基于混合卡尔曼粒子滤波的电动汽车锂电池荷电状态估计
2024-04-23 04:36张子超邹必昌
汽车工程师 2024年3期
张子超 邹必昌

【摘要】针对动力电池荷电状态(SOC)估计中,传统扩展卡尔曼滤波(EKF)忽略高阶项、粒子滤波(PF)存在重采样过程中的粒子退化与多样性丧失的问题,提出了改进的混合卡尔曼粒子滤波(MKPF)算法。首先采用扩展卡尔曼滤波产生系统的状态估计,然后使用无迹卡尔曼滤波器重复这一过程,将扩展卡尔曼滤波和无迹卡尔曼滤波获得的状态估计共同作为粒子滤波建议分布,并通过权值排序进行粒子优胜劣汰。仿真和试验结果表明,所提出算法的SOC估算最大误差为1.2%,优于PF、EKF、UKF算法的SOC估算精度。
关键词:锂电池 荷电状态 粒子滤波 混合卡尔曼粒子滤波
中图分类号:U469.72 文献标志码:A DOI: 10.20104/j.cnki.1674-6546.20230386
State-of-Charge Estimation of Electric Vehicle Lithium Battery Based on Mixed Kalman Particle Filter
Zhang Zichao, Zou Bichang
(Research Center for Smart Grid Control Technology, Yangtze University, Jingzhou 434023)
【Abstract】In the state-of-charge estimation of power battery, the traditional Extended Kalman Filter (EKF) ignores high-order terms and Particle Filter (PF) suffers from particle degradation and loss of diversity during the resampling process. To address this issue, this paper proposed the improved Mixed Kalman Particle Filter (MKPF) algorithm. Firstly, the extended Kalman filter was used to generate the state estimate of the system, and then the unscented Kalman filter was used to repeat the process. The state estimates obtained by the extended Kalman filter and the unscented Kalman filter were used together as the particle filter proposal distribution, and value sorting was used to determine the survival of the fittest particles. Simulation and experimental results show that the maximum error of SOC estimate by the proposed algorithm is 1.2%, which is better than the estimation accuracy of the existing PF, EKF, and UKF algorithms on SOC.
Key words: Lithium battery, SOC, Particle Filter (PF), Mixed Kalman Particle Filter (MKPF)
【引用格式】張子超, 邹必昌. 基于混合卡尔曼粒子滤波的电动汽车锂电池荷电状态估计[J]. 汽车工程师, 2024(3): 28-34.
ZHANG Z C, ZOU B C. State-of-Charge Estimation of Electric Vehicle Lithium Battery Based on Mixed Kalman Particle Filter[J]. Automotive Engineer, 2024(3): 28-34.
1 前言
准确估算电动汽车动力电池的荷电状态(State Of Charge,SOC),避免过充或过放对电池剩余寿命及使用安全带来的影响,是电池管理系统(Battery Management System,BMS)的主要功能[1-3]。目前,常用的SOC估算方法有安时积分法、开路电压法、扩展卡尔曼滤波(Extended Kalman Filter,EKF)算法、无迹卡尔曼滤波(Unscented Kalman Filter,UKF)算法、粒子滤波(Particle Filter,PF)算法以及神经网络算法[4]。
安时积分法存在仪器误差累积问题,开路电压法不适合在动态SOC估计中使用,粒子滤波算法能很好地抑制波动性,与EKF和UKF结合后比原有的EKF、UKF更准确。文献[5]提出了一种扩展卡尔曼粒子滤波器(Extended Kalman Particle Filter,EKPF),有效抑制了发散及噪声的影响;文献[6]提出了无迹卡尔曼粒子滤波器(Unscented Particle Filter,UPF),有效提高了SOC的估算精度;文献[7]提出了一种迭代扩展卡尔曼滤波器(Iterated Extended Kalman Filter,IEKF),产生了更加符合真实状态的后验概率分布。然而,粒子滤波算法的精度仍存在提升空间,在此基础上,文献[8]提出了一种基于EKF和UKF的混合卡尔曼粒子滤波(Mixed Kalman Particle Filter,MKPF)算法,在非线性滤波方面远优于其他的粒子滤波算法。
基本粒子滤波算法普遍存在的问题是粒子退化现象。这意味着,经过若干次迭代后,大量计算资源会浪费在权值微不足道的粒子上。为减轻粒子退化,通常采用增加粒子数量、更改重采样方法以及选择合理的建议密度等方法。相比之下,MKPF算法的优势在于提供了一种更接近真实分布的建议密度分布函数。这意味着,在相同的粒子数量条件下,MKPF算法能保证滤波的最终质量。至今,MKPF算法尚未应用于SOC估计领域,本文采用权值排序优胜劣汰的粒子重采样方法改进MKPF算法进行锂电池SOC估计,通过试验验证估计效果。
2 改进的混合卡尔曼粒子滤波器设计
2.1 改进的MKPF算法
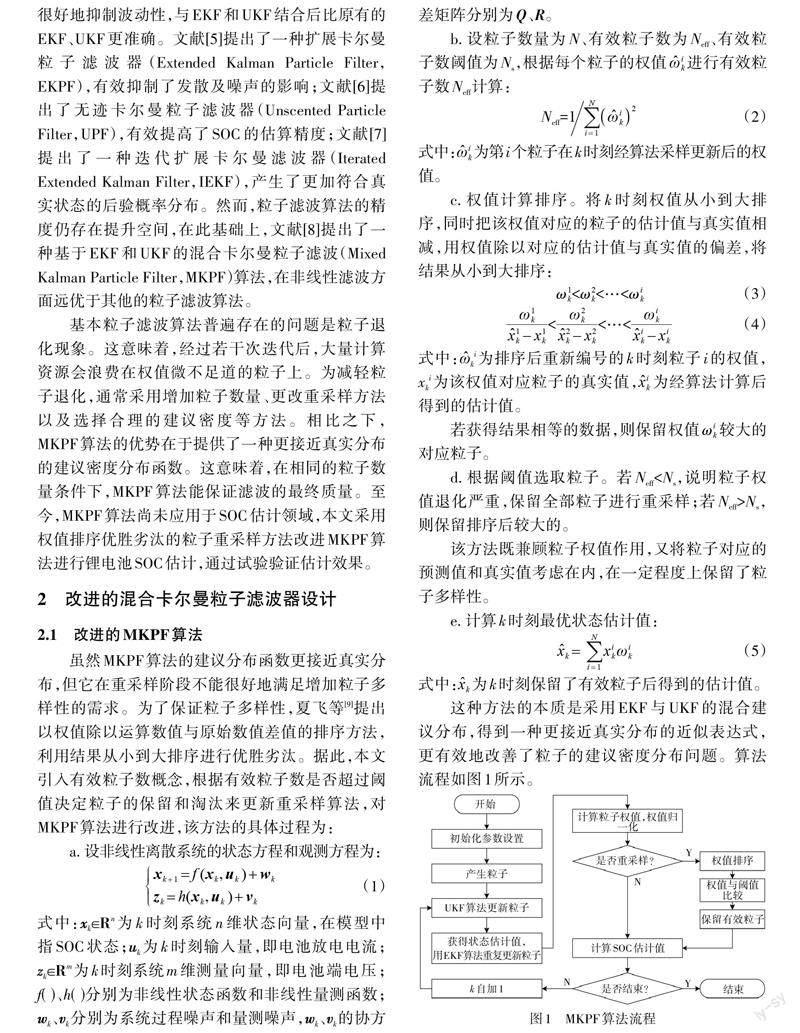
虽然MKPF算法的建议分布函数更接近真实分布,但它在重采样阶段不能很好地满足增加粒子多样性的需求。为了保证粒子多样性,夏飞等[9]提出以权值除以运算数值与原始数值差值的排序方法,利用结果从小到大排序进行优胜劣汰。据此,本文引入有效粒子数概念,根据有效粒子数是否超过阈值决定粒子的保留和淘汰来更新重采样算法,对MKPF算法进行改进,该方法的具体过程为:
a. 设非线性离散系统的状态方程和观测方程为:
式中:xk∈Rn為k时刻系统n维状态向量,在模型中指SOC状态;uk为k时刻输入量,即电池放电电流;zk∈Rm为k时刻系统m维测量向量,即电池端电压;f( )、h( )分别为非线性状态函数和非线性量测函数;wk、vk分别为系统过程噪声和量测噪声,wk、vk的协方差矩阵分别为Q、R。
b. 设粒子数量为N、有效粒子数为Neff、有效粒子数阈值为Ns,根据每个粒子的权值[ωik]进行有效粒子数Neff计算:
式中:[ωik]为第i个粒子在k时刻经算法采样更新后的权值。
c. 权值计算排序。将k时刻权值从小到大排序,同时把该权值对应的粒子的估计值与真实值相减,用权值除以对应的估计值与真实值的偏差,将结果从小到大排序:
式中:[ω]ki为排序后重新编号的k时刻粒子i的权值,xki为该权值对应粒子的真实值,[xik]为经算法计算后得到的估计值。
若获得结果相等的数据,则保留权值ω[ik]较大的对应粒子。
d. 根据阈值选取粒子。若Neff
该方法既兼顾粒子权值作用,又将粒子对应的预测值和真实值考虑在内,在一定程度上保留了粒子多样性。
e. 计算k时刻最优状态估计值:
式中:[xk]为k时刻保留了有效粒子后得到的估计值。
这种方法的本质是采用EKF与UKF的混合建议分布,得到一种更接近真实分布的近似表达式,更有效地改善了粒子的建议密度分布问题。算法流程如图1所示。
为了比较改进后的MKPF算法相对于原算法的提升效果,选用一维系统来仿真EKPF、UKF、PF、扩展粒子滤波(Extended Particle Filter,EPF)、UPF、MKPF以及改进后的MKPF,比较各算法在状态估计精度方面的综合指标。
假设非线性一维系统的状态空间模型为:
式中:wk为符合伽马分布的过程噪声,zk为k时刻的测量结果,vk为符合高斯分布的均值为0、方差为R的测量噪声。
设状态的初值x(0)=1,EKF和UKF的协方差P(0)=0.75,仿真时间为T=60 s。
仿真得到的状态如图2所示,从图2中可以看出,各种算法都比较好地跟随了系统的真实状态,与原有的MKPF算法相比,改进后的MKPF算法总体滤波水平近似,但由于引入了有效粒子,在尖峰处更加平滑,误差更小。
计算各种滤波算法估计得到的状态与真实状态间的欧氏距离,得到的状态偏差如图3所示,可以明显看出,改进后的MKPF算法误差一直处于较低水平,其他算法误差起伏较大。
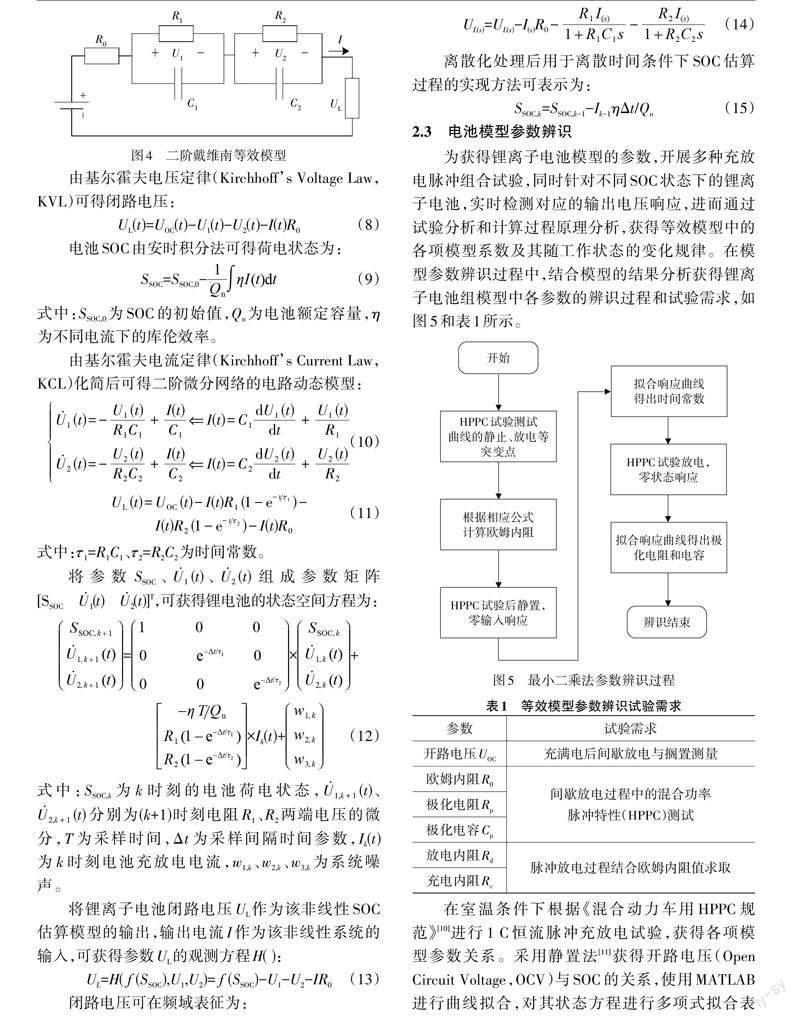
2.2 二阶戴维南等效电路模型
为了更为精确地反映电池的变化规律,提高SOC的估算精度,本文在理想等效模型基础上,增加2个RC并联回路组成二阶RC模型,获得的等效模型如图4所示。其中,UOC为开路电压,R0为欧姆内阻,R1为电池极化内阻,R2为电池的表面效应电阻,U1、U2分别为R1、R2两端的电压,C1、C2分别为极化电容、表面效应电容,I为电池的充放电电流,UL为外接负载时的闭路电压。
由基尔霍夫电压定律(Kirchhoffs Voltage Law,KVL)可得闭路电压:
2.3 电池模型参数辨识
为获得锂离子电池模型的参数,开展多种充放电脉冲组合试验,同时针对不同SOC状态下的锂离子电池,实时检测对应的输出电压响应,进而通过试验分析和计算过程原理分析,获得等效模型中的各项模型系数及其随工作状态的变化规律。在模型参数辨识过程中,结合模型的结果分析获得锂离子电池组模型中各参数的辨识过程和试验需求,如图5和表1所示。
在室温条件下根据《混合动力车用HPPC规范》[10]进行1 C恒流脉冲充放电试验,获得各项模型参数关系。采用静置法[11]获得开路电压(Open Circuit Voltage,OCV)与SOC的关系,使用MATLAB进行曲线拟合,对其状态方程进行多项式拟合表达。对比分析拟合结果,选用6阶拟合效果最好。获得的锂离子电池组的OCV与SOC的关系如图6所示。
式中:UOCV为开路电压。
以最小均方根误差(Root Mean Square Error,RMSE)为判断拟合效果的依据,采用偏最小二乘法思想进行拟合效果描述:和方差(Sum of Squares due to Error,SSE)为0.000 2,决定系数(R2)为0.999 4,RMSE为0.006 7。由上述拟合误差分析结果可知,该拟合的多项式可以实现对OCV-SOC的准确描述。
欧姆内阻R0及其余RC参数的获取需要对HPPC测试过程进行细化,结合一次脉冲充放电不同SOC处的电压、电流求取,图7所示为电池SOC为0.5时一次脉冲充放电的响应过程。本文采用文献[12]提出的最小二乘法辨识图7中的各项未知参数,并以曲线拟合的方式对其状态方程进行多项式表达,模型辨识参数如表2所示。3 MKPF建模与仿真
为了验证MKPF算法对锂电池SOC估算的准确性,设各算法SOC初值为0.9,粒子数N=80,有效粒子数阈值为0.6N,采样周期均为1 s,过程噪声矩阵Q=(10-10,10-10,10-10),观测噪声矩阵R=[0.01],初始协方差矩阵P=(10-2,10-2,10-2)T。分别在间歇放电工况及动态应力测试工况(Dynamic Stress Test,DST)下验证。
试验中使用三星INR 18650-25R电池,具体参数如表3所示。
由图8a可以看出,在电流和电压加入非高斯噪声的条件下,各算法都可以正确收敛且精度较高。由图8b可以看出,EKF算法因初始值引起的剧烈变化,均存在明显的初始误差,由于改进的MKPF算法对重采样过程进行了优化,能在更短时间内快速逼近参考值。EKF、UKF、PF算法的平均误差分别为3.4%、4.3%、2.5%;MKPF算法的RMSE为0.003 5,平均误差为0.9%。可以看出,MKPF平均误差优于其余算法。
3.2 DST放电试验
DST工况试验由美国先进电池协会提出,作为模拟电动汽车最常用的试验之一,它能够很好地反映电池在复杂道路条件下的表现。DST放电电流、电压如图9、图10所示。
由图11a可以看出,在DST工况下,UKF、PF、MKPF算法与工况试验的SOC曲线基本一致,在经历初期扰动后能快速收敛至真实值附近,EKF算法未能正确收敛。整体来看,优化后的算法能有效估计实时SOC,相较于其他算法更接近真实值,误差较为稳定。由图11b可以看出,EKF算法由于忽略高阶项导致误差逐步积累,后期SOC估计误差偏大,而MKPF算法始终保证SOC估计准确,误差基本稳定。忽略前期扰动,DST下MKPF算法SOC估算最大誤差为0.014 4,平均绝对误差为0.001 7,抗干扰能力显著,进一步提高了电池SOC的估算精度。
4 结束语
本文研究了MKPF算法在电动汽车SOC估计上的应用,通过建立二阶RC等效电路模型,利用HPPC试验完成电池参数辨识,为了更准确地估算SOC,本文基于MKPF算法针对重采样策略进行优化,同时选择了更加适合的建议密度,改善了粒子退化现象,进一步提高了SOC的估算精度。为了验证算法的有效性及在复杂条件下的适应性,在间歇放电工况、UDDS工况和DST工况下进行测试,试验结果表明,建立的电池模型具有较高精度,改进的MKPF算法误差在1.2%以内。
混合卡尔曼粒子滤波算法在结合EPF和UPF的基础上,虽然计算时间有所延长,但是在复杂工况下,其估算精度明显高于其他两种算法,具有较强的鲁棒性和稳定性。本文试验未考虑不同温度对SOC的影响,在实际电动汽车动力电池工作中,电池温度变化范围较大,这是后续研究需考虑的因素。
参考文献
[1] 王义军, 左雪. 锂离子电池荷电状态估算方法及其应用场景综述[J]. 电力系统自动化, 2022, 46(14): 193-207.
WANG Y J, ZUO X. Review on Estimation Methods for State of Charge of Lithium-Ion Battery and Their Application Scenarios[J]. Automation of Electric Power Systems, 2022, 46(14): 193-207.
[2] 胡韵华, 冯瑾涛, 邓清闯, 等. 电动汽车直流充电桩自动化测试平台的设计与应用[J]. 电力系统保护与控制, 2021, 49(7): 150-159.
HU Y H, FENG J T, DENG Q C, et al. Development and Application of Automated Test Platform for DC Charging Piles of Electric Vehicles[J]. Power System Protection and Control, 2021, 49(7): 150-159.
[3] 任怡睿, 林济铿, 宁剑, 等. 一种基于占优度和Choquet积分的电力系统故障诊断方法综合评估策略[J]. 电力系统保护与控制, 2021, 49(6): 145-154.
REN Y R, LIN J K, NING J,l et al. A Comprehensive Evaluation Strategy of a Power System Fault Diagnosis Method Based on Dominance and the Choquet Integral[J]. Power System Protection and Control, 2021, 49(6): 145-154.
[4] 刘鹏, 李云伍, 梁新成. 基于遗忘递推最小二乘与自适应无迹卡尔曼滤波的锂电池SOC估计[J]. 汽车技术, 2022(2): 21-27.
LIU P, LI Y W, LIANG X C. Estimation of Lithium Battery SOC Based on FFRLS and AUKF[J]. Automobile Technology, 2022(2): 21-27.
[5] 趙又群, 周晓凤, 刘英杰. 基于扩展卡尔曼粒子滤波算法的锂电池SOC估计[J]. 中国机械工程, 2015, 26(3): 394-397.
ZHAO Y Q, ZHOU X F, LIU Y J. SOC Estimation for Li-Ion Battery Based on Extended Kalman Particle Filter[J]. China Mechanical Engineering, 2015, 26(3): 394-397.
[6] DOUCET A, DE FREITAS N, WAN E A. The Unscented Particle Filter[J]. Advances in Neural Information Processing Systems, 2001, 13: 584-590.
[7] 李良群, 姬红兵, 罗军辉. 迭代扩展卡尔曼粒子滤波器[J]. 西安电子科技大学学报(自然科学版), 2007, 34(2): 233-238.
LI L Q, JI H B, LUO J H. Iterated Extended Kalman Particle Filtering[J]. Journal of Xidian University, 2007, 34(2): 233-238.
[8] 王法胜, 赵清杰. 一种用于解决非线性滤波问题的新型粒子滤波算法[J]. 计算机学报, 2008, 31(2): 346-352.
WANG F S, ZHAO Q J. A New Particle Filter for Nonlinear Filtering Problems[J]. Chinese Journal of Computers, 2008, 31(2): 346-352.
[9] 夏飞, 王志成, 郝硕涛, 等.基于卡尔曼粒子滤波算法的锂电池SOC估计[J]. 系统仿真学报, 2020, 32(1): 44-53.
XIA F, WANG Z C, HAO S T, et al. State of Charge Estimation of the Lithium-Ion Battery Based on Improved Extended Kalman Particle Filter Algorithm[J]. Journal of System Simulation, 2020, 32(1): 44-53.
[10] 明彤彤, 赵晶, 王晓磊, 等. 基于改进LSTM的脉冲大倍率工况下锂电池SOC估计[J]. 电力系统保护与控制, 2021, 49(8): 144-150.
MING T T, ZHAO J, WANG X L, et al. SOC Estimation of a Lithium Battery under High Pulse Rate Condition Based on Improved LSTM[J]. Power System Protection and Control, 2021, 49(8): 144-150.
[11] REN Z, DU C Q, WU Z Y, et al. A Comparative Study of the Influence of Different Open Circuit Voltage Tests on Model-Based State of Charge Estimation for Lithium-Ion Batteries[J]. International Journal of Energy Research, 2021, 45(9): 13692-13711.
[12] LI L, WANG C Y, YAN S X, et al. A Combination State of Charge Estimation Method for Ternary Polymer Lithium Battery Considering Temperature Influence[J]. Journal of Power Sources, 2020, 484.
(责任编辑 斛 畔)
修改稿收到日期为2023年12月10日。
猜你喜欢
计算机应用(2016年12期)2017-01-13
航空兵器(2016年5期)2016-12-10
电脑知识与技术(2016年1期)2016-03-22
科技与创新(2016年3期)2016-03-15
电源技术(2016年2期)2016-02-27
百科探秘·航空航天(2015年3期)2015-12-01
电源技术(2015年7期)2015-08-22
现代电子技术(2014年22期)2014-11-14
计算技术与自动化(2014年3期)2014-10-28
电子设计工程(2014年18期)2014-02-27