海上可移动式风机装备研制过程中的关键技术问题
2024-03-22 04:05刘晓雷徐胜文汪学锋孙红军
船舶力学 2024年3期
刘晓雷,徐胜文,汪学锋,孙红军
(1.上海交通大学海洋工程国家重点实验室,上海 200240;2.中海油融风能源有限公司,上海 200335)
0 引 言
随着日益增长的能源需求与日益恶化的生存环境之间的矛盾凸显,可再生能源在世界范围内逐渐受到重视,其增长趋势迅猛。在各种可再生能源中,风能作为一种稳定、高效、清洁的新能源,逐渐受到世界各国的重视,近年来风能利用技术和开发装备呈现爆发式的进步和增长。2022年,全球年新增风电装机容量达到77.6 GW(见图1),近5 年的平均年增长率为13%。由于陆上土地使用政策的各种限制、海上空间资源更大和海风资源更强劲、更稳定等原因,风能开发逐渐从陆地走向海洋。2018年至2021 年海上风电新增装机容量从4.4 GW 增长到21.1 GW,其中我国贡献了50%左右,约等于世界其他各国的新增装机总和[1]。海上风电作为我国可再生能源发展的重点领域,一方面有利于实现“双碳”目标,另一方面也有利于推动能源结构优化和构建能源安全体系。

图1 全球风能理事会公布的风电装机数据Fig.1 Wind power installation data released by Global Wind Energy Council
根据《中国风电发展路线图2050》[2]介绍,我国50 米以内水深的近海固定式风电储量为5 亿千瓦,水深50~100米的风电储量为15.3亿千瓦,远海风能储量为9.2亿千瓦,其中水深大于50米的远海风电储量占比超过80%。另外,随着近海风电的持续高强度开发,近海风电与近海渔业、航运业的矛盾更加突出[3](见图2),近海风电的发展空间受限,因此,加大开发更深、更远海域的风能是必然趋势。

图2 近海风电与渔业、航运业的矛盾Fig.2 Contradiction between offshore wind power and fishery&shipping industries
由于固定式风机基础(有效水深小于60 m)的投资成本随水深加大而急剧增加[4],为此,近年来学术界和工业界开发了采用系泊系统的浮式风机,如我国两台系泊漂浮样机(三峡“引领号”[5]和中船“扶摇号”[6],如图3 所示)已于近期成功就位并开始发电。但是考虑到安装和采购成本等原因,系泊式漂浮风机的有效作业水深小于200 m[7],难以开发更深海域中蕴含的大部分风能。另外,对于很多远离电网的远海用电场景[8],还面临着能源补给成本高和亟需节能减排等问题。
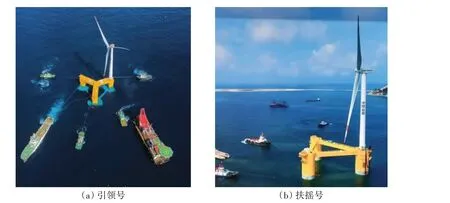
图3 我国系泊式漂浮风电样机Fig.3 Chinese moored floating wind power prototype
为了开发更丰富的深远海风能和满足远离电网的深远海用电需求,2021 年上海交通大学与横滨国立大学Xu 等[9]率先提出了可移动式风电装备概念(图4(a)),开展了基于简化风力发电模型和动力定位控制系统的漂浮风机可行性研究。可移动式风机是一种既能利用海上风资源进行发电储能,又具备一定自航能力的海上能源装备。相比于系泊漂浮风机存在的水深受限、系泊锚固成本高和拆装困难等问题,可移动式风机海上可布设的空间更广阔,可以自动寻找更优的风资源,对环境的影响更小,应用场景更多、更灵活,智能化特色更明显,因而发展潜力更大。在经济性方面,系泊漂浮式风机的系泊系统采购成本一般占整体建造成本的11%左右[64],而且系泊系统的安装费用随水深增大而剧增,相比之下,可移动式风机的推进系统建造成本要远小于系泊系统。虽然可移动式风机的推进系统会持续消耗风机发出的电能,在相同风速条件下,可移动式风机的瞬时有效发电功率会低于系泊漂浮风机,但是可移动式风机的航行能力却使其可以前往风力更稳定更安全的海域,故而可移动式风机全服役周期内的有效发电量反而可能会大于系泊漂浮风机。

图4 可移动式风机及其应用场景Fig.4 Mobile wind turbine and its application scenarios
可移动式风机装备可为深远海作业的船舶、海洋平台等生产生活设施提供可持续和低成本的清洁能源[10],其典型应用场景(见图4(b)~(h))有:
(1)移动作业的船舶和海洋平台:海洋油气钻井平台、海上起重船、铺管/铺缆船、深海采矿船、养殖工船、绞吸式挖泥船等。这一类装备的作业特点在于转场频次高、频繁转换作业地点和用电需求大[11-12]。由于可移动式风机灵活性大,故可充当此类装备的“移动充电宝”,支撑其持续作业,减少补给成本。
(2)海上民用运输船舶,比如远洋客船和货船[13]。深远海分布的可移动式风机,可以为远洋客船和货船提供“远海充电”,使其快速充电或更换储能电池。
(3)深远海定点作业的海洋平台,比如油气生产平台、渔业养殖平台、浮式生产储油轮(FPSO)、海洋环境监测平台和未来海上数据中心[14-16]。配置多台可移动式风机,通过电缆连接可为这些装备持续输电,实现即发即用。
(4)海岛生产和居民用电[17]。我国是名副其实的“万岛之国”,海岛数量大、分布广、用电需求差异明显。目前对于离岸较近的海岛,普遍采用联网用电,通过电缆将大陆与海岛的电网连接起来。而对于远离海岸的海岛,联网成本极高,一般依靠自备柴油发电机组供电,但燃料补给运输成本高、环境污染大、用电成本高,影响海岛产业和居民经济发展[18]。因此根据海岛用电需求和当地环境条件,配备合适的可移动式风机的机组、数量和电网接入方式,可有效缓解当地用电难、成本高的问题。
由于可移动式风机具有绿色环保、灵活布置和不受水深限制等特点,其概念一经提出就引起了国际学术界和工业界的广泛关注。同期,Willeke[19]对一种Spar形式的移动式风机开展了可行性研究,研究发现Spar 形式风机摇摆运动稳定性差,通过下浮体增加构件可得以有效改善;Connolly 和Crawford[20-21]提出了一种理想的风机及推进系统解析模型,用以进行可移动风机发电效率研究,首先与Xu等[9]结果进行对比,验证模型正确性,然后详细研究了浮体阻力、风机、推进器尺寸对发电效率的影响;Raisanen 等[22]提出利用可移动式风机组成开阔海域大型风场,通过制氢储存能源;另外,据悉Kongsberg Maritime Inc.也在联合著名高校的专家、教授和学者组建联合体,就可移动式风机的关键技术难点、技术经济性、产业化应用前景和未来发展趋势等进行深入调查研究。
2022 年,挪威航运巨头Odfjell 集团子公司Odfjell Oceanwind 计划建设一支可移动式海上风机(MOWU,Mobile Offshore Wind Units)船队[23],主要为远海微网供电,促进海上油气生产脱碳。根据海上油气作业的用电需求,MOWU 可快速部署到油田中并提供临时电力。该模式非常适合为这种有限时间的油田生产作业提供电力。Odfjell Oceanwind 专门设计了一款新的漂浮式基础Deepsea Semi,最大可安装15MW 风机,适用于60~1300 m 水深,该基础已获得挪威船级社DNV 颁发的原则性批准(approval in principle),主要结构认证(main scantling approval)正在进行,首批移动式海上风机计划于2024年投入使用。近期,Odfjell Oceanwind与欧洲能源集团Source Galileo Norge签署了战略合作协议,以推动可移动式海上风机发展[24]。
可以看到,国内外关于可移动式风机的研究均刚刚起步,为了加快我国开发可移动式风机装备的步伐,同时提高深远海资源开发技术能力,有必要梳理出可移动式风机设计、建造和工程应用过程中需要解决的关键技术问题。对于系泊漂浮式风机以及动力定位(DP)领域已经取得的研究成果也需要灵活采纳,避免重复研究。本文结合国内外最新的相关研究资料,结合作者自身的理解和探索,对研制可移动式风机过程中需要重点关注的技术问题进行了探讨,期望为该领域研究人员提供一些参考。
1 可移动式风机的显著特征
与系泊漂浮风机等海洋工程结构物相比,可移动式风机具有如下多个特征:
(1)在系统组成及功能上,可移动式风机与其他海洋工程结构物有很大的差异。与系泊漂浮风机相比,可移动式风机无系泊系统,其定位功能通过带DP的推进系统实现,因此可移动式风机具备航行功能;而与带DP 动力定位的工程船舶相比,可移动式风机上配置发电设施和储能装置[26],因此又具备发电-储能-输电能力,但因重心较高,需要重点关注其稳性。
(2)可移动式风机具有独特的发电模式。虽然整体上深远海的风资源更强劲、更稳定,但是海上风向、风速是随时间和空间变化的。可移动式风机的航行能力,应结合天气预报及历年风资源统计数据,使其可以自动前往风力更稳定、更安全的海域[26],即可动态调整发电地点,也可边航行、边发电,还可提前避开台风路径。图5为某海域风能密度统计值及最优路径规划示意图。

图5 某海域风能密度统计值及最优路径规划示意图[25]Fig.5 Statistical values of wind energy density and schematic diagram of optimal path planning in a certain sea area [25]
(3)考虑到系泊缆之间不能互相干扰,因此系泊式漂浮风机之间需要保持较大距离,一般需大于3~6 倍水深[27]。而对于可移动式风机来说,只要配置成熟的智能避碰功能,在有限的海域范围可以布设更多的风机,因此可移动式风机应用更灵活,智能化特色更明显。
(4)可移动式风机在定点发电、按照既定路径移动和对外输电作业时,不能让它随风浪流任意漂移[28],因此带动力定位功能的推进系统极为重要,需要有足够的推进能力和操纵性。
(5)可移动式风机是一种前所未有的新型海洋工程结构物,集抗沉、发电、储能、输电和推进于一体,技术挑战性更高,系统组成和动态响应更复杂,因此需要建立一种适合可移动式风机的动态响应分析方法,指导其工程设计。
(6)在恶劣多变的海洋环境下,可移动式风机的典型工况有定点/航行发电、按照既定路径航行、连接/解脱输电、避碰障碍物和台风避险等,因此需要建立适应复杂多工况的可移动式风机作业策略。
(7)可移动式风机的成本投入和经济效益与系泊漂浮风机不同,主要体现在:可移动式风机的投入使用可在合适的码头完成,而系泊漂浮风机需要采购、安装系泊和锚固系统,并且要将风机湿拖或干拖至工作海域[29];可移动式风机运维方便、几乎无拆除成本,而系泊漂浮风机的拆卸成本巨大;可移动式风机动力定位系统安装成本高,并且运营消耗自身电力储备,因此需要对其长期发电量和耗电量进行对比,优化系统配置;系泊漂浮风电场一般要配备海上升压站和长距离电缆[30],并且有消纳压力,而可移动式风机主要为海上平台和工作船舶等供电,不需要昂贵的输电装备,几乎无消纳压力。
(8)与其他海上风机相比,可移动式风机对海洋生态环境的影响更小。系泊和固定风机的水下定位装置对工作海域的生态环境影响巨大,尤其是在安装阶段[31]。可移动式风机不需要水下定位装置、灵活选择作业海域的特性,使其可以避开海洋生物的栖息地和迁徙路径。
由于这些特点,使得可移动式风机在研制和开发过程中有许多理论问题和工程实际问题需要解决。以往的研究经验表明,对相关理论问题的探索,还可以促进基础学科和交叉学科的发展,提高我国的基础研究水平。因此,选择可移动式风机的研究和开发,除了能有效缓解全球突出的环境保护问题、提高深远海空间资源和可再生能源开发能力,还具有较大的理论意义。
2 可移动式风机关键技术问题
根据可移动式风机的显著特征,在研究和研制可移动式风机的过程中需要解决一系列的理论问题和工程实际问题。
2.1 基础选型
可移动式风机主要包括浮式基础、塔架、风机、推进器和储能装置,后四者的选型主要依赖于浮式基础的尺度和性能,所以可移动式风机需要重点考虑其浮式基础选型。系泊漂浮风机基础通常有四种结构形式(见图6):半潜式、Spar 立柱式、张紧式和驳船式[32]。半潜式基础形式上构造比较复杂,但是耐波性能优异,适宜在较为恶劣的海洋环境中生存;立柱式基础由于重心较低且水线面积相对较小,因此具备较好的稳性和水动力性能,另外还可以通过在立柱上设置螺旋侧板降低其涡激运动[33];张紧式基础整体垂向运动较小[34],但是张力筋腱疲劳性能较差,并且采购和安装成本高;驳船式基础由于垂荡和摇摆周期短,所以整体耐波性较差,通过合理的设计,中间月池尺寸可以有效改善其耐波性能[35]。整体上来看,前三种形式基础的水动力性能较好,但其水下结构复杂、吃水大、且迎流面积大,而第四种形式正好相反。船型基础由于具有流线型下船体,所以也是可移动式风机的一个潜在可行选项。因此,如何根据实际应用场景选择可移动式风机合适的基础形式,是首先需要解决的问题。合理选型需要全面考虑各种因素,具体有:(1)工作海域环境;(2)对性能的要求,比如快速性、稳性、耐波性等;(3)推进器、储能装置和基础形式的匹配;(4)全生命周期的经济成本;(5)国内的相关建造和采购配套能力;(6)对生态环境的影响。准确考虑和评价这些因素需要依赖科学的数学模型,而模型的建立又离不开相关理论的发展和试验验证。

图6 目前主流的几类系泊漂浮风机基础[32]Fig.6 Main types of foundation for moored floating wind turbine
2.2 概念可行性论证
选型后首先要进行概念可行性论证,需要确定材料、制造工艺、运输和安装方法,然后通过基本的静态理论模型,对概念设计方案进行发电能力估算、耗能估算、作业能力评价、成本估算、寿命估算和经济效益估算[36],这些确定依据和估算方法的理论基础仍然离不开科学的数学模型。
2.3 可移动式风机系统动力分析、设计技术
由于可移动式风机涉及浮式基础的水动力、风机的气动力、风机控制系统的伺服载荷、推进系统的推进力,而这些物理量之间又存在高度的耦合关系,因此可移动式风机动力特性的预报方法与一般的船舶以及海洋平台相比有很大的区别[37],从而决定了它是可移动式风机研制过程中需要解决的重点问题。因此,有必要建立考虑浮式基础的水动力、风机的气动力、风机控制系统的伺服载荷、推进系统的推进力的可移动式风机动力系统仿真技术,对各个部件进行准确建模,计入所有载荷的影响,这是可移动式风机设计的理论基础。在此基础上进一步研究:
(1)由于可移动式风机比固定式风机和漂浮风机的工况更多,所以需要通过研究考虑多工况的浮式基础、风电系统、推进系统匹配技术,从而实现整体的经济性和有效性。
(2)可移动式风机是否具备可行性的一个重要方面,是其发电量能否有效覆盖其定点和航行作业时推进系统的耗能[38],因而建立海洋环境条件下可移动式风机作业能力的分析技术是非常必要的。
(3)海洋环境复杂多变,尤其是极端海况会在可移动式风机上形成巨大的波浪作用力[39],因此,需要建立极端海洋环境下整机系统安全性校核技术。
2.4 深远海可移动式风机装备作业决策技术
虽然海洋环境复杂多变,但是在一定时间和空间范围内,风浪环境是相对平稳的,此时可移动式风机就凸显出其灵活性的优势,在基于天气预报和海风资源数据库的条件下,建立可移动式风机自动寻优的作业规划技术[40],从而实现发电效率最大化。
由于可移动式风机作业方式的独特性,还必须基于不同的海况条件和作业模式,选择不同的风电机组控制策略(变桨、偏航、停机等[41])。对于台风等极端天气,可移动式风机可以避开台风路径进行作业。还需建立可移动式风机的抗台技术,以应对无法避开台风的情形。
2.5 深远海可移动式风机充电装备连接输电和解脱方案安全性评估技术
可移动式风机的“海上充电宝”功能,是通过与用电平台连接输电实现的。理论上讲,在海洋环境中可移动式风机和用电平台上运动幅度最小的位置一般位于船舯,故将连接装置设置在该位置处可以提高连接接头的可靠性。不同用电平台有不同的电量功率需求、总布置以及运动特性,因此需要进行连接输电和解脱方案的需求分析与设计研究。在用电平台和可移动式风机整个连接过程中,需要防止两者距离过近导致碰撞或者两者远离导致连接结构的破坏,即需要进行连接和解脱工况下推进器控制策略研究,将两者距离及相对方位角限制在安全范围内,在对连接和解脱这一物理过程安全性进行评估时,必须准确计入多浮体之间的水动力干扰。
2.6 可移动式风机整机工况水池模型试验技术
任何一个理论的建立及发展,都离不开试验的验证。从上述内容可以看到,在可移动式风机的研究及设计过程中,可以发展出一系列新理论和方法,但其准确性往往需要通过试验结果来验证,虽然实尺度或者小规模的样机海上试验验证结果更加准确[42],但其成本太高,而且海洋环境不可控,很难定量得出各个因素的影响,因此,大缩尺比模型的水池试验(见图7)是现在的主流手段。可移动式风机作为新型海洋工程浮式结构物,直接采用已有浮式风机或者船舶的试验方法是行不通的,主要原因在于:

图7 漂浮风机水池试验[32]Fig.7 Floating wind turbine model test[32]
(1)随着风电机组容量增加,叶片长度和塔架高度也在不断增大,结构柔性所引起的高阶非线性响应逐渐显著,因此在模型设计时也需要体现可移动式风机的刚柔耦合特性[43];
(2)模型试验时需要保证气动、水动和推进载荷同时相似,只采用Froude 相似或者雷诺相似是不可行的[44],可以采用混合缩尺比结构,建立一种适合可移动式风机的全耦合水池模型试验技术。
(3)有效发电功率是可移动式风机的显著特性,因此需要保证电能在水池模型和真实物理场景下的转换关系,并且要同时模拟可移动式风机的发电功率和耗电功率。
(4)对于可移动式风机典型的操作工况,在水池试验中实现连接输电和自动解脱也是较大的挑战,尚无传统海洋平台相关水池的实验技术可供参考。
(5)在系泊漂浮风机生存工况水池试验时,其定位性能是依靠系泊系统实现的。另外,水池模拟海洋平台的DP性能一般会选择较低的海况。因此,需要建立高海况条件下可移动式风机推进系统可靠性的水池试验技术。
2.7 建造及安装技术
与传统海洋平台和船舶的建造流程基本相同,目前漂浮风机的建造主要在船坞内完成,风电机组安装在码头完成,利用湿拖作业到达目标海域进行系泊安装(见图8)。但是未来可移动式风机的需求量巨大,而国内沿海城市的船坞数量不足并且使用成本较高[45],如果进行大批量采购,则对单个机组的成本非常敏感,因此,开发兼具技术可行性和经济性的可移动式风机的批量建造技术是非常重要的。比如,模块化预制件可以提高建造效率[46],这就要求可移动式风机在结构设计时采取模块化的思路。另一方面,可以考虑直接在码头上进行浮式基础的制造和安装,这样可以大幅减少建造和运输成本。

图8 驳船式漂浮基础建造和漂浮风机湿拖Fig.8 Construction of barge type floating foundation and sea-transportation of wind turbine (in-water towing)
2.8 可服役性、耐久性
当可移动式风机对外连接输电时,波频运动及风机自身结构振动,可能会削弱连接接头的抗疲劳性能,为此可采用被动式的液舱减摇系统,减小整体的摇荡运动。
因为天气变化,可移动式风机在海上有可能存在GPS 位置信息丢失的情形[47-48],因此需要在每台风机上配备短距离位置通信系统,结合路径规划和智能避障功能,从而避免海上碰撞。
耐久性对可移动式风机来说也是十分重要的,一方面频繁的返港维修会影响其有效发电作业时间,另一方面需要建立准确合理的可移动式风机剩余寿命的评价方法及相关装置,尽量延长其使用寿命。因此,飞溅区的腐蚀防护需要重点关注[49-50],可以考虑喷漆和阴极保护措施,也可以采用耐腐蚀性更好的混凝土浮式基础。
2.9 事故工况及风险评估
可移动式风机需要保证其在紧急情况下的安全性,一般来讲,其安全事故主要来源于浮冰、船舶以及其他海洋结构物的碰撞[51]。波浪等周期性载荷所致疲劳裂纹引起的局部破坏和漏水[52],以及单个推进器失效导致推力不足[53],也是在设计阶段作为事故工况需要全面考虑的问题。根据构件和功能失效程度,建立事故工况等级的评价方法。低等级的事故发生后,可移动式风机需要保留足够的浮性和稳性,有一定的自航能力自动回港。对于高等级的事故工况,安全监控系统能够及时将事故等级和坐标信号发送给运维方。
对于可移动式风机在海上可能发生的碰撞,可以采用橡胶材料制作的护舷对其进行保护,在碰撞发生时这些弹性材料可以吸收一部分能量[54-55]。通常情况下事故载荷是很大的[56-57],如果要求可移动式风机结构能够抵御大部分事故载荷,所需建造成本将是巨大的,但一旦事故发生,会带来负面的行业和社会影响,因此需要研究事故发生的概率及后果,准确评估其风险。
2.10 社会生产及生态影响
由于可移动式风机下部不需要系泊定位,在有限空间里可以同时布置数量庞大的机组,因此,同一海域可能有多台机组在同时作业,必然对该地区的社会生产及生态产生冲击[58-62],这包括:
(1)多台机组同时作业所产生的噪音是巨大的,所以应当建立候鸟和鱼群栖息地和迁徙时间及路径数据库,并依据相关时空信息确定可移动式风机的作业禁区。
(2)可移动式风机的作业路径规划应当避开主要航道,避免与从事作业的其它船舶发生碰撞,造成不必要的损失。
3 结 语
可移动式风机由于具有自动前往风能资源更优的地点、不受水深限制和可灵活布置等特点,可开发深远海蕴含的大部分风能,同时还可为远海生产、生活设施进行供电,因此有着广泛的商业化应用前景。国内外关于可移动式风机的研究均刚刚起步,为了保证我国深远海风能资源开发技术领域的领先地位,有必要尽快开展相关研究工作,首要工作就是明确可移动式风机研制过程中需要解决的关键技术问题。本文通过归纳总结国内外文献中的最新研究进展,结合作者自身的理解和探索,从多个方面提出亟待研究的问题,期望为该领域研究者提供参考。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
山东冶金(2022年2期)2022-08-08
能源(2018年5期)2018-06-15
能源(2017年9期)2017-10-18
现代工业经济和信息化(2016年12期)2016-05-17
工业设计(2016年11期)2016-04-16
安徽冶金科技职业学院学报(2015年3期)2015-12-02
肿瘤预防与治疗(2015年1期)2015-09-26
水电站机电技术(2014年1期)2014-09-26
中国交通信息化(2014年3期)2014-06-05