某型雷达方位自动标校系统设计与应用
2010-01-29 06:18孙国平
电子科技 2010年1期
孙国平
(中国船舶重工集团公司 723所,江苏扬州 225001)
雷达方位的标校是指使雷达天线的实际方位与雷达监控软件中的示意方位相互统一的过程。雷达装备在转场时,载车停放的方位存在随机性,雷达天线的实际方位和雷达监控软件的示意方位存在相对差量,造成雷达在工作时对目标方位判别有误。因此在雷达转场时需要对天线方位进行标校,以避免雷达天线实际方位和示意方位之间角度存在相对差量,使雷达正确判别目标的方位。这种标校通常由系统自动完成,但某型雷达伺服系统功能不够完善,雷达的方位标校不能自动完成,在雷达转场时需对雷达方位进行人工标校,其标校过程较为复杂,标校效果不理想,且存在角度偏差。本文针对该型雷达人工标校的问题,提出了一种自动标校方法,并进行软硬件设计,以降低雷达标校工作的复杂性,实现对天线方位的准确标校。
1 人工方位标校分析
1.1 某型雷达天线方位回传系统
雷达工作时,需要了解雷达天线的当前工作状态,包括天线的方位、仰角及扫描方式等,这些信息通过雷达天线的反馈系统回传到控制端。对于方位标校而言,只涉及到天线的方位状态,所以只讨论天线方位信息的回传。该雷达天线方位是由自整角机通过轴角编码后形成 12位二进制数的天线方位数据,再将此数据并行四路分别送至数采分系统、信处分系统、监控分系统、终端分系统。其结构图如1所示。

图1 某型雷达天线方位回传系统
1.2 人工标校的方法步骤
该雷达天线的人工标校是通过调整自整角机转子位置来实现的,自整角机位于密封腔内,同密封罩分别用螺钉固定在天线底座上,其剖面结构如图2所示。

图2 自整角机剖面图
雷达在进行标校时需要同时拆下密封罩和自整角机,然后调整自整角机转子,调整完毕后重新固定自整角机,最后再安装密封罩进行密封,其标校步骤如下:
(1)确定雷达天线所指向的实际方位。
(2)雷达加电,打开监控计算机执行监控主程序,查看监控软件所示雷达天线方位,以确定自整角机转子的转动方向及转动量。
(3)拆开自整角机的密封罩固定螺钉,取下密封罩。
(4)拆下自整角机并对其转子进行角度调整,调整时需监控端职守人员配合,转动自整角机转子,直到监控软件天线示意指向方位与天线指向方位相同。
(5)安装自整角机,将调整好的自整角机用螺钉固定于天线底座上。
(6)安装密封罩并用硅胶等密封材料进行密封。
1.3 人工标校存在的缺点
通过对人工标校过程的分析可以看出其存在以下缺点:
(1)需要拆卸密封罩及自整角机,其拆卸过程较为复杂,容易导致自整角机传输线路断开,经常拆卸会对部件造成不良影响,且标校完毕需对自整角机进行密封。
(2)自整角机调整后不可再将其转子转动,但在安装过程中由于人为因素而难以避免,往往造成一定角度的偏差。
(3)标校操作在装备加电情况下进行,对于装备及人员的安全存在一定影响。
(4)人员需求多,需要多人配合完成。
(5)标校过程所耗费时间较长。
针对以上所述人工标校存在的各种缺点,本文设计了一种自动标校系统,从根本上避免人工标校所存在的不足。
2 自动标校系统设计
2.1 自动标校设计原理
自动标校系统是在原来标校系统的基础上,采用软硬件结合的方法实现。即在轴角编码之后及四路并行信号输出之前,添加天线方位补偿电路板对实时方位数据进行补偿调整,具体实现方法如下:首先确定雷达天线所指方位,然后将此方位数据输入到标校软件,软件将之转化成相应的 12位二进制数送至补偿电路板,当补偿电路板收到这一数据时,表明将要完成一次标校工作,此时补偿电路板采集一次天线当前传输的方位数据(即由天线传到补偿电路板还未对其进行补偿运算的天线方位数据),并计算出其反码,在将此反码与计算机传来的方位数据相加,将结果存储到补偿电路板上 E2ROM中,称之为方位补偿数据。然后再将方位补偿数据与方位初始数据相加的结果作为补偿后的天线方位数据输出。在以后装备每次开机时方位补偿数据直接从 E2ROM中调用即可,不必再次进行标校。
由于雷达在工作过程中,需要实时对天线方位进行调整运算,为避免天线方位调整运算对监控计算机造成负担,故整个运算过程由硬件电路来完成,以保证监控计算机正常工作。自动标校系统结构如图3所示。
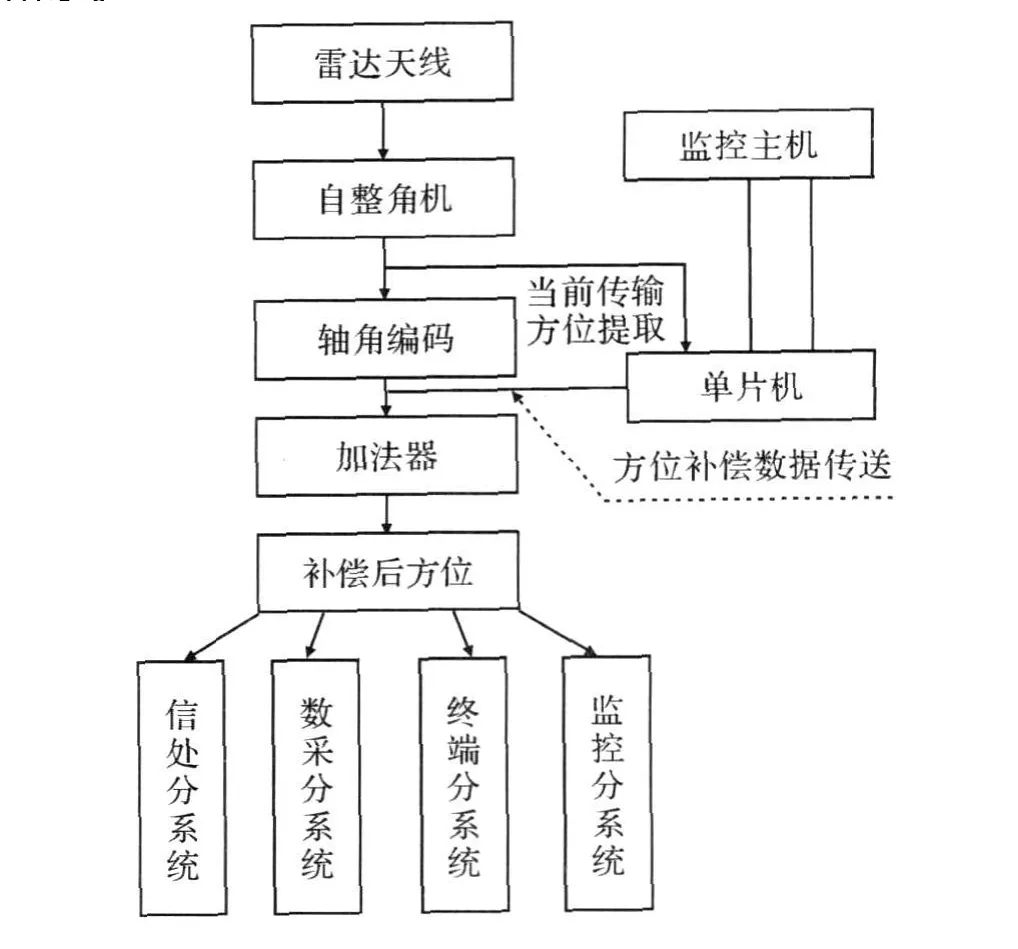
图3 自动标校系统结构
2.2 标校软件设计
当需要对雷达进行标校时,操作人员只需在标校软件输入天线实际指向方位数据,为十进制方位数,然后点击“标校”即可,由于原装备轴角编码使用 12位二进制数,所以标校软件在收到操作人员输入的方位数据时必须对其进行二进制数字量化,将其转化为相应的二进制数,然后通过计算机串口发送至补偿电路板[1]。软件结构流程如图4所示。
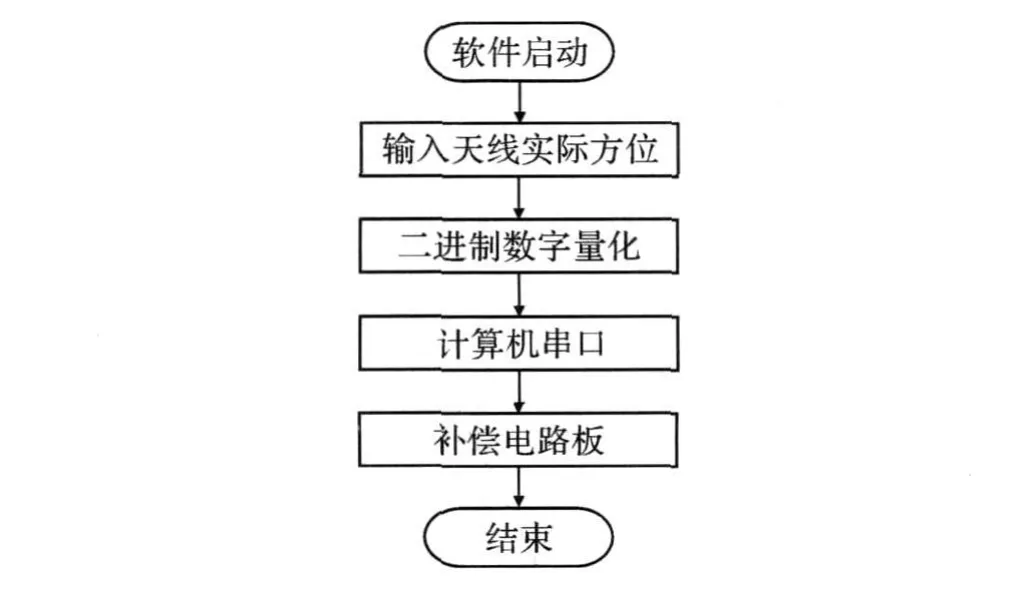
图4 软件结构流程
2.3 硬件程序设计
当补偿电路板上电时,单片机硬件程序即开始运行,首先程序进行初始化,之后单片机循环从E2ROM中读取方位补偿数据并将之输出到加法器,以便对天线初始方位进行补偿。标校软件通过单片机的串口通信中断来控制单片机的标校动作[2],当单片机产生串口中断时则接收计算机发送的数据,同时采集一次天线当前方位数据并求出其反码,然后将这两个数据的和作为方位补偿数据存入 E2ROM中,以供单片机主程序调用。程序流程图如图5所示。
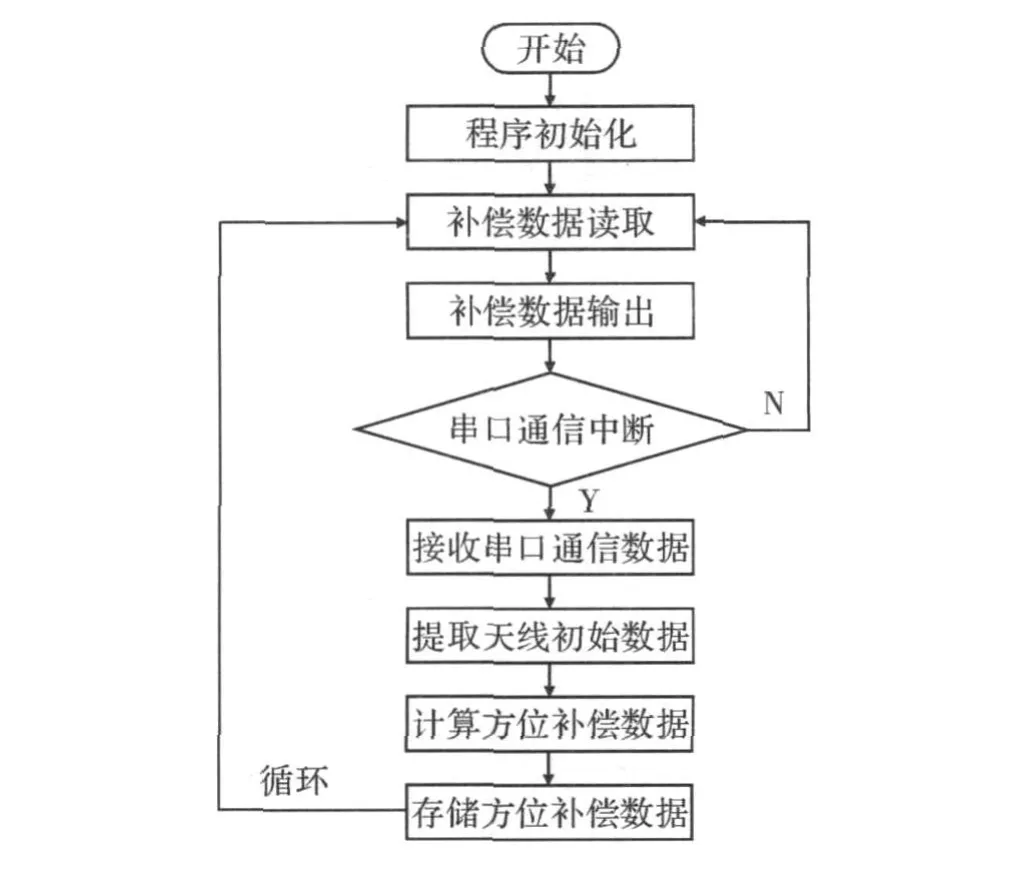
图5 硬件程序流程图
2.4 自动标校的优点
使用自动标校系统对雷达天线方位进行标校时,只需将雷达天线所指向的实际方位数据输入到标校软件进行标校即可。自动标校系统避免了人工标校的各种不足,极大的简化了天线标校工作,不必对雷达任何部件进行拆卸,保证了自整角机等部件的良好性,延长其工作寿命,整个标校过程对于人员及标校时间的需求得到相当的改善,仅需一人在短时间内即可完成天线标校工作,完全用软件控制,自动化程度高,并且标校结果准确。另外,自动标校的设计几乎不必对装备进行物理改动,只需在轴角编码中天线方位数据送出之前添加一块标校电路板即可,保证了原有装备的完好性。目前该系统已成功应用于实际装备,工作稳定可靠,效果良好,具有一定的实用价值。
3 结束语
通过对某型雷达方位人工标校过程的分析,针对存在的问题,提出了雷达方位软件控制自动标校方法,弥补了人工标校存在的不足,实现了在不需拆装雷达部件的情况下完成雷达的标校工作,降低雷达标校工作的复杂性,缩短雷达标校的工作时间,减少了雷达标校对人员的需求,提高了雷达标校的准确性及工作效率。
[1] 李现勇.V isualC++串口通信技术与工程实践[M].2版.北京:人民邮电出版社,2004.
[2] 杨文龙.单片机原理及应用[M].西安:西安电子科技大学出版社,1993.
猜你喜欢
幼儿园(2021年12期)2021-11-06
科学技术创新(2021年11期)2021-05-25
电子制作(2019年7期)2019-04-25
宇航计测技术(2018年3期)2018-09-08
资源再生(2017年4期)2017-06-15
电子制作(2017年23期)2017-02-02
中国修辞(2016年0期)2016-03-20
火控雷达技术(2016年2期)2016-02-06
中国资源综合利用(2016年10期)2016-01-22
小学生时代·大嘴英语(2015年7期)2015-11-23