
基于单光子探测器恢复时间的误码率分析
2023-01-29 08:54李晓亮刘荣科王建军刘向南
遥测遥控 2023年1期
李晓亮,刘荣科,王 岩,王建军,刘向南
(1 北京航空航天大学电子信息工程学院 北京 100191;2 北京遥测技术研究所 北京 100094;3 中国人民解放军63618部队 库尔勒 841000)
引言
单光子探测器凭借极高的探测灵敏度,在量子计数、量子通信、激光测距、激光雷达、天文观测、激光通信、生物光子学和医学光子学等领域有着广泛的应用[1−6]。随着人类对宇宙的探索,深空探测的距离越来越远,科学探测的内容也越来越多,对数据回传的速率要求也越来越高,现有的微波通信已难以满足深空通信要求,而激光通信在深空探测中的应用变得日益迫切。在深空激光通信中,采用单光子探测器和脉冲位置调制是提高通信灵敏度和通信速率的两项关键技术。
单光子探测器的恢复时间(死时间)是决定激光通信速率的关键指标。单元探测器的恢复时间用计数率的倒数来衡量。对于常用的超导纳米线单光子探测器(Superconducting Nanowire Single Photon Detector,SNSPD),当处于低温超导状态的纳米线接收到光子后,会形成“热岛”破坏了超导态进入电阻态,超导材料的热弛豫时间很短(~10 ps),在探测器两端将产生一个快速电脉冲[7]。但由于电路中动态电感的存在,电信号消失比较慢,一般在几纳秒到几十纳秒,因此超导纳米线单光子探测器的计数率一般在100 MHz 以下。SNSPD 常采用减小超导纳米线长度(接收面积)和多元拼接的方法来降低探测器的恢复时间。对于另一种常用的单光子探测器—盖革模式的雪崩光电二极管(Avalanche Photo Diode,APD),后脉冲是影响计数率的关键因素。后脉冲是雪崩光电二极管接收到光子产生雪崩效应,一部分雪崩电子被类似缺陷能级俘获,在随后一段时间内释放出来,引起新的雪崩现象而产生的脉冲信号。此时无法区分脉冲信号是由于新光子到来形成的,还是后脉冲产生的,从而导致计数错误。APD 常采用门控方法和淬灭方法来降低死时间[8,9]。
为提高激光通信速率,在尽量降低探测器恢复时间(死时间)的同时,通常采用光学分集接收和多元单光子探测器探测方式。例如,美国月球大气与粉尘环境探测器项目中的月球激光通信演示(Lunar Laser Communications Demon-stration,LLCD)系统[10],采用四个400 mm望远镜分集接收技术,并且每个望远镜采用一个四单元超导纳米线单光子探测器,实现了月地下行链路622 Mbps 的高速通信速率。
误码率是衡量激光通信质量好坏的一个关键指标,它与探测器恢复时间、通信速率等参数密切相关。南京大学闫夏超等基于接收到的光子服从泊松分布模型,分析了采用超导纳米线单光子探测器的深空激光通信的误码率[11],但没有考虑探测器恢复时间的影响;重庆邮电大学邓晨辉等建立了单光子探测器阵列接收机的误码率模型并进行了仿真,给出了恢复时间影响多个时隙情况下的光子探测阵列接收PPM 系统的误码性能[12],但没有对恢复时间超过一个符号时隙长度的情况进行分析。
本文将从单光子探测器的恢复时间特性出发,推导出探测器单元探测概率和虚警概率。建立基于信号“或”硬判决和基于最大计数值硬判决的多元单光子探测器阵列误码率模型,并给出理论仿真结果,可为后续的工程设计提供技术参考。
1 探测概率与虚警概率
1.1 单光子探测器单元的探测概率
探测概率是发送信号为“1”时(简称信号时隙),正确检测出来的概率。当单光子探测器的恢复时间大于时隙宽度时,恢复时间内的某个时隙发送信号“1”,此时系统无法正确判断探测器输出的信号是当前信号时隙产生的,还是前一个信号时隙产生的。因此探测器单元的探测概率为

式中,p1work为该探测器可以正常工作的概率,即在光子达到前的恢复时间内未探测到光子的概率;p(1|1)为探测器在正常情况下的探测率,与探测器的暗计数噪声、到达探测器单元的平均信号光子数和平均背景光子数有关。

式中,ns为一个信号时隙内到达单元探测器上平均信号光子数;nb为一个单元探测器在一个时隙内的平均背景光子数;nc为一个单元探测器在一个时隙内的暗计数;μ为探测器的量子效率。当前发送信号为“1”,探测器可正常工作的概率为

其中,p′(0|0)为发送信号“1”到达之前的恢复时间长度内未探测到背景光子的概率,p′(0|0)=exp[-(μ∙nb+nc)d];p′(0|1)为发送信号“1”到 达之前的恢复时间长度内未探测到信号光子数的概率。在恢复时间内出现信号时隙的个数(称为信号时隙数)与PPM 的阶数M、恢复时间所占时隙数有关。

式中,d为恢复时间所占时隙数目;M为PPM 的阶数(即每个符号所占时隙数目);k为d/M的整数部分,r为d/M的余数部分。
当前信号时隙出现的位置i不同,则信号时隙数也不同。当1≤i≤r-1 时,如图1 中的第①种情况,如果第k+1 个符号内信号时隙出现在r-i区间,则信号时隙数为k+1,按照传输信息符号等概率分布考虑,则此时概率为(r-i)/M;如果第k+1 个符号内信号时隙未出现在r-i区间,则信号时隙数为k,此时概率为(M-r+i)/M。同理,当r≤i≤M时,如图1 中的第②种情况,如果第k个符号内信号时隙出现在(M+r-i)区间,则信号时隙数为k,此时概率为(M+r-i)/M;如果第k个符号内信号时隙未出现在(M+r-i)区间,则信号时隙数为k-1,此时概率为(i-r)/M。因此,信号时隙数有k-1、k、k+1 这三种可能,出现的概率与当前信号时隙位置关系如表1所示。

图1 恢复时间与时隙位置示意图Fig.1 Recovery time and slot position

表1 发送信号“1”时不同信号时隙数的概率Table 1 Probability of signal slot within sending signal “1”
因此,信号时隙前的恢复时间长度内未探测到信号光子数的概率为


单光子探测器的探测概率为

1.2 单光子探测器单元的虚警概率
虚警概率是当发送端发送信号为“0”(简称非信号时隙),探测器误输出脉冲信号的概率为

式中,p(1|0)为探测器在非信号时隙探测到光子的概率,表示为

p0work为在光子达到前的恢复时间长度内未探测到光子的概率,即这段时间内既没有探测到信号光子和背景光子,也没有暗计数产生,其计算公式如下:

当d=k∙M+r时,则信号时隙数有k-1、k、k+1、k+2 这四种可能,出现的概率与当前信号时隙位置i有关,如表2所示。
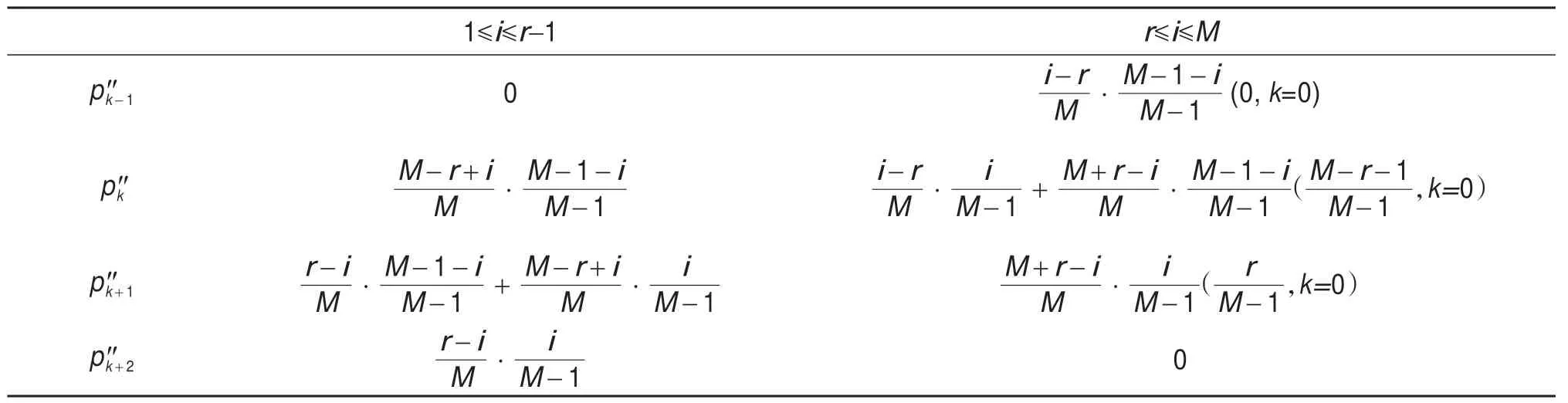
表2 发送信号为“0”时不同信号时隙数的概率Table 2 Probability of signal slot within sending signal “0”
同理可推导:

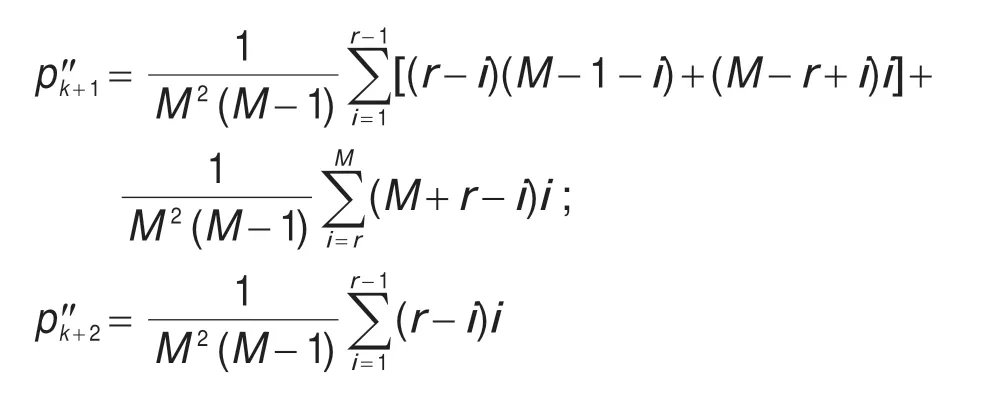
因此,单光子探测器的虚警概率为

2 误码率模型
2.1 单光子探测器阵列的误符号率
对于单光子探测器阵列接收机,信号的判决分为硬判决和软判决两种。硬判决在解调时根据接收机接收到的光子计数值直接判别信号时隙的位置,软判决在解调时只是根据接收机接收到的光子计数值,对信号时隙的位置进行概率统计,解码时根据统计的概率进行综合判断,给出信号时隙最可能出现的位置(最大似然估计)。由于软判决的计算相当复杂,一般采用硬判决。常见的硬判决有两种:一种是采用信号“或”的方式,当阵列接收机有一个探测器单元接收到信号,则认为该时隙为信号时隙。这种方式适用于信号光弱、背景光与暗计数相当低的情况;另一种是采用光子计数值最大的时隙作为信号时隙,这种方式可一定程度地减小背景光与暗计数的影响。
2.1.1 信号“或”方式硬判决的误符号率
采用信号“或”方式,在任何一个时隙内只要探测器阵列有一个探测器单元探测到信号,则认为该时隙有可能为信号时隙。美国的月地激光通信链路中LLCD 采用4 个望远镜分集接收方式,每个望远镜接收到光信号通过多模光纤耦合到4单元的超导纳米线单光子探测器阵列上,采用信号“或”的方式进行硬判决,从而实现下行链路的622 Mbps 的远距离高速通信。这种方式误符号的概率为

式(13)中等式右边第二项表示为正确检测到发射信号“1”的概率,信号时隙随机出现在1~M时隙内的任何位置i。当前面i-1个位置都未检测到信号,而第i个位置检测到信号则认为该位置为信号时隙位置(后面不再检测和考虑)。此时正确检测的概率为

式(13)中等式右边第三项表示为在信号时隙和无信号时隙都未检测到光子,从M个位置中随机选取一个位置作为信号时隙的正确概率。
2.1.2 最大计数值硬判决的误符号率
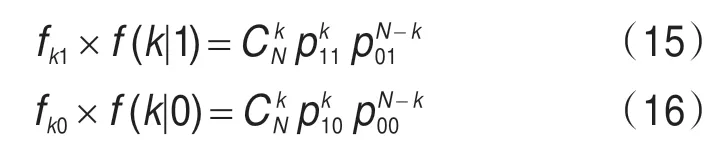
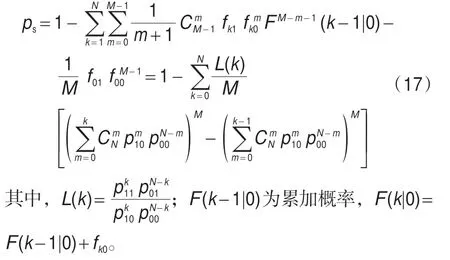
采用最大计数值进行硬判决时,假设探测器阵列的单元数为N,则单光子探测器阵列的最大计数值的取值范围为0~N。此时有三种情况能够正确探测到信号时隙位置:一是在信号时隙有k个单元探测到光子,非信号时隙探测到光子的单元数小于k;二是在信号时隙有k个单元探测到光子,同时有m个非信号时隙也有k个单元探测到光子,则此时正确判决的概率为1/(m+1)。当m=0 时,即为第一种情况。第三种情况是所有时隙均未探测到光子,此时正确判决的概率为1/M。接收机有k个单元接收到光子的概率分布函数为
因此采用最大计数值硬判决的误符号率为
2.2 单光子探测器阵列的误码率
检测出PPM 的符号后,每个符号通过编码的逆映射到log2M个比特的串上。假设所有误符号概率都相等,则误码率为

采用硬判决解码,进行符号判决后送到RS(n,k)解码器,可纠正多种形式的错误。当信道状态由符号擦除占主导时,RS 解码器的性能会得到改善,擦除RS 解码器不会产生未被发现的错误。当接收码字中擦除的数目为dmin=n-k+1 或更少时,此时码字都能被正确解码;当接收码字的擦除数目超过dmin时,解码器会发出警报并且无法正确解码。因此在擦除信道中,RS 编码后的误码字率为

采用RS编码解码时系统的误码率近似为

3 仿真分析
从上述理论分析可以得到如下结论:无论是编码前还是编码后,无论是采用信号“或”硬判决还是采用最大计数值硬判决,系统的误码率均与时隙内信号光子数、背景光子数、器件暗计数、通信速率、PPM 调制体制阶数、接收阵列探测器单元数和恢复时间等参数有关。下面进行仿真分析,并得到如图2~图10所示的仿真结果。

图2 未编码N=16时的误码率(信号“或”)Fig.2 BER with no coding in N=16(signal “or”)

图3 编码后N=16时的误码率(信号“或”)Fig.3 BER with coding in N=16(signal “or”)

图4 编码后N=4时的误码率(信号“或”)Fig.4 BER with coding in N=4(signal “or”)
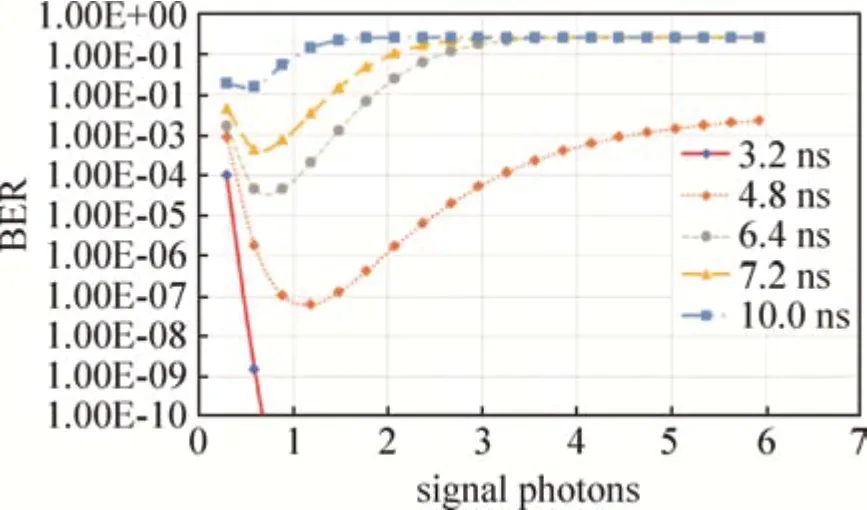
图5 编码后N=9时的误码率(信号“或”)Fig.5 BER with coding in N=9(signal “or”)
当采用信号“或”硬判决方式时,图2给出了编码前通信速率为1.22 Gbps、暗计数为100 cps、背景光子数为1 000 光子数/秒、16-PPM、接收阵列探测器单元数为16 时,未编码时误码率在不同恢复时间、不同信号光子情况下的关系示意图;若采用高效纠错的RS(15,8)编译码,则编码后的误码率如图3 所示。图4~图7 分别给出了接收阵列探测器单元数N=4、9、25、36,RS(15,8)编码后的误码率曲线。
从图3~图7的仿真结果可以看出:采用多元探测器可有效克服探测器恢复时间的影响,降低系统的通信误码率。为满足通信误码率优于10-7的要求,当接收机探测器单元数为4时,探测器恢复时间应≤3.2 ns;当接收机探测器单元数为9 时,探测器恢复时间应≤4.8 ns;当接收机探测器单元数为16 时,探测器恢复时间应≤7.2 ns;当接收机探测器单元数为25时,探测器恢复时间应≤10 ns。

图6 编码后N=25时的误码率(信号“或”)Fig.6 BER with coding in N=25(signal “or”)
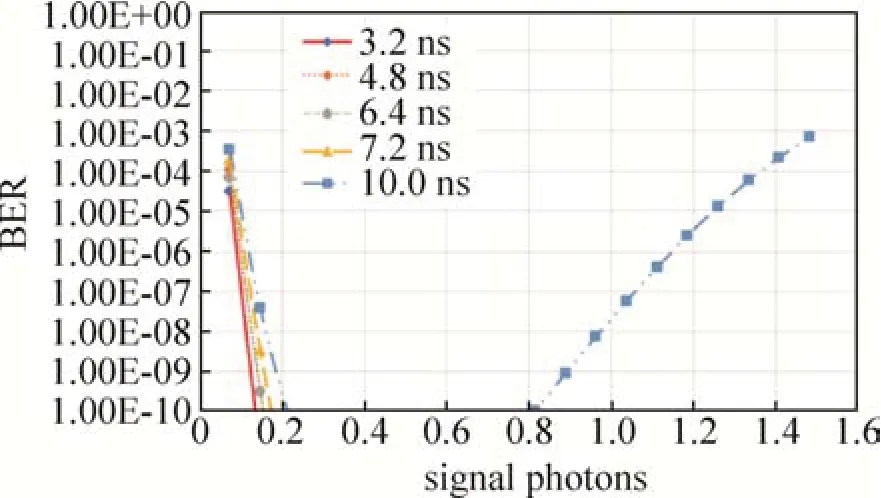
图7 编码后N=36时的误码率(信号“或”)Fig.7 BER with coding in N=36(signal “or”)
当采用最大计数值硬判决时,图8给出了采用RS(15,8)编码,通信速率为1.22 Gbps、暗计数为100 cps、背景光子数为1 000 光子数/秒、16-PPM、接收阵列探测器单元数为16 时,误码率在不同恢复时间、不同信号光子情况下的曲线关系。对比图3 与图8,可以看出两者变化曲线比较接近,但采用信号“或”硬判决更有利于降低通信误码率,这种情况适用于在背景光子数比较少的时候。随着背景光子数的增加,采用最大计数值硬判决的优势逐渐越来越明显,如图9~图10 所示。当背景光子数增加到一定程度,如背景光子数超过109个/秒时,信号“或”硬判决方式已经不再适用,无论探测器恢复时间再短也达到不到误码率优于10-7的通信要求,此时采用最大计数值硬判决在探测器恢复时间较短时,还能满足误码率优于10-7的要求。
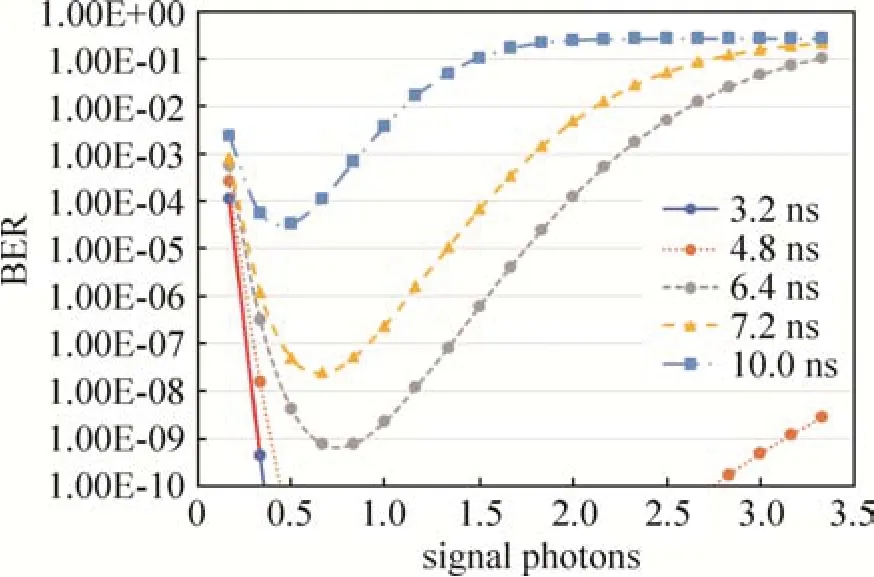
图8 编码后N=16时的误码率(最大计数)Fig.8 BER with coding in N=16(maximum count)
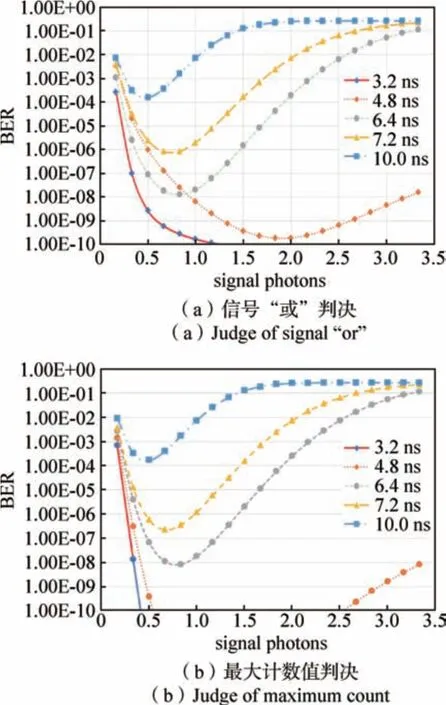
图9 背景光子数为108光子/秒时的误码率曲线Fig.9 BER with 108/s photons in background

图10 背景光子数为109光子/秒时的误码率曲线Fig.10 BER with 109/s photons in background
4 结束语
从单光子探测器的恢复时间特性出发,推导了探测器单元探测概率和虚警概率模型,建立了基于信号“或”硬判决和最大计数值硬判决的多元单光子探测器阵列误码率模型。仿真分析结果表明:在16-PPM 调制体制、RS(15,8)编码下,为实现通信速率为1.22 Gbps、误码率优于10-7,当探测器单元数为4 时,探测器单元恢复时间应≤3.2 ns;当探测器单元数为25 时,探测器单元恢复时间应≤10 ns。同时在背景光子数较少(如夜晚)的情况下,采用信号“或”硬判决可以降低系统误码率,在背景光子数较多(如白天)的情况下,必须采用最大计数值硬判决方式。
猜你喜欢
雷达与对抗(2022年1期)2022-03-31
科学导报(2020年66期)2020-11-02
舰船电子对抗(2020年2期)2020-06-23
心肺血管病杂志(2019年1期)2019-04-22
铁道通信信号(2018年9期)2018-11-10
舰船电子对抗(2016年3期)2016-12-13
广西大学学报(自然科学版)(2016年5期)2016-11-12
军民两用技术与产品(2016年3期)2016-03-26
中国医学装备(2015年10期)2015-12-29
单片机与嵌入式系统应用(2014年7期)2014-03-24
