactions on instrumentation and measurement,2016, 65(5):1051-1059.
[12] ZHANG B, NI Y W, ZHONG Y H, et al. Influence of temperature on the dielectric properties of asphalt mixtures[J].Journal of materials in civil engineering,2022,34(4):04022008.
[13] JOHNSTON B J, RUFFELL A, WARKE P, et al. 3DGPR for the Non-Destructive Monitoring of Subsurface Weathering of Sandstone Masonry[J].HERITAGE,2019,2(4):2802-2813.
猜你喜欢
中国科技纵横(2017年4期)2017-05-16
移动通信(2016年24期)2017-03-04
民生周刊(2016年21期)2016-11-19
艺术科技(2016年9期)2016-11-18
电脑知识与技术(2016年24期)2016-11-14
文理导航(2016年30期)2016-11-12
家用汽车(2016年9期)2016-11-04
文艺生活·中旬刊(2016年10期)2016-11-04
环球时报(2016-08-16)2016-08-16
现代经济信息(2016年7期)2016-05-19