舰船磁场与航向关系的试验分析
2007-01-28 08:05,,
船海工程 2007年6期
,,
(海军工程大学 兵器工程系,武汉 430033)
舰船磁场是铁磁性舰船受地磁场磁化而产生的附加磁场,产生局部磁异常,从而引起周围空间磁场分布的变化。受地磁场磁化形成的舰船总磁性可以分解为固定磁性和感应磁性。在一定时间内,固定磁性可认为为固定不变;感应磁性的大小和方向则随舰船航行地区的地磁场的数值成比例地变化。
以往在研究航向与舰船磁场的关系中,通常需要测量东、南、西、北四个不同航向下的舰船磁场数据。本文通过磁场测量试验,解释了舰船磁场随航向的变化呈正余弦的原因,提出只需测量任意两个不同航向下的舰船磁场值,便可以对任意航向下的舰船磁场分布行进研究。
1 磁场测量试验
在一个可以旋转的测量台上对某型舰船船模进行磁场垂直分量的测量,磁探头放置在船模吃水线下一倍船宽的深度。从船首到船尾均匀等距布置了18个测量磁场垂直分量的磁探头在船模的龙骨下处。以正北方向为起始点,逆时针旋转测量台,每隔30°,对舰船磁场的垂直分量进行一次测量。
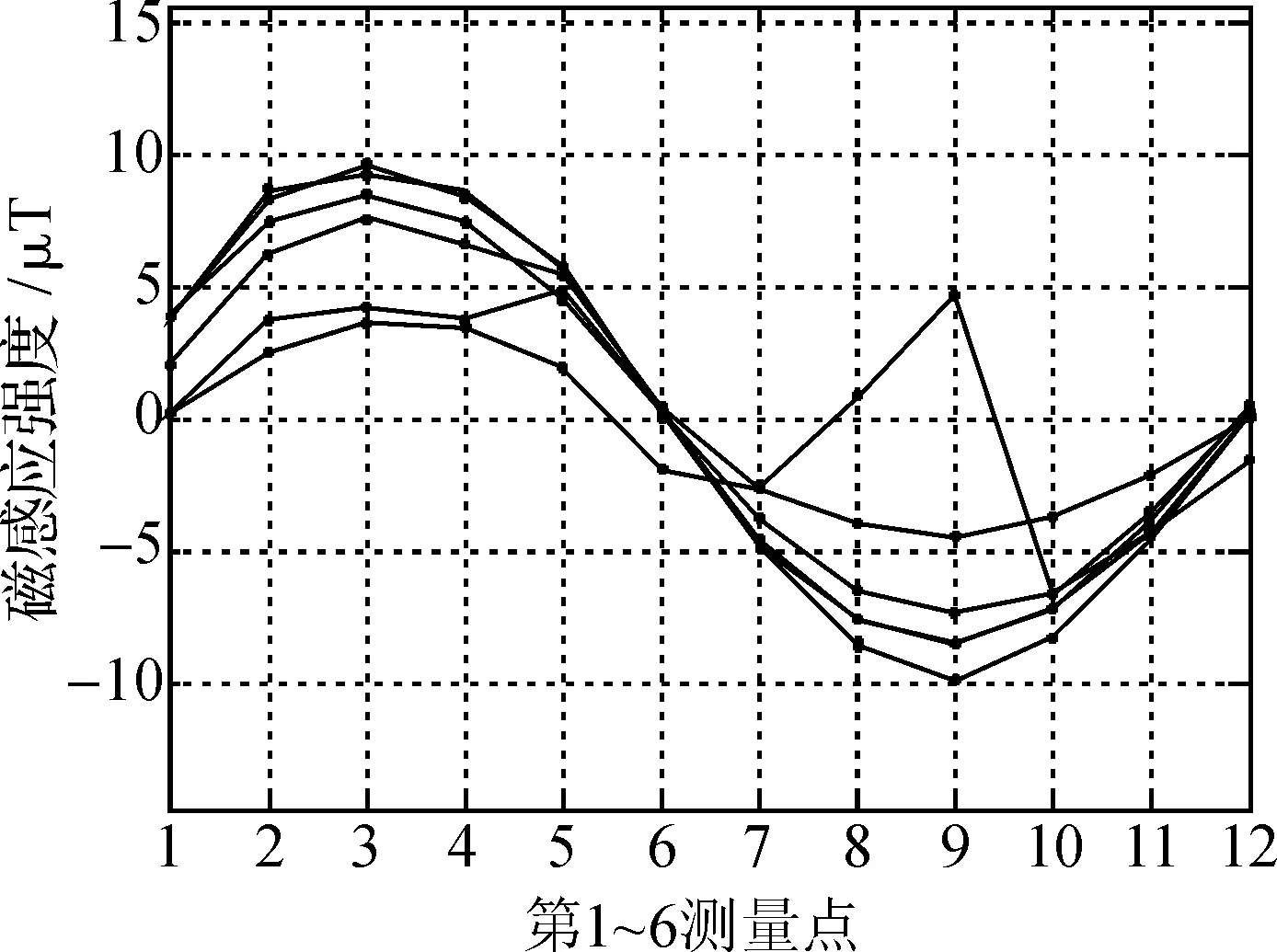
a)
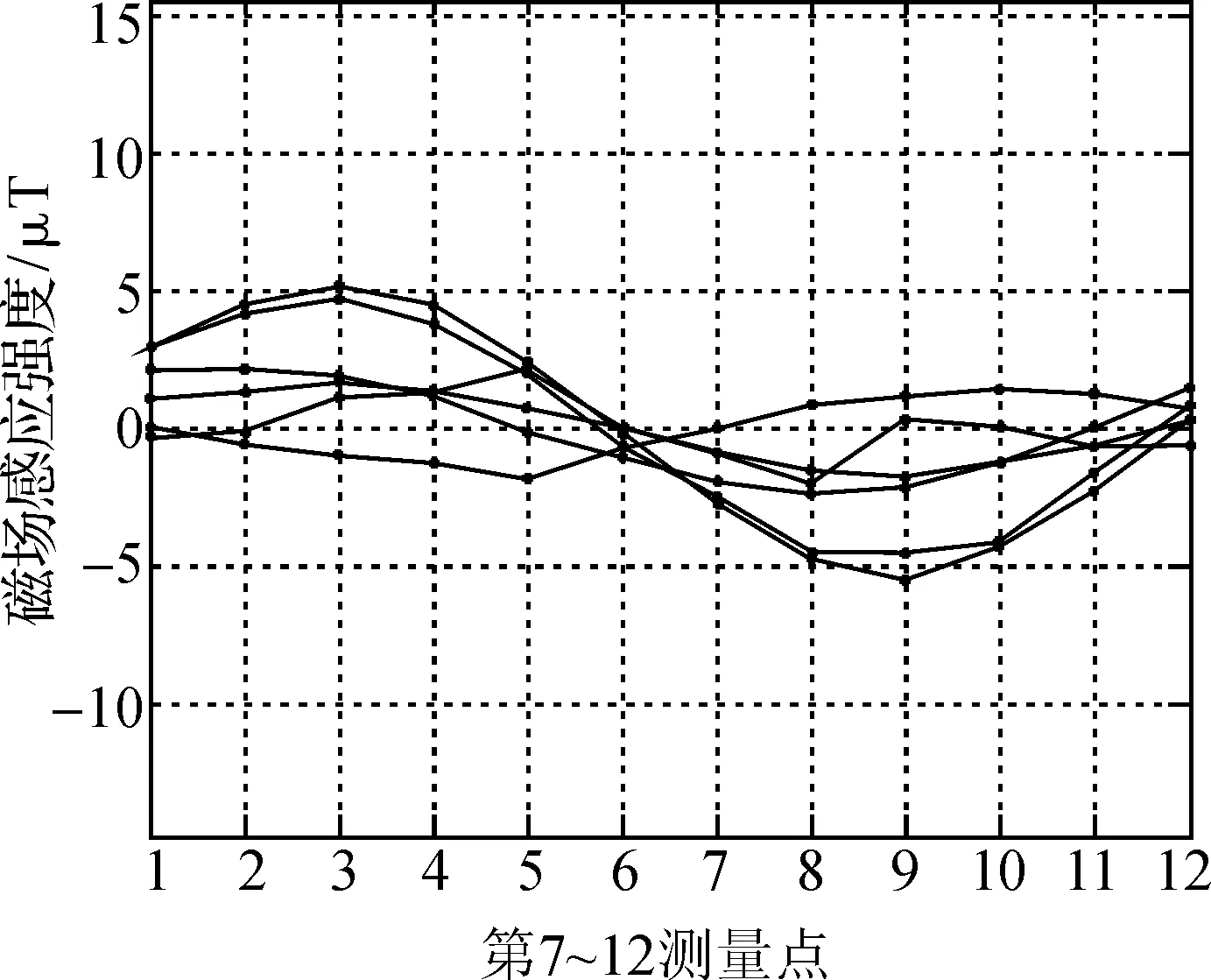
b)
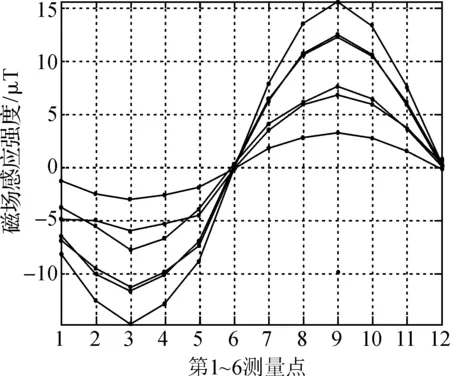
c)图1 龙骨下测量点的磁场垂直分量在不同航向下的分布曲
被测船模龙骨下一倍船宽的深度处第1~18测量点的感应磁场垂直分量随舰船方向不同的变化见图1。其中,横坐标1~12代表从30~360°,纵坐标是垂直磁场的测量值。
2 不同航向下的磁场建模
2.1 固定磁矩与感应磁矩的分离
以最简单的单旋转椭球体为模型。如图2所示,图中旋转椭球体在几何尺寸上与舰船相当,其长半轴为a,短半轴为b,几何中心与磁性目标的中心重合,设磁性目标在P(xi,yi,zi)处所产生的磁场三分量为Hxi,Hyi,Hzi,则有
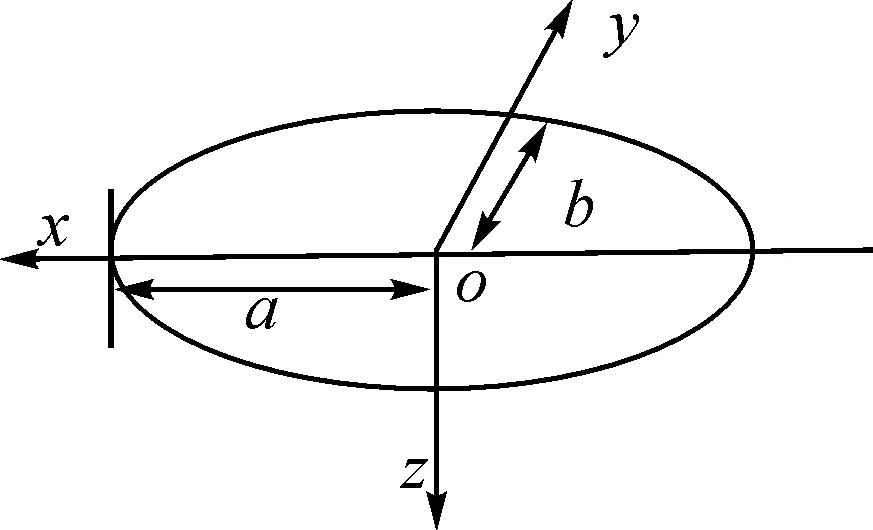
图2 旋转椭球体模型
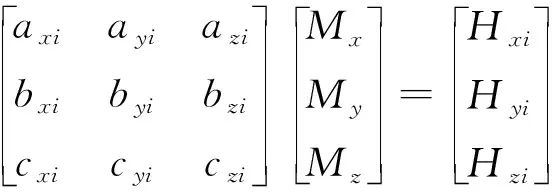
(1)
式中:Mx,My,Mz为模型参数,分别是旋转椭球体沿x轴、y轴、z轴方向的磁矩分量;
bxi=ayi;
cxi=azi;
cyi=bzi;

在上述单一旋转椭球体建模过程中,可用最小二乘法计算出模型参数的估计值,但在实际应用中,为了满足精确地估计模型参数,可以用逐步回归方法求解模型参数[2]。同时,旋转椭球体的磁矩随航向和航行地点的不同而不同,Mx、My、Mz与地磁场和航向角的关系为[1]:
Mx=Mxp+Kx(HNcosθ+HEsinθ)
My=Myp+Ky(HEcosθ-HNsinθ)
Mz=Mzp+KzHD
(2)
式中:Mxp、Myp、Mzp为舰船固定磁矩,反映了舰船的剩磁,是一组基本不随航向和航行地点变化的常数;Kx、Ky、Kz为一组由舰船形状和材料决定的磁化系数,也是常数;HN、HE、HD为地磁场的北向分量、东向分量和垂直分量(地磁场是一种弱磁场,在一定区域范围内,如果不考虑磁暴等因素,可以认为其大小、方向是较为稳定、均匀的,可以通过磁探头进行测量得到);θ为舰船航向与北向的夹角(东偏为正)。
假设建模的两个航向分别为θ1和θ2,通过式(1)求解出对应的舰船模型磁矩分别为(Mx1,My1,Mz1)和(Mx2,My2,Mz2),代入式(2),则有:
(3)
(4)
2.2 分析磁场分量与角度的关系
以垂直方向Hz为例,对于Hx、Hy也可同样推导。由上述得:
Hzi=cxiMx+cyiMy+cziMz=

sin(θ+φ)+(cxiMxp+cyiMyp+cziMz)
(5)

当用两个不同航向的磁场数据进行建模时,便可求出舰船的常数值Mz、Myp、Kx、Ky,因而对于同一艘船来说(cxiMxp+cyiMyp+cziMz)、(cxiKxHN+cyiKyHE)、(cxiKxHE-cyiKyHN)均为常数。当舰船航向发生变化时,Hz是与航向成正弦关系的,从而解释上述试验现象。同理,Hx、Hy亦是与航向成正弦关系的,从而能有效地识别舰船航向[3]。
在实际情况下,由于直接用解析方法求解舰船磁场相当困难。目前主要依靠测量和磁场建模来研究舰船磁场分布情况。舰船磁场建模都立足于具体的磁场测量数据,一旦舰船航向发生变化,就必须重新测量以获得新数据。上述推导在理论上证明:只要进行舰船任意两个不同航向下的磁场测量工作,就可以推导出任意航向下的舰船磁场分布,能有效减少舰船实际测量次数。
3 船模测试与建模
利用前面给出的方法,对同一艘船模在东、南、西、北四个不同地航向进行磁场数据测量。为了检验所建模模型的有效性,任意组合两组的磁场数据,通过前两组数据计算出Mz、Mxp、Myp、Kx、Ky,然后对另两组磁场数据进行估算。将计算值与测量值进行对比,见图3,用检验误差e评价。
式中:Hxi、Hyi、Hzi为用于计算的磁场测量数据;Hxi′、Hyi′、Hyi′为利用磁场测量数据所建模型的计算值。
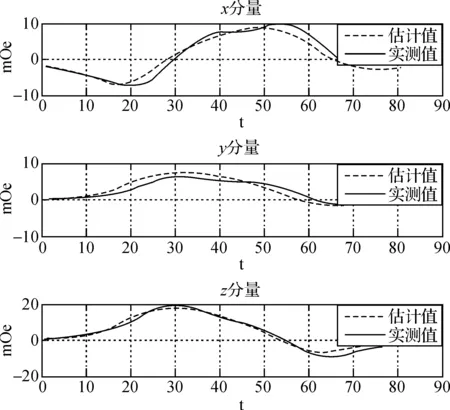
a) 南航向龙骨下
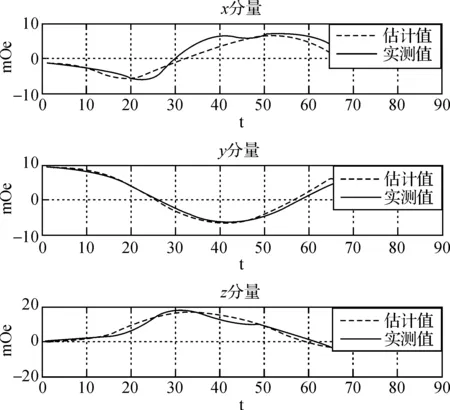
b) 西航向龙骨下图3 龙骨下磁场分量在南和西两个航向下的通过曲线(深度34.56 m)
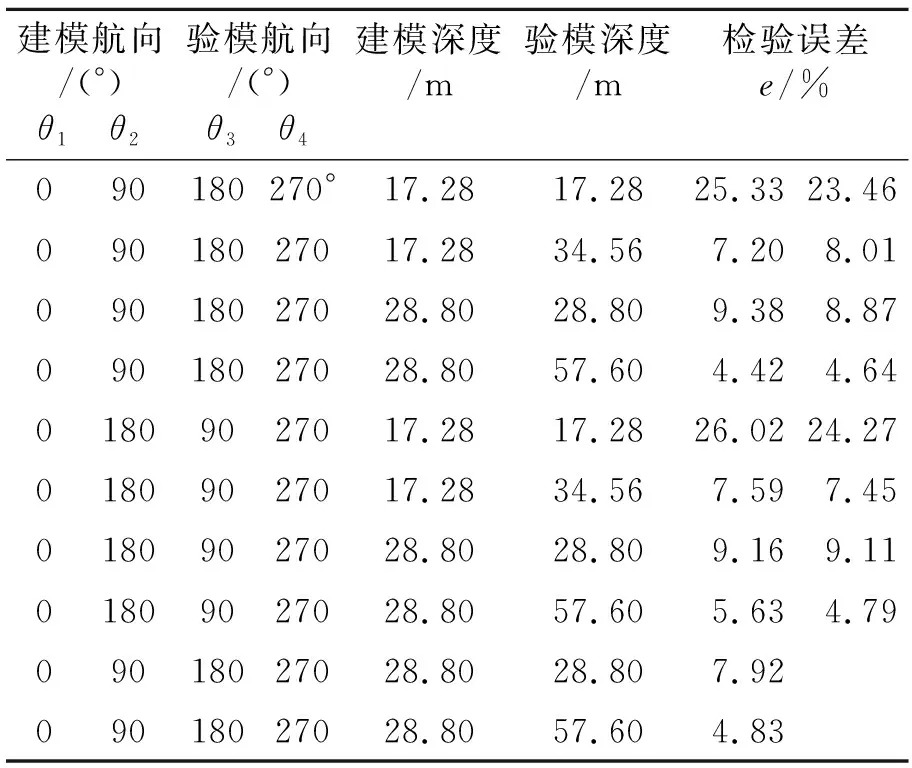
表1 不同航向下磁场建模的计算结果
通过以上计算结果,分析如下:
1) 把舰船等效为旋转椭球体进行计算时,当计算深度h>2B(B为船宽)时,可得较满意的结果;但当计算深度h<2B时,因实船与理想椭球体在外形上差异较大,加上船内铁磁物质分布不均匀,计算结果有较大误差。
2) 在有多组不同航向的磁场数据的情况下,可以用最小二乘法估计固定磁矩和感应系数,减少误差。
3) 磁探头只要测量两个不同的方向的磁场便可以推导任意航向的磁场值,反之,知道任意航向的磁场值亦可以推导出航向。
4 结论
因为地球是弱磁场,它对舰船的磁化作用是线性的、可逆的,导致了在试验中表现出较规律的现象,舰船磁场分量随航向的变化呈正弦变化。从而证明:只要对舰船任意两个航向下的磁场测量,不但能就任意航向下的舰船磁场分布进行研究,能有效减少舰船实际测量次数,还能作为识别舰船航向的一种可行方法。本文是基于单旋转椭球体进行建模的,但对于其它模型如单椭球体加偶极子阵列混合模型等,也是成立的。
[1] 叶平贤,龚沈光.舰船物理场[M].北京:兵器工业出版社,1992.
[2] 林春生.舰船磁场信号检测与磁性目标定位[D].武汉:海军工程大学,1996.
[3] 刘 君,李庆民,李 华.利用舰船磁场特征量对舰船进行定位的方法[J] 水雷战与舰船防护,2006(1):44-46.
[4] 陈宝林.最优化理论与算法[M].北京:清华大学出版社,2006.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
导航定位学报(2022年2期)2022-04-11
智能制造(2021年4期)2021-11-04
矿山测量(2021年4期)2021-09-18
新世纪智能(高一语文)(2021年3期)2021-07-16
航天器工程(2019年3期)2019-07-31
数字海洋与水下攻防(2019年2期)2019-06-28
民用飞机设计与研究(2019年4期)2019-05-21
北京航空航天大学学报(2017年3期)2017-11-23
电子制作(2017年24期)2017-02-02