混合动力汽车动力系统功能分析及仿真研究
2024-03-26 17:44王燕伍庆龙姜明慧王永军
汽车文摘 2024年3期
王燕 伍庆龙 姜明慧 王永军

【歡迎引用】 王燕, 伍庆龙, 姜明慧, 等. 混合动力汽车动力系统功能分析及仿真研究[J]. 汽车文摘, 2024(3): 47-55.
【Cite this paper】 WANG Y, WU Q L, JIANG M H, et al. Functional Analysis and Simulation Research on Powertrain of Hybrid Electric Vehicle [J]. Automotive Digest (Chinese), 2024(3): 47-55.
【摘要】在混合动力设计开发前期,利用仿真软件对混合动力系统进行性能仿真和深入研究。通过阐述混合动力汽车动力系统的构型方案,分析了混合动力汽车的动力系统功能、驾驶操作模式以及控制策略。基于AVL CRUISE仿真软件,搭建了某款混合动力汽车的整车及动力系统仿真模型,并进行了整车动力性和经济性的仿真验证。仿真结果表明,混合动力车型性能和功能满足设计要求,为混合动力系统样车试验研究奠定基础。
关键词:混合动力汽车;动力系统;功能分析;建模仿真
中图分类号:U464.12 文献标志码:A DOI: 10.19822/j.cnki.1671-6329.20220231
Functional Analysis and Simulation Research on Powertrain of Hybrid Electric Vehicle
Wang Yan, Wu Qinglong, Jiang Minghui, Wang Yongjun
(Global R&D Center, China FAW Corporation Limited, Changchun 130013)
【Abstract】In the early stage of design and development for a model of Hybrid Electric Vehicle (HEV), the simulation software is utilized to simulate and study the vehicle performances. This paper elaborates the powertrain structure of HEV and the powertrain system functions, driving operation modes and control strategies of HEV are analyzed. Based on simulation software of AVL CRUISE, the whole vehicle and powertrain models of HEV are built. The simulation and analysis of the dynamic performance and economy of HEV are carried out. The simulation results show that HEV performances and functions are met with the design specification, which provide basis for test verification of further development.
Key words: Hybrid Electric Vehicle (HEV), Powertrain, Functional Analysis, Modeling and Simulation
Abbreviation
NEV New Energy Vehicle
HEV Hybrid Electric Vehicle
MicHEV Micro Hybrid Electric Vehicle
MilHEV Mild Hybrid Electric Vehicle
FHEV Full Hybrid Electric Vehicle
BMS Battery Management System
CAN Controller Area Network
DC/DC Direct Current to Direct Current converter
EMS Engine Management System
ESP Electronic Stability Program
HCU Hybrid Control Unit
HMI Human Machine Interface
HV High Voltage
HVAC Heating, Ventilation and Air Conditioning
IC Instrument Cluster
MCU Motor Control Unit
SOC State Of Charge
TCU Transmission Control Unit
NEDC New European Driving Cycle
WLTC World Light Vehicle Test Cycle
0 Introduction
At present, the pressure of energy shortage and environmental pollution across global is increasing[1-2]. Major automobile manufacturers around the world have strengthened the research and development of New Energy Vehicle (NEV) and put them into the markets[3]. The ratio of traditional vehicle population in China is still high with much potentials for carbon reduction, and Hybrid Electric Vehicles (HEV) among the traditional vehicles are also playing vital role in carbon reduction process for low carbon mobility[4] to realize double carbon targets, market share for traditional vehicles including HEV will be 50% in 2035, with market volume of 40 million units in China. Even in the context of electrification transformation[4] , HEVs are important types of vehicles for traditional vehicles to contribute to carbon reduction.
Motivation of adopting HEV in product portfolios for automotive manufacturers is mainly for low carbon operation and fuel saving. In general, HEV contributes 7%~32% of fuel savings[5]. Fuel saving is also required for enterprise car fleets by Regulation of Dual Credits for passenger vehicle enterprises[6].
During research and product development process, simulation tools are crucial and key parts of optimization for research objects and products, especially for handling the complexity of HEV systems. Anselma, et al.[7] elaborated that modelling approach is one of the design methodologies in next generation design tools for HEV that limited the powertrain system functions. Zhang, et al.[8] also concluded that models need comparison with simulation tools to achieve optimized model. Zhao, et al.[9] conducted a research on driving cycle aware energy management for HEVs to predict future driving tasks and energy management.
Based on a Mild Hybrid Electirc Vehicle (MilHEV), this paper elaborates the powertrain structure and analyzes the system functions, driving modes and control strategies. Based on AVL CRUISE simulation software, the whole vehicle and powertrain models of the HEV are built, and the comprehensive performance simulation and analysis for HEV are conducted to provide basis for further development with prototype vehicles.
1 Structural Scheme of Powertrain
There are 3 types of HEVs in the markets, including Micro Hybrid Electric Vehicle (MicHEV), Mild Hybrid Electric Vehicle (MilHEV) and Full Hybrid Electric Vehicle (FHEV)[10-12].
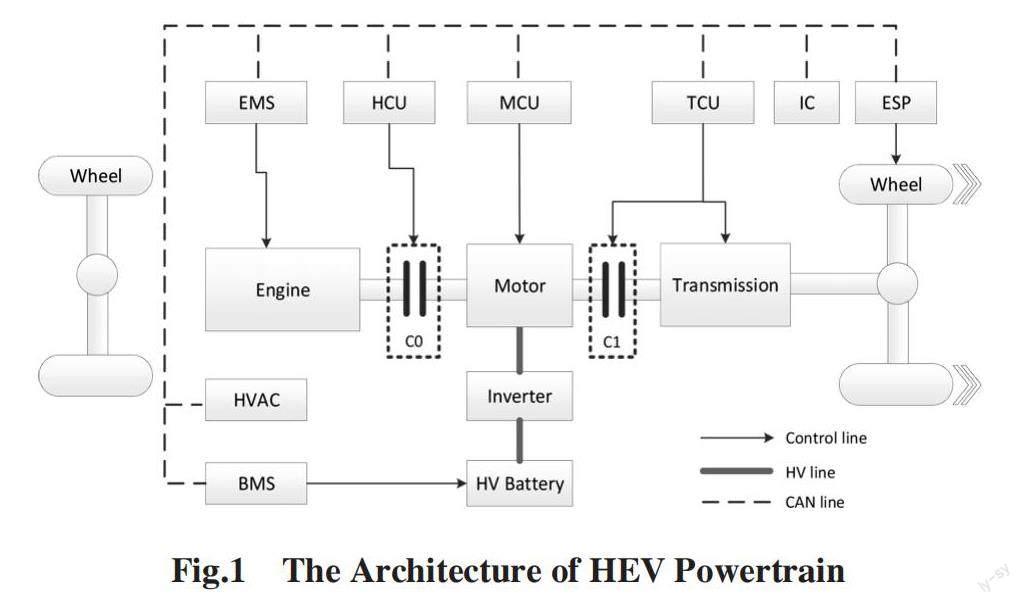
Due to the advantages of higher fuel saving potential including fully transmission gears utilization, small motor, and easier layout for less design and development efforts, MilHEV is chosen as research object which is part of high end product portfolio. The powertrain architecture of target MilHEV involved in this paper is shown in Fig.1, which is a typical parallel HEV, with a motor and an engine connected through the clutch C0, and the motor and the transmission are connected through the clutch C1.
The controllers in HEV are supposed to control the corresponding components and realize the functions designed for HEV. Different controllers communicate with each other through CAN network. Moreover, HCU cooperates with these controllers to realize different powertrain system functions and modes.
HEVs have the advantages of dynamic and economy performance and different powertrain system functions can be realized by control strategies[13-15], as shown in Fig.2. The functions of various driving modes will be described in the following chapter.
2 Powertrain System Functions
2.1 Vehicle Stop Mode
The vehicle stop mode refers to a condition before the vehicle is driven, and the vehicle start key is not triggered at this time. When the shift lever is in P or N gear, the start key state is off and the vehicle is not power-up, then HCU shall control the HEV to shift into vehicle stop mode.
In this mode, the states of power assemblies are controlled as follows: the engine is in the shutdown state, the clutch C0 is in the disengaged state; the motor is in the shutdown state; the clutch C1 is in the disengaged state; the HV battery is neither charged, nor discharged.
2.2 Pure Electric Drive Mode
When the power of hybrid electric comes, if the required torque for driving the vehicle is relatively small and the output torque of the motor can meet the driving torque demand of the vehicle, the vehicle can be driven by motor alone.
When the shift lever is in P or N gear, the start key state is activated and started, and all of the following conditions are met, then HCU shall control the vehicle to enter into the pure electric drive mode.
(1)HV battery SOC is greater than the specified value, i.e. SOC> 35%.
(2)The engine has been warmed up, and the engine water temperature is greater than the specified value, i.e. > 40 °C.
(3)The HVAC has neither heating, defrosting, nor defogging requirements.
(4)The driving power of the vehicle is less than the specified value, indicating that the driving demand can be met in the pure electric drive mode.
(5)The vehicle speed is less than the specified value, i.e.< 80 km/h.
In this mode, as is shown in Fig.3, the states of power assemblies are controlled as followings:
(1)The engine is in shutdown state.
(2)The clutch C0 is in disengaged state.
(3)The motor is in electrically driven state.
(4)The clutch C1 is in engaged state.
(5)The HV battery is in discharged state.
2.3 Drive Power Generation Mode
In the vehicle driving process, if the SOC of HV battery is insufficient, HCU will control the vehicle to enter into the drive power generation mode. By adjusting the engine to operate in an economically efficient working area, the engine will be used to drive the vehicle, and the extra energy output of the engine will charge HV battery.
When the shift lever is in D or R gear, the start key state is activated and started, and all of the following conditions are met, then HCU shall control the vehicle to enter into the drive power generation mode.
(1)The SOC of HV battery is less than the specified value, i.e. SOC< 35%.
(2)The vehicle driving torque demand is less than the external characteristics torque of the engine, which means that the engine alone can meet the vehicle driving demand, and the excess energy output of the engine can be used to charge the HV battery through the motor generation.
In this mode, as is shown in Fig.4, the states of power assemblies are controlled as followings:
(1)The engine is in the driving state.
(2)The clutch C0 is in the engaged state.
(3)The motor is in the power generation state.
(4)The clutch C1 is in the engaged state.
(5)The HV battery is in the charged state.
2.4 Engine Drive Mode
During vehicle driving, if HV battery SOC is sufficient and the engine is running in an area with high efficiency, the vehicle can be driven by the engine working independently.
When the shift lever is in the D or R gear, the start key state is activated and started, and the SOC of HV battery is greater than the specified value, i.e. SOC> 35%, and if any of the following conditions is met, then HCU shall control the vehicle to enter into the engine drive mode.
(1)The engine water temperature is less than the specified value, i.e. < 40 ℃.
(2)The HVAC has heating, defrosting and defogging requirements.
(3)The driving power of the vehicle is greater than the specified value, which means that the driving demand of the vehicle cannot be met only by motor drive. The engine needs to be put into running and driving the vehicle.
(4)The vehicle speed is greater than the specified value, i.e. > 80 km/h.
In this mode, as is shown in Fig.5, the states of power assemblies are controlled as followings: The engine is in the driving state, the clutch C0 is in the engaged state, the motor is in the follow-up state, the clutch C1 is in the engaged state, and the HV battery is neither charged nor discharged.
2.5 Combined Drive Mode
During the hybrid electric vehicle driving, if the required torque for driving the vehicle is relatively large, the motor and engine shall be jointly driven to meet the driving demand of the vehicle.
When the shift lever is in D or R gear, the key state is activated and started, and all of the following conditions are met, then HCU shall control the vehicle to enter into the combined drive mode.
(1)The HV battery SOC is greater than the specified value, i.e. SOC> 35%.
(2)The vehicle driving torque demand is greater than the external characteristic torque of the engine, which means the engine driving alone will not meet the vehicle driving demand, and the motor is required to assist the torque to further meet the vehicle driving demand.
In this mode, as is shown in Fig.6, the states of power assemblies are controlled as followings: the engine is in the driving state, the clutch C0 is in the engaged state, the motor is in the electrically driven state, the clutch C1 is in the engaged state, and the HV battery is in the discharged state.
2.6 Braking Energy Recovery Mode
When the hybrid electric vehicle is in the process of coasting or braking, the motor is controlled for energy recovery, and then the recovered energy will be stored in HV battery for subsequent driving, so as to achieve the purpose of energy conservation and emission reduction.
When the shift lever is in D or R gear, the start key state is activated and started, and all of the following conditions are met, then HCU shall control the vehicle to enter the braking energy recovery mode.
(1)The vehicle driving power demand is less than 0 kW. A negative driving power indicates that the vehicle has triggered the energy recovery function.
(2)The HV battery SOC is less than the specified value, i.e. SOC< 95%.
(3)The vehicle speed is within a certain range of 20 ~ 120 km/h.
In this mode, as is shown in Fig.7, the states of power assemblies are controlled as followings: the engine is in the shutdown state, the clutch C0 is in the disengaged state, the motor is in the power generation state, the clutch C1 is in the engaged state, and the HV battery is in the charged state.
2.7 Engine Start Mode
When the engine needs to be started during the hybrid electric vehicle driving, the motor can be used to start the engine, which can achieve better smoothness and comfort performance for the vehicle.
When the shift lever is in D or R gear, the start key state is activated and started,and all of the following conditions are met, then HCU shall control the vehicle to enter the engine start mode.
(1)The vehicle has traveled a certain distance, i.e.> 5 km.
(2)The powertrain system has triggered the engine start command.
(3)The engine water temperature is greater than the specified value, i.e.>-15 ℃.
(4)The HV battery SOC is greater than the specified value, i.e.>25%.
In this mode, as is shown in Fig.8, the states of power assemblies are controlled as followings: the engine is in the ignition starting state, the clutch C0 is in the engaged state, the motor is in the electrically driven state, the clutch C1 is in the disengaged state, and the HV battery is in the discharged state.
2.8 Idle Stop Mode
After the engine is started, if the vehicle has driven for some distance and the vehicle is stationary and the engine is running in the idle condition, when the engine shutdown conditions are met, the engine will be controlled to stop automatically.
When the shift lever is in P or N gear, the start key state is activated and started, and all of the following conditions are met, then HCU shall control the vehicle to enter into the idle stop mode.
(1)The speed of the vehicle is 0 km/h.
(2)The accelerator pedal of the vehicle is not depressed.
(3)The HV battery SOC is greater than the specified value, i.e. SOC> 35%.
(4)The engine has been warmed up, and the engine water temperature is greater than the specified value, i.e.> 40 ℃.
(5)The HVAC has neither heating, defrosting nor defogging requirements.
In this mode, the states of power assemblies are controlled as followings: the engine is in the shutdown state, the clutch C0 is in the disengaged state, the motor is in the shutdown state, the clutch C1 is in the disengaged state, and the HV battery is neither charged nor discharged.
3 Vehicle Operation Mode Analysis
Different vehicle operation modes are designed for the hybrid vehicle described in this paper. There are 3 vehicle operation modes, including: economic mode, comfort mode and sport mode. The driver can select the corresponding operation mode according to the driving needs. The driver can manually select operation modes through physical keys or soft switches, and the instrument cluster has different displays to remind the driver of the current operation mode status.
3.1 Economic Mode
The economic mode achieves the best economy of the vehicle and meets the needs of economic driving. The dynamic performance of the vehicle is slightly poor in this mode. The dynamic response speed of the accelerator pedal is relatively slow compared with the comfort mode and sport mode, and the HVAC is in the energy saving state in the economic mode.
3.2 Comfort Mode
The comfort mode takes into account the dynamic and economy performance of the hybrid electric vehicle. It is a comprehensive performance driving mode that pursues comfort, smooth dynamic and energy consumption. In the comfort mode, the accelerator pedal response is stable, and the electric drive system and air conditioner are not limited.
3.3 Sport Mode
The sport mode is used to achieve the best dynamic response characteristics of the vehicle. The sport mode can meet the aggressive driving requirements, and the dynamic response of the vehicle is the most sensitive in this mode. The accelerator pedal has the fastest response, the output capacity of the powertrain system is not limited in the sport mode.
3.4 Driving Mode Display
In order to further increase the Human Machine Interface (HMI) experience, different instrument display contents can be designed based on the system functions and operation modes of hybrid electric vehicle, so as to improve the driving experience of users [16]. During the running of hybrid electric vehicle, HCU sends the display signals of energy flow and operation modes to instrument cluster (IC), and then IC will display the corresponding modes information.
4 Modeling and Simulation
In the AVL CRUISE simulation software environment, the models of various components of the hybrid electric vehicle are established. Based on the above system functional analysis, the different models of control strategies are built, including pure electric drive mode, engine drive mode, combined drive mode, braking energy recovery mode and other modes.
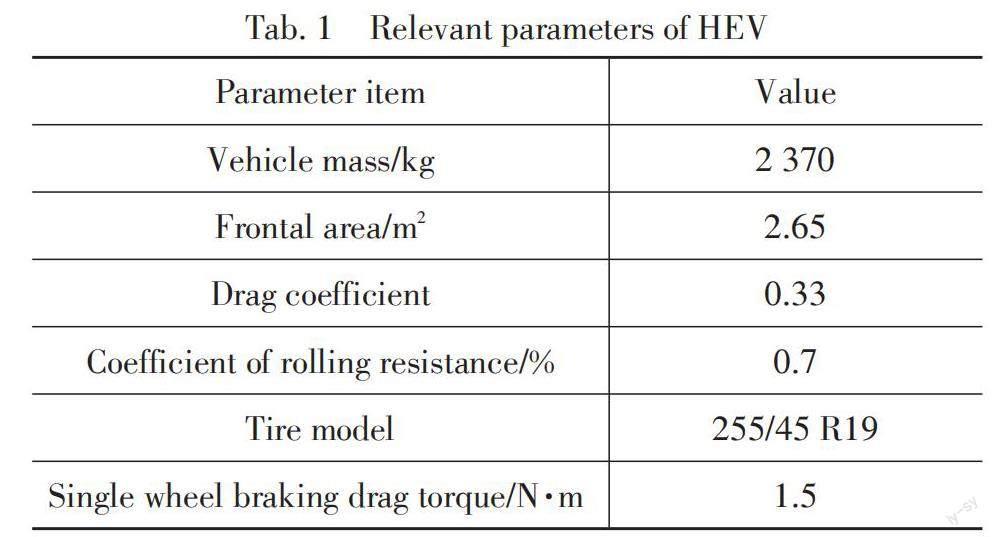
The simulation software is used to simulate the economy and dynamic performance of the vehicle. The established simulation model of the hybrid electric vehicle is shown in Fig.9. The relevant parameters of the hybrid electric vehicle are shown in Tab. 1, and the parameters of each component are shown in Tab. 2.
According to the parameters of the hybrid electric vehicle and various components of the powertrain system, the models are built in the AVL CRUISE software environment. The economy simulation calculation of the hybrid electric vehicle is carried out in WLTC and NEDC Standards test cycles.
NEDC test cycle is composed of 4 urban cycles and one suburban cycle [17]. The test distance is 11.022 km and the test time is 180 s. The urban cycle is used to simulate the traditional urban road conditions. Each urban cycle includes acceleration, deceleration, uniform speed and idle speed. The duration of the 4 urban cycle conditions is 780 s and the driving distance is 4.067 km. The suburban cycle is used to simulate the suburban road conditions. The duration is 400 s, the driving distance is 6.956 km, and the maximum speed is 120 km/h (Fig.10).
WLTC[18] test cycle is composed of 4 parts, including low speed, medium speed, high speed and super high speed working condition. Compared with NEDC test cycle, the speed of WLTC test cycle is much more fluctuate. WLTC test cycle has no special regularity, which belongs to the category of transient working condition. The speed covers a wider range. The maximum speed of WLTC is 10 km/h, higher than that of NEDC, and the test period of WLTC is longer than that of NEDC. The test time of WLTC is 10 min longer than that of NEDC, and the cycle distance of WLTC is 12 km further than that of NEDC (Fig.11).
Through the functional analysis of different modes for the hybrid electric vehicle and the development of simulation models, the corresponding functions can be realized. Based on the simulation models, the operation conditions of power sources under different working conditions can be obtained.
The simulation results of motor output speed of the hybrid electric vehicle in WLTC test cycle are shown in Fig.12. The simulation results of motor output torque and power of the hybrid electric vehicle in WLTC test cycle are shown in Fig.13 and Fig.14. The established models can be used to simulate the fuel consumption in different test cycles such as NEDC test cycle and WLTC test cycle. The operating points of the motor and engine can be obtained in different test cycle, and then the optimization simulation of the control strategy can be carried out. The simulation result of hybrid electric vehicle under wide open throttle acceleration is shown in Fig.15. In the condition of wide open throttle acceleration, the engine and motor are driven together to achieve the best dynamic performance of the hybrid electric vehicle.
The established models can be used to simulate different vehicle driving operation modes, and the powertrain system functions and modes can be operated according to the established control strategies, including pure electric drive mode, engine drive mode, combined drive mode and braking energy recovery mode. Simulation is carried out based on AVL CRUISE software, the simulation results of dynamic performance of the hybrid electric vehicle are shown in Tab.3. In conclusion, the established simulation models can realize the simulation of the dynamic and economy performance of the hybrid electric vehicle.
5 Conclusions
This paper elaborates the powertrain architecture, analyzes the system functions, driving operation modes and control strategies of the hybrid electric vehicle. The whole vehicle and powertrain system models are built in AVL Cruise software, and the components are electrically, mechanically and signal connected according to the control strategies. Verified by vehicle development, the simulation models are established effectively and correctly.
Based on the built models, the system energy consumption simulation is carried out in NEDC test cycle and WLTC test cycle, and the simulation of wide open throttle acceleration is also carried out. The values of 3 major indexes of dynamic performance (acceleration, maximum speed and maximum climbing gradient) and economic index (fuel consumption) are calculated. These calculations and studies can provide references for the pre-development of hybrid electric vehicles.
Further test bench and field tests, as well as fine tuning calibration with production purpose prototype HEVs and special engine for HEV are under planning in future.
References
[1] ZHANG T Q, WU Q L. Analysis and Design Perspective of Operation Modes for Hybrid Electric Vehicle [J].Automotive Digest(Chinese), 2019(9): 27-30.
[2] WU Q L. Research on Power Management and Diagnosis Strategies of Hybrid Electric Vehicle [J]. Automotive Digest (Chinese), 2019(7): 38-41.
[3] WU Q L. Function Analysis of Remote Control Drive for New Energy Vehicle [J]. Automotive Digest (Chinese), 2020(1): 24-27.
[4] CHINA SAE. TECHNOLOGY ROADMAP FOR ENERGY SAVING AND NEW ENERGY VEHICLES 2.0[M]. Beijing: CHINA MACHINE PRESS, 2020.
[5] SINGH K V, BANSAL H O, SINGH D.A Comprehensive Review on Hybrid Electric Vehicles: Architectures and Components[J]. Journals of Modern Transportation, 2019, 27(2): 77-107.
[6] Regulations on Parallel Administration of Average Fuel Consumption and New Energy Vehicle Credits for Passenger Vehicle Enterprises[EB/OL]. (2020-06-15)[2023-05-16]. https://www.gov.cn/zhengce/zhengceku/2020-06/22/content_5521144.htm.
[7] ANSELMA, P G, BELINGARDI G. Next Generation HEV Powertrain Design Tools: Roadmap and Challenges[J]. SAE Technical Paper, 2019: 2019-01-2602.
[8] ZHANG H, BLESINGER G, TOEDTER O, et al.Dualhybrid - Proof of a Concept for an HEV with Two Combustion Engines[J]. SAE Technical Paper, 2020: 2020-01-1019.
[9] ZHAO B, LV C, HOFMAN T. Driving-Cycle-Aware Energy Management of Hybrid Electric Vehicles Using a Three-Dimensional Markov Chain Model[J]. Automotive Innovation, 2019, 2(2): 146-156.
[10] WU Q L, ZHANG T Q, YANG F. Function Analysis and Design Research on Engine Start-Stop for 48V Hybrid Vehicle[J]. Automotive Digest(Chinese), 2021(2): 34-40.
[11] ZHANG T Q, WU Q L. Function Analysis and Simulative Research on 48 V Mild Hybrid System [J]. Automotive Digest (Chinese), 2020(6): 30-34.
[12] MONTAZERI-GH M, MAHMOODI-K M. Optimized predictive energy management of plug-in hybrid electric vehicle based on traffic condition-ScienceDirect[J]. Journal of Cleaner Production, 2016, 139: 935-948.
[13] WU Q L, YANG F. Vehicle power-on control method, device, vehicle and storage medium:CN110341624B [P]. 2020-08-14.
[14] WU Q L, ZHANG T Q, YANG F, et al. Vehicle energy management method, device and system, vehicle and storage medium: CN112060974A [P]. 2020-12-11.
[15] WU Q L. Method for calculating driver torque demand of light hybrid power system, storage medium and vehicle: CN110606073B [P]. 2021-02-09.
[16] WU Q, YANG F. Research on Information Display of Hybrid Electric Vehicle Power System [J]. Automotive Digest(Chinese), 2019(5): 54-57.
[17] Technical Committee of National Automobile Standardization (SAC/TC 114). Electric vehicles—Energy consumption and range—Test Procedures: GB/T 18386—2017[S]. Beijing: STANDARDS PRESS OF CHINA, 2017.
[18] Technical committee of National Automobile Standardization (SAC/TC 114). Measurement methods of fuel consumption for light-duty vehicles:GB 19578—2020[S]. Beijing: STANDARDS PRESS OF CHINA, 2020.
(責任编辑 明慧)
猜你喜欢
学会(2017年1期)2017-03-08
科技传播(2016年21期)2017-03-01
汽车工程学报(2016年5期)2017-01-16
汽车工程学报(2016年6期)2017-01-11
科技资讯(2016年19期)2016-11-15
戏剧之家(2016年20期)2016-11-09
科技视界(2016年4期)2016-02-22
现代电子技术(2015年22期)2015-12-02
科技与创新(2015年19期)2015-10-14