倾斜摄影空中三角测量数据解算优化研究
2024-03-25 15:26马喜飞
科技创新与应用 2024年8期
马喜飞
摘 要:针对倾斜摄影空中三角测量解算精度低、易分层、效率低的问题,该文对空中三角测量原理进行深入分析,并结合倾斜摄影数据的特点,提出几种空中三角测量数据解算优化方案,并通过实际数据对该文提出的方案进行验证。通过对实验数据分析可知,该文提出的几种方案可以有效提升倾斜数据空中三角测量解算的精度,并且解算成功率高、效率高,可以为倾斜摄影空中三角测量数据高质量的解算带来借鉴。
关键词:倾斜摄影;空中三角测量;空三加密优化;影像;蒙板
中图分类号:P231 文献标志码:A 文章编号:2095-2945(2024)08-0041-04
Abstract: In view of the problems of low accuracy, easy stratification and low efficiency of aerial triangulation (AT) solution for oblique photography, this paper deeply analyzes the principle of aerial triangulation and puts forward several optimization schemes of aerial triangulation data according to the characteristics of tilt photographic data, and the scheme proposed in this paper is verified by the actual data. Through the analysis of the experimental data, it can be seen that several schemes proposed in this paper can effectively improve the accuracy of aerial triangulation of inclined data, and the solution has high success rate and high efficiency, thereby can be used as a reference for the high-quality solution to aerial triangulation data of oblique photography.
Keywords: oblique photography; aerial triangulation (AT); aerial triangulation optimization; image; mask
随着无人机低空飞行和载荷能力的逐渐提升,数码相机重量的不断减轻和组装能力的不断加强,采用无人机搭载倾斜摄影多镜头相机进行低空飞行,并采集倾斜摄影数据用于测绘产品的生产成为了目前主流的航空摄影方式。然而,在实际作业中可以发现,采用目前已有的软件对倾斜摄影数据进行空中三角测量解算,存在数据解算精度低、空三成果易分层、解算效率低等问题。针对存在的问题,很多学者对其进行了研究,吴英梅[1]、杨朋荷[2]、邵金鹏[3]从多个角度对倾斜摄影空三数据解算进行了研究,提出了比较实用的解决方案,并用于实际生产中,对多种优化方案的可行性进行了验证。邰建豪等[4]从倾斜数据高冗余方面出发,探讨了冗余数据的存在原因,并针对冗余数据的特点,开发相应的软件进行冗余数据的自动剔除,提升了数据的解算效率。本文在分析了空中三角测量的原理后,提出多种方案对倾斜数据空中三角测量解算进行优化,并以多个实际项目数据为数据源,对本文方案的可行性进行了验证,取得了较好的效果,为同类数据的解算带来借鉴。
1 倾斜摄影空中三角测量原理
空中三角测量解算也被称为空三加密,是指利用相片内在的几何特征,根据少量的野外像控点,在室内进行同名点加密,并求得同名点的平面和高程的准确位置的一种测量方案。空三加密的整个流程主要包括影像金字塔构建、特征点检测与图像相似度计算、特征匹配与平差调整等[5-6]。而在进行空三加密时,其主要依据的参数是相机参数、拍照时影像的位置和姿態、影像的表征质量等。由此可见,准确的参数和高质量影像,可以有效提升空三加密成果质量,以便得到更高精度的测绘产品。
2 倾斜摄影空中三角测量优化方案
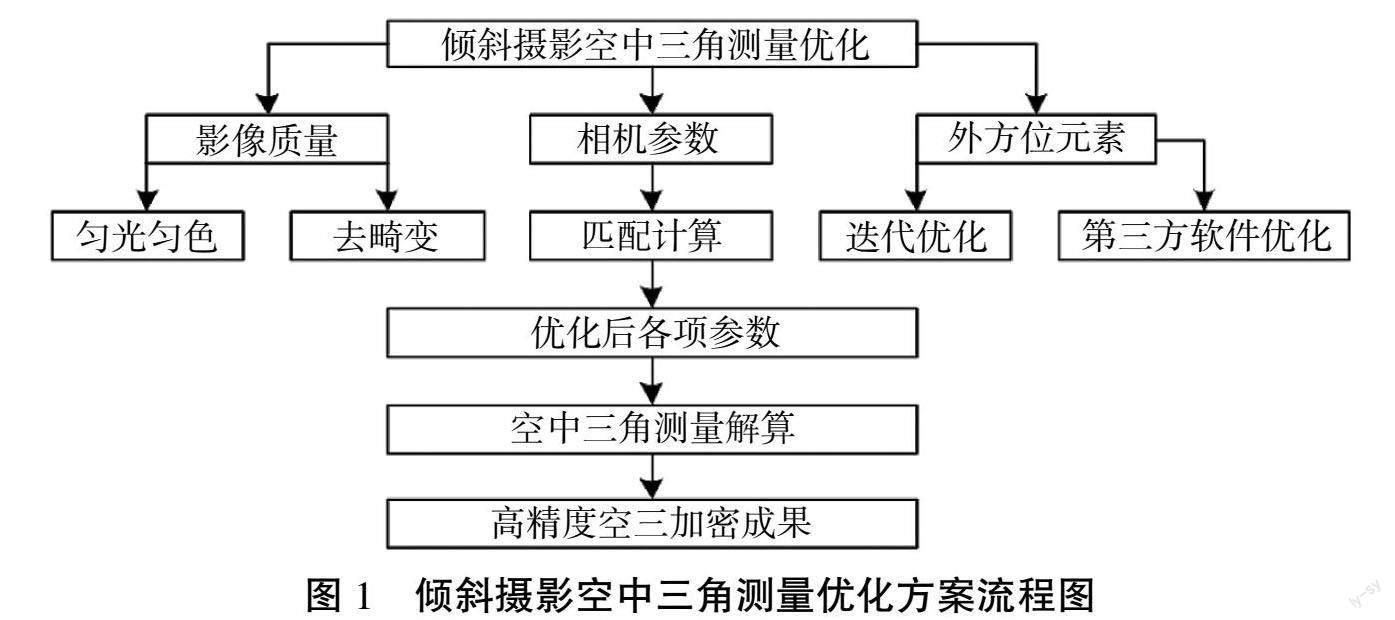
倾斜数据的解算主要取决于影像质量、相机参数、外方位元素,从这三方面进行数据优化,可以有效提高数据的解算精度、成功率和效率,本文的数据优化方案流程如图1所示。
2.1 影像质量优化
影像质量是指影像的表征质量和影像每个像素点的精度。影像的表征质量即影像所表现出来的特性,如影像明暗度、曝光度、对比度和色差等[7]。影像像素的精度是指影像每个像素点的变形大小,目前常见的影像畸变有桶形和枕形2种,这2种的变形特点是影像中心点不存在畸变,越往影像边缘,变形越大。对于影像的表征质量,可以采用匀光匀色的方法来提高。由于倾斜摄影搭载的5个相机在曝光时的进光量不同,因此其获取的影像存在明显的明暗度不一致,需要对其进行匀光匀色处理。常采用的方法是利用一张地物信息丰富,表征质量良好的影像为模板,对所有影像进行批处理匀色,从而提升影像质量[8]。也可以结合每个镜头影像的不同表现,人为地调整影像的各项参数,并将调整的各项参数记录下来,然后按照同样的参数,对单个镜头的所有影像进行批处理,从而提升影像的质量。去畸变主要从2方面入手,即利用准确的相机检校报告,对影像进行纠正,从而得到去除畸变后的影像成果。在没有准确的相机检校参数时,也可以使用蒙板,来约束用于进行空三加密的影像范围,从而降低影像畸变带来的影响。
2.2 相机参数优化
对于倾斜相机来说,由于其倾斜角大,通常为45°,而且镜头多,如果采用露天检校场对多镜头相机进行检校,其检校费用非常高,而且能够提供这样检校服务的地方较少。如果采用邮寄方式进行检校,在运输过程中,相机存在被损坏的风险,而且震动等外界因素也会导致相机参数发生改变,导致检校参数无法使用。为了节约成本,一般采用软件自检校的方法。其思路是采用少量的照片进行空三加密,然后将外业采集的像控点进行转刺,然后进行平差迭代解算,直到平差精度趋于稳定,然后导出每个镜头准确的焦距和像主点坐标值,从而获得更精确的相机参数,起到优化相机参数的目的。
2.3 外方位元素优化
对于无人机倾斜摄影数据来说,由于无人机姿态不稳定等原因,导致无人机安装的姿态设备获取的影像曝光时的姿态值与真实值相差较大。在数据解算时,如果把影像的姿态值导入并进行空三加密解算的话,会导致空三加密解算失败。在实际作业中,一般只使用每个影像对应的空间位置坐标值。空三加密解算主要参照每张影像的位置坐标值,在进行解算的过程中,因为导入的外方位元素值准确度较低,因此空三加密后的结果出现分层、解算失败的比率较高[9]。目前对外方位元素的优化主要从两方面入手,一种是通过不断空三加密解算和迭代平差,直至空三加密结果符合项目要求为止;另一种是通过不同软件组合来进行数据的解算,首先用一款软件获取精度较低的外方位元素,然后用另外一款软件,将精度较低的外方位元素作为输入数据,导入软件中,进行高精度数据的解算,从而完成外方位元素的优化。
2.4 剔除冗余无效影像
空三加密优化,除了对输入的相机参数、影像质量、外方位元素优化外,还有一个很重要的方面就是剔除不参与后续模型生产的冗余无效影像。倾斜摄影相对传统的垂直摄影来说,有一个很大的区别就是倾斜摄影数据重叠度高,影像数量多。数据越多,软件在解算时,需要的时间越多,而且平差难度更大,出现平差不收敛而导致失败的比率会提高。在对冗余影像进行处理时,可结合任务范围线,镜头与航线之间的关系,地形以及地物之间的关系,把范围线外面、不参与模型生产或者不影响模型质量的影像进行剔除,这样数据量就会减小,可以在一定程度上提升影像解算的效率和精度,而且可以提高平差收敛的比率,让倾斜空三加密解算更容易成功。
3 案例分析
案例一:该数据来源于某城区建模项目。在航摄时,由于航摄周期较长,加上航摄时天气多变,导致航摄影像色差较大,太阳光被建筑物遮挡而产生的阴影较多。采用Context Capture对获取的原始数据进行空三加密解算,在解算过程中,阴影区域匹配的错误点较多,整体的空三加密结果精度差,不能满足项目要求。为了解决加密点精度低的问题,笔者在所有航摄影像中,找了一幅地物信息丰富、亮度适中的下视镜头影像作为模板,采用易拼图软件,对所有航摄影像进行匀光匀色处理。处理完成后,采用人机交互的方式,对所有影像进行查看,影像亮度适中,纹理比较清晰,整体色调基本一致。在保持其他参数不变的情况下,对处理后的影像进行空三加密解算。通过解算报告可知,处理后的加密成果,其加密点中误差较匀光匀色前的小,粗差点也明显减少,表明提升影像质量,可以有效提高空三加密解算精度。由此可见,影像质量的提升,可以提高数据解算的精度。
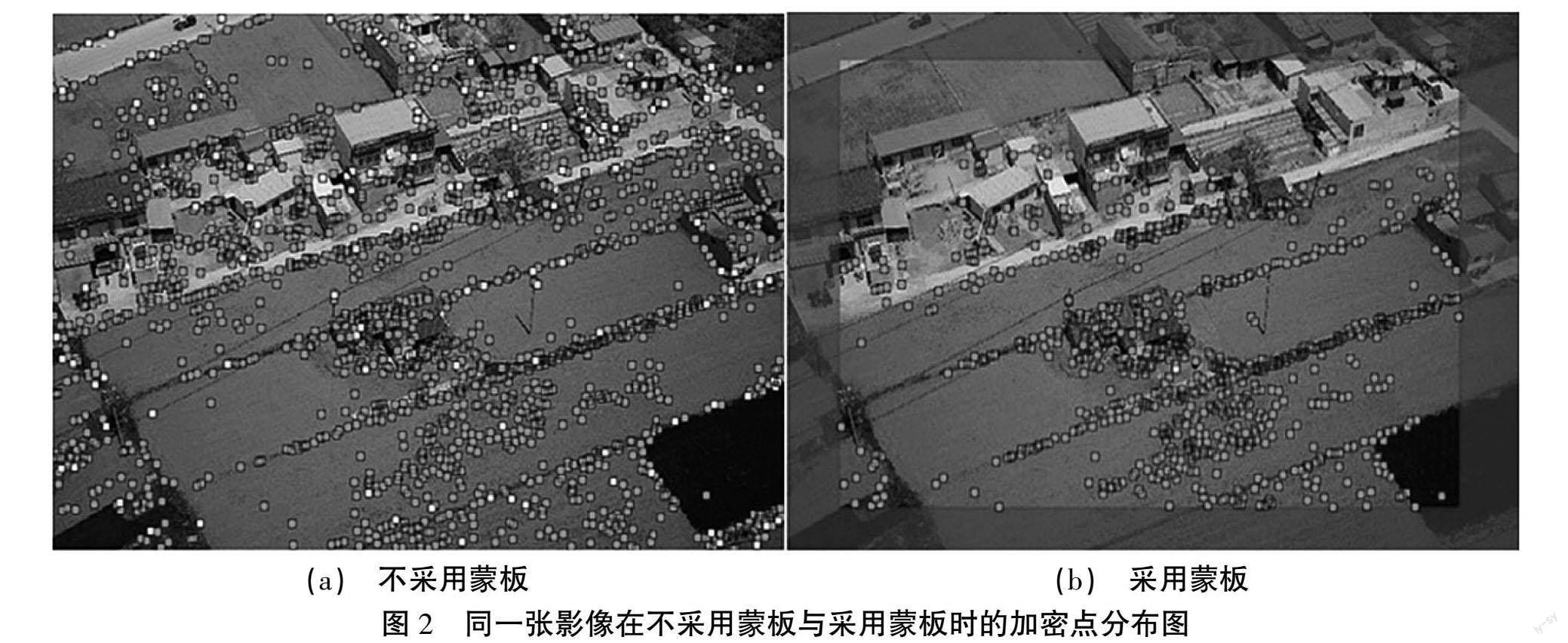
案例二:本次数据来源于农村村庄规划项目。在进行无人机航空摄影时,选择的倾斜设备为下视焦距25 mm,侧视焦距35 mm的相机。有前期从Context Capture软件中导出的精度较高的相机参数文件。将相机参数导入工程中并进行空三加密解算,在解算后,虽然空三成果未出现分层等问题,但是精度很难满足项目要求,需要解决此类问题。因为采用的相机焦距为短焦,而且在获取时,飞行的高度较低,因此航摄原始影像数据畸变较大,需要对其去畸变处理。目前,去畸变主要是通过畸变纠正软件来完成,需要用到的相机参数包括焦距、像主点偏移坐标、径向畸变和偏心畸变系数,这需要对相机进行检校,费用成本高,一般不采取这种方式。在倾斜摄影数据解算中,针对影像重叠度高这一特点,一般选用蒙板来减小影像畸变对数据解算带来的影响。蒙板是指利用和影像大小相同的一幅影像,给其命名为mask.tif,然后用黑白2种颜色对其进行填充。其中,黑色填充部分对应的区域影像不参与数据解算,白色填充部分对应的区域影像参与数据解算。本次项目航摄影像重叠度均為85%,重叠度较高,设置蒙板四边10%的像素对应区域为黑色,并将设置好的蒙板与影像数据放到同一文件夹下,让对应影像区域不参与空三解算。解算完成后,对优化前后的空三报告对比查看可知,优化前数据解算耗时15 h,加密点重投影中误差为1.1个像素;优化后数据解算耗时11.5 h,加密点重投影中误差为0.58个像素,规范固定不超过2/3个像素,表明采用蒙板进行空三解算优化,在提高效率的同时也可以提高精度。图2所示是本次采用蒙板处理某一张影像后得到的加密点分布图。
案例三:本次数据来源于农村房地一体项目。航摄时采用的5镜头相机为自己组装起来的相机,由于购买的都是35 mm焦距的相机,为了保证5个镜头获取的影像分辨率尽可能一致,人为地对下视镜头相机焦距进行了调整,将其调整为50 mm固定焦距,其余4个则调整为35 mm固定焦距。在进行数据解算时,输入调整后的焦距,数据解算失败,分析原因可能是因为焦距不准确引起的,因此对焦距进行精确解算。首先结合像控点点位分布情况,以下视镜头覆盖范围为准,挑选了120张下视镜头照片,并把对应的侧视镜头照片挑选出来,共计600张照片进行空三加密解算,并转刺了4个像控点进行平差调整,然后得到了每个镜头准确的相机参数。把得到的相机参数作为初始值填到原工程中进行空三加密解算,空三解算顺利完成,查看加密报告,加密点重投影中误差为0.45个像素,小于规范要求的2/3个像素,空三成果精度符合项目要求。由此可见,准确的相机参数,不但可以提升空三加密解算的成功率,而且也可以提升数据解算的精度。
案例四:本次数据来源于河湖确权登记。对于空三加密来说,带状数据的解算难度更大,在实际作业中,带状数据解算极易出现弯曲现象,是因为在平差时,使用的POS数据精度较低,基本上很难对像片数据进行约束,而是通过连接点将所有影像连接成一体,解出的物方坐标是虚拟坐标,是相对于第一张影像的相对值,通过不断的迭代传递,导致最终成果因弯曲而无法使用。分析原因,是因为POS数据精度较低,因此可以通过优化POS数据精度,从而解决空三数据弯曲问题。对于带状数据解算而言,目前Mirauge3D软件还是比较好用的,其在进行空三数据解算时,得到的加密点精度并不高,但是通过解算,可以得到精度较高的POS数据,而且其3个姿态数据精度也比较高。首先通过Mirauge3D软件对数据进行解算,得到优化后的POS数据,并将其导出xml文件,然后将xml文件导入到Context Capture软件中,再次进行空三数据解算。通过实际解算可以发现,采用2款软件组合进行倾斜带状影像数据的空三解算,虽然其解算效率不高,但是解决了带状数据解算弯曲问题,而且第二次解算后的成果,其加密点精度均符合目前已有的规范要求。
若只有Context Capture软件,没有其他软件的时候,解算带状数据的方法基本上只有2种,一种是通过多次对数据进行解算,并将每次解算的数据作为初始值输入到工程中,再次进行数据解算,直到解算得到符合精度要求的成果。这种方式工作量大,而且不能保证数据解算一定会成功。另一种方法是对带状数据进行分块,将一个完整的测区分成多个块,分块的地方需要有3~4条基线的重叠区域。对每块进行空三加密解算,并在重叠区域提取特征点,将特征点转刺到2个空三中,通过特征点来对分块空三进行约束,从而保证空三精度能够满足接边精度要求。这种方式作业效率虽然不高,但是很大程度上可以提升数据的解算成功率。
4 结束语
倾斜摄影空三加密是倾斜数据解算中非常重要的一个步骤,也是倾斜数据解算中最容易出现问题的一步。针对倾斜摄影空三加密存在的各种问题,笔者分析了其原因,并给出相应的优化方案,并以不同的实际项目为例,对提出的优化方案进行了驗证。通过实际生产可知,本文提出的几种优化方案,可以有效解决倾斜摄影空三存在的问题,可行性较强,可以为同类数据的解算带来借鉴。
参考文献:
[1] 吴英梅.倾斜摄影空中三角测量解算优化研究[J].黑龙江科学,2023,14(12):120-123.
[2] 杨朋荷.倾斜摄影空中三角测量解算优化研究[J].科学技术创新,2022(19):7-10.
[3] 邵金鹏.无人机倾斜摄影空中三角测量解算关键技术优化研究[J].科技创新与生产力,2022(5):49-51.
[4] 邰建豪,杨冉.无人机倾斜摄影冗余数据删除算法[J].测绘工程,2022,31(4):11-17.
[5] 王鑫.Context Capture软件空中三角测量优化研究[J].科学技术创新,2022(17):12-15.
[6] 晏军,杨银波,何元甲,等.无人机摄影测量三维建模与地形测量精度分析[J].测绘通报,2023(S1):54-58.
[7] 陈兆斌.无人机倾斜摄影测量不同像控点密度对地籍图成果精度的影响[J].科技创新与生产力,2023(2):17-19.
[8] 张懂庆,魏军,王萍.三种倾斜摄影建模软件对比分析[J].测绘技术装备,2022,24(3):114-119.
[9] 倪雅欣.基于Context Capture软件倾斜摄影空中三角测量优化研究[J].科学技术创新,2022(16):9-12.
猜你喜欢
城市地理(2017年8期)2017-11-02
科技资讯(2017年24期)2017-09-15
中国新技术新产品(2017年14期)2017-07-07
科技创新导报(2016年26期)2017-03-13
中国科技纵横(2016年21期)2017-02-13
新闻爱好者(2016年9期)2016-11-15
读写算·素质教育论坛(2016年22期)2016-11-14
戏剧之家(2016年20期)2016-11-09
文艺生活·中旬刊(2016年10期)2016-11-04
社会科学(2016年8期)2016-11-04