无信号交叉口自动驾驶汽车协同驾驶策略研究
2024-04-07 13:58董玮李岩郭宏伟渠谨黛董良
交通科技与管理 2024年4期
董玮 李岩 郭宏伟 渠谨黛 董良

摘要 自动驾驶汽车(AV)的发展和应用成为智慧城市的重要动力来源,交叉口作为城市路网通行能力瓶颈点,对其进行合理的管控是提高城市交通效率的重要途径和手段。文章提出了一种无信号交叉口自动驾驶汽车分布式协同驾驶策略并基于微观交通仿真软件SUMO和Python语言搭建联合仿真平台,实现对交叉口区域AV协同驾驶策略的生成以及车辆的优化控制。仿真结果表明,文章提出的协同驾驶策略在提高车辆安全性、乘客舒适性的同时降低了交叉口车辆总延误,更好满足了城市智慧出行、绿色出行的要求。
关键词 无信號交叉口;自动驾驶汽车;协同驾驶策略
中图分类号 TP183文献标识码 A文章编号 2096-8949(2024)04-0008-04
0 引言
自动驾驶汽车(AV)被认为是新一代交通系统中的关键组成部分,基于AV的交通管控是提高交通安全和交通效率的一种有效方式[1]。在V2X通信技术的帮助下,AV可以与邻近的车辆和路侧基础设施共享它们的驾驶信息,更好地协调整体的运动[2]。作为交通管控中的关键一环,交叉口管理将由传统的信号灯控制向自主式交叉口管理(Autonomous Intersection Manage-ment,AIM)转变。如何制定驾驶策略,使得车流能够快速、安全地通过自主式交叉口,成为当下研究的热点和难点。
从固定信号配时到自适应信号配时,从单点信号控制到区域信号协同控制,信号交叉口管理水平有了很大的提高。交叉口智能信号控制能够有效疏导交通流,提高道路通行能力,减少车辆延误和停车次数。随着智能网联技术的逐渐发展,传统的信号控制将不再是最优控制方案。车辆之间、车辆与路侧设备之间进行实时信息传递,控制中心通过计算得出各方向驶入车辆的最优通行方案,将无信号交叉口通行权及车辆占用交叉口时间等信息发送给车辆并进行实时管控,合理的协同驾驶策略将有效缓解交通拥堵,提高交通服务水平。
研究人员发现,交叉口协同驾驶技术的关键之一是确定冲突区域的车辆通行权[3],合理分配关键冲突区域的车辆通行权会产生可行的车辆通行顺序,在现有的研究中有两种主要的协同驾驶策略:基于预订的策略[4]和基于规划的策略[5],用于确定车辆通行顺序。然而,基于预订的策略得出的车辆通行顺序大致遵循先到先服务规则,在多数情况下表现不够良好;基于规划的策略随车辆数的增加,平均计算时间呈指数级增长[6],给实际应用带来了困难。
因此,该文提出了一种无信号交叉口自动驾驶汽车分布式协同驾驶策略,结合蒙特卡洛树搜索(MCTS)和启发式规则算法在短时间内找到当前最优通行顺序。该文的组织结构如下:第1节概述无信号交叉口AV协同驾驶策略理论基础;第2节介绍无信号交叉口场景构建;第3节提出基于MCTS的AV分布式协同驾驶策略;第4节搭建交叉口仿真环境并进行仿真结果分析;第5节进行总结展望。
1 无信号交叉口协同驾驶理论基础
自主式交叉口管理旨在创建一个可扩展、安全和高效的多智能体框架,用于管理交叉口的自动驾驶汽车,实现无信号灯控制下自主式车辆导航,使AV在交叉口协同通行变得更安全、更高效、更舒适、更环保。AIM的顺利实现需要高可靠性、低时延的V2X通信系统的支持,同时也依赖于快速发展且日趋成熟的智能网联管控技术。
在AIM系统中,AV是完全自主的,每辆车都可以利用低延迟和高可靠性的智能网联技术实现车辆的实时数据交互,车辆可以采取单车智能,或者依据交叉口控制器(可以是云平台、路侧设备或AV自身)的指令协同运行。
现有的AIM方式从管控模式的角度主要分为集中式和分布式两大类。集中式AIM使用位于路侧设备的单个控制器来计算交叉口过往车辆的最优通行轨迹。每辆车与控制器进行通信,传输其当前行驶状态及预期行驶轨迹。所有优化计算均由控制器执行,控制器将计算出的无冲突轨迹实时传回给车辆,车辆按控制命令进行相应的轨迹调整。在分布式自主交叉口管理中,不需要路侧设备(中央控制器),取而代之的是,所有的计算都在车辆穿越交叉口的过程中完成。
该文将树的相关理论引入无信号交叉口AV通行权最优分配问题中。无信号交叉口协同驾驶问题可以看作一棵树搜索问题,每个叶结点对应一个完整的车辆通行顺序,除叶结点外的其余树结点则对应一个特殊的部分车辆通行顺序。通过构建调度树可以生成全部的车辆通行顺序,无信号交叉口AV通行权最优分配问题等价于遍历出调度树上对应最小车辆总延误的叶结点,即可获得最优车辆通行顺序。
2 无信号交叉口场景构建
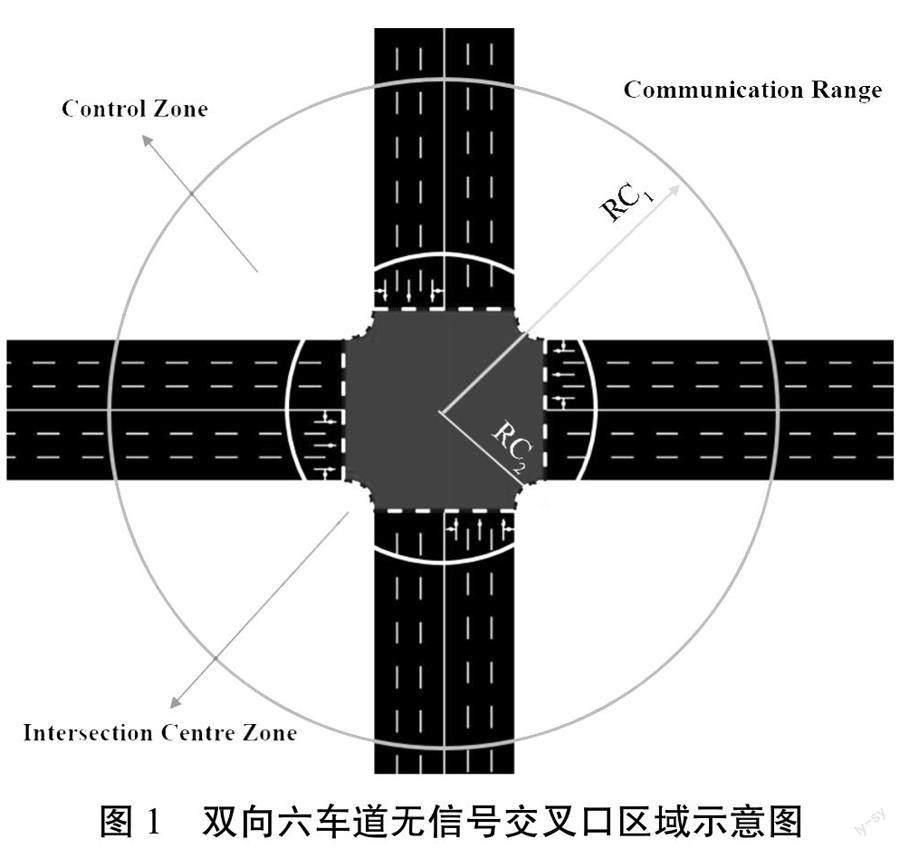
该文提出一个自主式管控交叉口模型,如图1所示。无信号交叉口区域由交叉口中心区域(ICZ)和控制区域(CZ)组成。ICZ为半径为RC2的圆形区域,CZ在ICZ以外,且半径为RC1的通信区域(CR)内。
车辆进入交叉口控制区域后,不再允许换道行为的发生,车辆进入交叉口中心区域后,驾驶行为被锁定,不再进行轨迹调整。为了简化模型,该文的基本假设如下:无信号交叉口区域为100% AV环境,且所有车辆的类型和性能一致;V2X是完美通信;所有入口车道上车辆是随机到达的,且服从参数为λ的泊松分布;忽略外部因素影响,即不考虑行人及非机动车辆在交叉口的行为。
协同驾驶流程:
第一步:AV驶入CZ,通过V2X实时传输自身各项驾驶数据;
第二步:每辆AV采用融合启发式规则的MCTS算法计算出一种交叉口车辆最优通行顺序;
第三步:全部的AV通过多数投票规则确定最终的最优车辆通行顺序;
第四步:根据上述最优通行顺序实时优化调整AV行驶轨迹,使CZ范围内AV协同驾驶效率最高;
第五步:AV安全、高效地通过无信号交叉口。
3 基于蒙特卡洛树搜索(MCTS)协同驾驶策略
3.1 目标问题
调度树理论为无信号交叉口带来了车辆最优通行顺序,但随着需要处理车辆数量的增加,枚举所有叶结点的难度急剧增加[6],通常不可能在有限的计算时间(预算)内遍历调度树的所有叶结点(一颗由n辆车构成的调度树有n个叶结点)。为了解决上述问题,该文使用MCTS来搜索有可能成为最优解(即最优通行顺序)的结点,MCTS在AlphaGo中的成功应用表明其是处理此类问题的有效解决方法[7]。该文将对传统MCTS算法进行改进,并实时追踪到目前为止表现最佳的车辆通行顺序,随着搜索树的扩展,该最优通行顺序不断地被表现更好的通行顺序所取代,当系统达到计算预算时,将返回目前更新的最佳车辆通行顺序作为基于MCTS算法求解的该无信号交叉口车辆最优通行顺序。
该文所设计的协同驾驶策略旨在通过合理分配无信号交叉口冲突区域车辆通行权以确定最优通行顺序——所有车辆进行最少的避撞减速调整,并实时调整优化车辆速度及加速度,使交叉口车辆通行总延误最小。
3.2 基于MCTS通行顺序建模
MCTS以迭代的方式逐步构建搜索树。一次迭代过程包括四个主要步骤,分别是选择、扩展、仿真和反向传播[8]。
该文提出了以启发式规则来帮助制定在仿真步骤中哪些节点(车辆)应该被扩展(添加到车辆通行顺序中)。启发式规则1有助于快速删除无效的通行顺序,启发式规则2确定候选车辆中适合添加进通行顺序中的车辆。
(1)对于同一车道上的车辆,禁止车辆变道,优先添加距离交叉口冲突区域最近的车辆。
(2)对于经过交叉口中心区域有碰撞冲突的两车辆,应优先添加预期到达冲突点时间更小的车辆。
4 无信号交叉口协同驾驶策略仿真验证
该文基于SUMO和Python搭建基础的仿真框架并进行可视化,实现对无信号交叉口区域AV协同驾驶策略的生成以及车辆的优化控制。
该文构建的双向六车道无信号交叉口各项参数如表1所示。
为了对无信号交叉口AV驾驶策略进行全面深入的对比,选定以下两种驾驶策略进行仿真分析:先到先服务(FCFS)策略、基于MCTS协同驾驶策略。
为进行全面对比分析,该文分别对先到先服务(FCFS)策略、基于MCTS的协同驾驶策略在无信号交叉口不同流量需求水平下进行仿真实验。实验是在图1所示的双向六车道无信号交叉口场景下进行的,每个方向有三条进入交叉口的车道。对于每个方向最左侧车道,有一半车辆左转,一半车辆直行;同样,对于每个方向最右侧车道,有一半车辆右转,而另一半车辆直行;中间车道上的所有车辆全部直行。车辆随机到达交叉口四个入口方向各车道上,车辆到达服从参数为λ的泊松分布,通过修改泊松分布的均值来改变一段时间内进入交叉口控制区域(CZ)的车辆数,从而验证所提出的协同驾驶策略在无信号交叉口低、中、高三种不同车流密度条件下(即不同流量需求水平下)的性能,所有车道上车辆的到达率相同。
对FCFS策略和基于MCTS协同驾驶策略分别进行低、中、高三种不同车流密度条件下100次仿真,获取车辆平均减速调整次数、车辆平均速度、车辆平均行程时间、车辆平均停车等待时间、车辆平均延误、车辆平均停车次数、车辆平均CO2排放量并记录仿真过程中TTC(车辆碰撞时间≤2 s)次数,相应的结果如表2所示。
由仿真结果分析可得:基于MCTS协同驾驶策略相较于FCFS策略在车辆平均减速调整次数、车辆平均速度、车辆平均行程时间、车辆平均等待时间、车辆平均延误、车辆平均停车次数、车辆平均CO2排放量及碰撞时间(TTC)次数等8项指标上均有所改善。在低车流密度条件下,FCFS策略与基于MCTS协同驾驶策略在各指标上表现水平相差不大,但随着无信号交叉口车流密度的增加,基于MCTS协同驾驶策略在各指标上的优势逐渐突显,尤其是在高车流密度条件下,基于MCTS协同驾驶策略在各指标上表现均明显优于FCFS策略。
同时,可以看出在较低的交通需求水平下,FCFS策略与基于MCTS协同驾驶策略指标相近,基于MCTS协同驾驶策略在各项指标上虽有所改善,但并没有展现出绝对的优势,反而相较于FCFS策略要花费过多的计算资源,造成一定程度的算力浪费。在该情况下,先到先服务往往是最优车辆通行策略,系统将省去复杂的计算过程,节省寻找全局最优车辆通行顺序所花费的时间。
然而,随着无信号交叉口交通需求水平的上升,基于MCTS协同驾驶策略能更好地规划车辆通行顺序,使车辆更加安全、高效、迅速地通过交叉口进而降低总体通行延误;此时,FCFS策略则略显乏力,高车流密度条件下车辆依据先到先服务通行会使大量车辆因避免冲突而进行频繁的启停,不仅造成时间上巨大的浪费,乘客乘坐体验感下降,而且会较大幅度增加尾气排放,加剧城市环境污染。
在城市中,由于交叉口中心区域(ICZ)利用率较低,拥堵现象频发,该文通过对ICZ利用率μ进行定义,以反映两种驾驶策略的通行能力。
式中,tc——AV占用ICZ的时长;Tc——ICZ开放总时长。
通过仿真得出了在不同交通需求条件下的ICZ利用率,如表3所示。
μ越大,代表ICZ通行的車辆越多,交叉口吞吐量越大。在FCFS策略中,由于AV共存状态较少,导致ICZ利用率较低;基于MCTS协同驾驶策略ICZ利用率较高,在高需求条件下,每一时刻有将近8辆车经过ICZ。相较于FCFS驾驶策略,基于MCTS协同驾驶策略的ICZ利用率在低、中、高密度条件下分别提升20.7%、46.8%、56.1%。
5 总结及展望
该文在100%自动驾驶汽车前提下,研究无信号交叉口车辆最优通行问题,提出智能网联环境下无信号交叉口协同驾驶策略。该文的研究工作具体包括以下几部分:
(1)简要介绍了近年来交叉口协同驾驶问题的相关研究背景。
(2)概述无信号交叉口协同驾驶策略的理论基础。
(3)构建网联环境下双向六车道无信号自主式管控交叉口场景。
(4)提出一种基于蒙特卡洛树搜索(MCTS)AV分布式协同驾驶策略。
(5)基于SUMO和Python语言搭建无信号交叉口仿真环境进行仿真分析。
该文提出了一种基于MCTS无信号交叉口分布式协同驾驶策略,因受时间、设备等因素制约,研究内容尚显肤浅,与实际应用还有一定的差距。该研究方向还有很大的优化和提升空间,归纳起来有以下几点:
(1)该文中的车辆均为AV,未来很长一段时间内都将处于AV与HDV混行阶段,应该对不同AV渗透率下无信号交叉口协同驾驶策略进行更加深入的研究。
(2)在AV与HDV共享交叉口道路通行权的混合交通流情况下,AV的运动应该考虑人类驾驶员的随机和不确定性行为。
(3)该文忽略V2X信息交互的传输延迟,根据目前V2X技术实际发展及应用水平,需要考虑信息交互延迟带来的影响。
(4)该文研究重点是单点无信号交叉口协同驾驶策略,在后续的研究中,可以考虑多交叉口协同规划,实现路网全局最优控制。
参考文献
[1]严新平, 褚端峰, 刘佳仑, 等. 智能交通发展的现状、挑战与展望[J]. 交通运输研究, 2021(6): 2-10+22.
[2]张毅, 姚丹亚, 李力, 等. 智能车路协同系统关键技术与应用[J]. 交通运输系统工程与信息, 2021(5): 40-51.
[3]Li L, Wang F Y. Cooperative Driving at Blind Crossings Using Inter vehicle Communication[J]. IEEE Transactions on Vehicular Technology, 2006(6): 1712-1724.
[4]Dresner K M, Stone P. A Multiagent Approach to Autonomous Intersection Management[J]. Articial Intelligence Research, 2008(3): 591-656.
[5]Meng Y, Li L, Wang F Y, et al. Analysis of Cooperative Driving Strategies for Nonsignalized Intersections[J]. IEEE Transactions on Vehicular Technology, 2017(4): 2900-2911.
[6]Morrison D R, Jacobson S H, Sauppe J J, et al. Branch-and-bound algorithms: A survey of recent advances in searching, branching, and pruning[J]. Discrete Optimization, 2016(19): 79-102.
[7]Silver D, Schrittwieser J, Simonyan K, et al. Mastering the game of Go without human knowledge[J]. Nature, 2017(7676): 354-359.
[8]CB Browne, Powley E, Whitehouse D, et al. A Survey of Monte Carlo Tree Search Methods[J]. IEEE Transactions on Computational Intelligence & Ai in Games, 2012(1): 1-43.
收稿日期:2023-11-15
作者簡介:董玮(1981—),男,硕士研究生,正高级工程师,研究方向:机械制造工艺。