基于CATIA 的某型加油车维修可达性与作业空间分析
2010-02-26 10:51张源涛马振利
装备制造技术 2010年2期
张源涛,马振利
(后勤工程学院,重庆401311)
随着现代装备科技含量的不断提高,装备造价和维修成本也不断攀升。如何在装备的生产研制阶段,就充分考虑到维修性以节省寿命周期费用,和如何对现有装备进行维修性分析,是一个亟待解决的课题。虚拟技术的发展,为装备的维修性分析提供了一种新方法,即只需要建立该装备的虚拟样机,就可以进行可靠性、维修性等分析。维修部件的可达性和维修作业空间布局的合理性,是装备维修性最基本的指标之一。可达性,是指被维修的部件可以被触及的特性,即“摸得着”。本文以某型加油车为例,提供了一种利用CATIA软件的人机模块对装备可达性、维修作业空间进行分析的新方法,实现了装备维修可达性、维修作业空间分析的虚拟化、便捷化。
1 维修部件可达性、维修作业空间分析的目的
装备维修性要求装备具有良好的可达性。可达性好,维修就会迅速、简便,而且不容易出差错,维护费用也会减少,它是维修性定性要求中最重要的一条。维修作业空间是维修过程中维修人员所处的空间,作业空间内各部件的空间距离以及空间位置设计的合理与否关系到装备维修能否舒适、方便、安全地进行,直接影响到装备的维修效率。因此有必要对装备的可达性、维修作业空间进行分析,从而改进设计,使维修操作更符合人的行动特点,减少维修人员的适应过程,使装备符合维修人员的经验、行为特征和操作想象,就能够减少操作出错,保证维修安全,提高维修效率。
2 CATIA及维修可达性、维修作业空间分析过程
CATIA是一款成熟的CAD/CAM软件,不仅拥有强大的三维造型、虚拟制造、装配分析等功能,还把人体测量学、人类工效学、人机工程学中的各种知识和理论,直接嵌入到该软件的人因工程设计和分析模块,使得在实际的维修性分析过程中,只需把人体模型直接放入所考虑的装备之中,可省去做人体模型和大量的数据测试的繁复工作。CATIA还可以快速、便捷地调整虚拟人的作业姿态,以满足不同作业姿态下的空间尺寸测定,这是其他CAD/CAM软件无法比拟的。
要进行可达性、维修作业空间分析,首先根据产品实体或者设计方案,运用虚拟设计的方法设计出产品的立体模型;然后,加入虚拟人,在CATIA中可以清晰地判定人与装备的空间关系;最后,根据人机工程学的原理,并利用CATIA的各种功能,进行维修性分析。
3 某型加油车的可达性与维修作业空间分析
首先,建立该加油车操作舱与虚拟维修人员的三维模型,如图1所示:
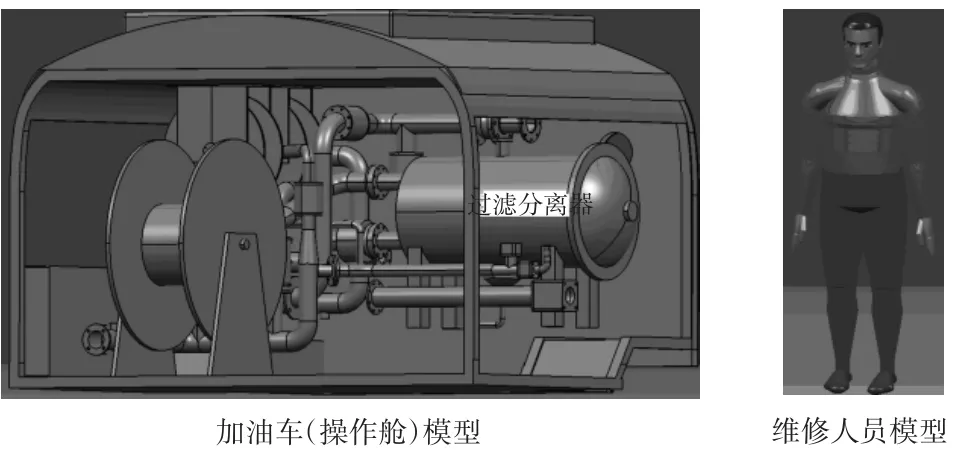
图1 加油车操作舱与虚拟维修人员模型
以该加油车过滤分离器的换件维修为例,进行可达性、维修作业空间分析。考虑到该部件的工作频率较高,当该部件出现过滤网破裂故障时,要求维修作业人员能够快速做出反应,停止装备运转,及时拆换过滤分离器,快速排除故障,故对过滤分离器的可达性、维修作业空间要求较高。
3.1 可达性分析
要进行可达性分析,首先要找出可达性分析的关键部位,选择适当的可达性分析位置,并采用适当的姿势。选择适当的位置与姿势,对于装备的可达性有至关重要的作用。不同的维修位置与姿势,可达性的结论是不同的。对于换件维修来说,维修部件可达性的好坏,主要取决于固定该部件或该部件与其他部件连接处,等关键部位的可达性的好坏。由于过滤分离器与过滤分离器进、出管路和固定支架相连接,要想实现换件维修,必须把过滤分离器从管路和支架上拆卸分离开来。所以,过滤分离器进、出管路和支架与过滤分离器的连接处,是维修作业的关键部位,也是可达性分析的关键部位。在此,只对过滤分离器进、出管路和过滤分离器的连接处,做可达性分析;支架与过滤分离器的连接处,就不赘述了。
确定了关键部位以后,对虚拟人体位置做适当的调整。通过对人体位置的多次调整,就可以确定如图2所示的位置,是过滤分离器换件维修可达性分析的首选位置。首先以蹲姿进入操作舱,尽可能的将人体模型移向连接处(如图3所示,膝盖已与部件接触,达到前移极限)。
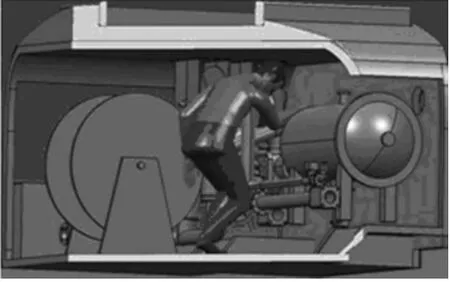
图2 维修人员最佳维修位置
图3 膝盖触及部件
维修人员上肢伸展在三维空间里的位置,往往决定维修部件可达性的好坏,CATIA能够给出上肢所能达到的所有空间位置域。打开CATIA上肢可触及功能,得到的结果如图4所示(为显示清楚,隐藏部分部件)。

图4 蹲姿进入操作舱时上肢触及范围
图5 立姿弯腰进入操作舱时上肢触及范围
从图4中可以看出,当维修人员蹲姿进行分析时,不能够接触到过滤分离器与过滤分离器进、出管路的连接处,调整维修人员的姿势,由蹲姿改为站立弯腰姿势,上肢可触及范围如图5所示。由图5可知,在位置不改变而姿势改为立姿弯腰后,过滤分离器进、出管路与过滤分离器的连接处基本可以触及。
以上分析可以得出,在加油车过滤分离器进行换件维修的情况下,维修人员在图2位置,并且以站立弯腰姿势进入操作舱,可以触及过滤分离器与进、出过滤分离器的管路接口处。以其他位置、姿势要想触及该部位较为困难。总之,该部件维修可达,但需要特定的位置与姿势,总体评价维修可达性一般。
3.2 维修作业空间分析
维修人员在进行维修作业时,人与机器设备、维修工具等所需空间的总和,叫维修作业空间。一个优良的作业空间,可以使维修人员安全可靠、舒适方便、迅速便捷地完成维修任务。大多数维修空间,都是受限作业空间,很难满足维修人员的特殊需求。比如,最大维修人员的间隙需求和最小人员的伸及需求,这些特殊需求往往与常规作业者的差别较大。
对某个特定的维修作业空间,就某个单项而言,可能不是最优的,但是应该力求在整体上达到最优,应处理好安全、经济、高效三者之间的关系,最后的设计方案,只能是考虑各方面因素的折衷方案,本文只从人机工程的角度,进行该加油车的作业空间分析。
可以明显看出,由于操作舱内部高度的限制,维修人员进入操作舱,只可以以蹲姿或者立姿弯腰屈膝姿势进入,维修人员的行动路径和动作方式,受到很大的影响,直接影响维修效率。
人体在站立时,维修作业面的高度,应该在肘高位置附近为最佳位置。男性平均肘高为1 020 mm,因此,从地面到500 mm高度之间,只适用脚作业;若采用手作业,则需弯腰,消耗体力。在500~700 mm之间,手和脚作业都不方便,所以不宜在此高度进行维修作业。在700~1 600 mm高度之间,尤其是900~1400 mm高度之间为最佳操作区。过滤分离器进行维修时,由CATIA测量工具测得作业面的高度约为633~898 mm(如图6所示)。因此,在633~700 mm之间,手脚作业都很不方便,要弯腰、屈膝,需要消耗体力,从而影响效率。而作业高度在700~900 mm之间时,可以较为正常操作。

图6 CATIA测量工具得出维修作业面大致高度
维修作业时,由于肘部的移动,小臂的运动与其相联系,实际水平作业区域比图5所示的范围要小,对于手臂较短的维修人员来说,触及维修部位可能比较困难,或者可以触及但是负荷较大,长期在这种条件下作业,容易使人产生疲劳。如果身体上侧(尤其是肩部)可以越过图8a中白色箭头区域,那么触及维修部位就会更加容易,维修也就更加方便。下面我们来分析这种办法的可行性。
该虚拟维修人员按照正常男性军人比例制作,肩宽(三角肌上两侧缘之间水平方向的最大水平方向的距离)约为430.05 mm,由CATIA的距离范围分析功能对话框中设置最小距离为430 mm,最大距离设置为800 mm,如图7所示。
进行运算分析结果,如图8所示,图8a中所示的制约人体进一步靠前的两部件之间的最小距离为339.92 mm;图8b中的白色箭头线的为小于规定的最小距离的区域,即小于肩宽的区域,表明如果人体要想更加靠近维修部位以更好及方便地维修,必然与红色区域发生干涉,即人体不能穿过该区域,也就是不能够靠前超过该区域。所以以上假设不可行。
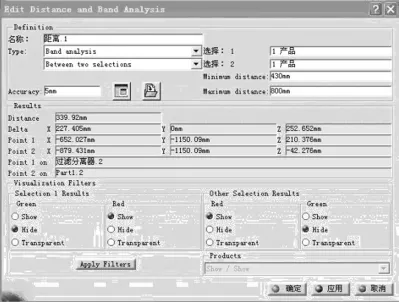
图7 CATIA距离和范围分析对话框
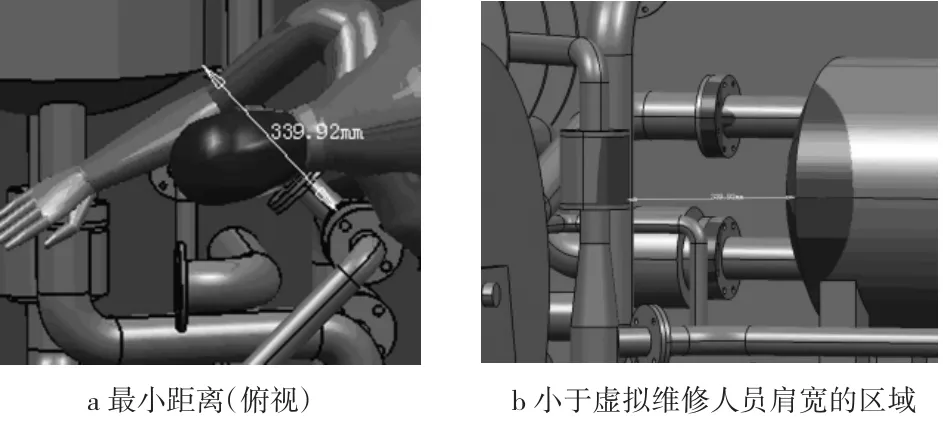
图8 CATIA距离和范围分析结果
4 结束语
本文以某型加油车维修性基本要求之一的可达性和维修作业空间为出发点,以过滤分离器的换件维修为例,提出了一种利用CATIA软件人因工程设计与分析模块进行可达性、作业空间分析的方法,并介绍了分析过程。实践证明,该方法简便、易行、成本低,是装备维修性研究的一个重要手段。
[1]郝建平,等.虚拟维修仿真理论与技术[M].北京:国防工业出版社,2008.
[2]项英华.人类工效学[M].北京:北京理工大学出版社,2008.
[3]栾宝国.汽车人机工程学三维人体模型的建立和应用[J].北京汽车,2004,(4):32-35.
[4]张峻霞,梅飞雪,赵俊芬.CATIA V5人机工程学功能及应用[J].包装工程,2005,26(3):194-196
[5]陈勇,吴国献,赵忠明.基于CATIA的人员作业仿真建模、人因分析与优化[J].系统仿真学报,2009,21(14):4540-4553.
[6]郑 午,等.人因工程设计[M].北京:化学工业出版社,2006.
[7]左春怪,杨斌宇,王晓峰,等.人机工程与造型设计[M].北京:化学工业出版社,2007.
猜你喜欢
汽车工程师(2021年11期)2021-12-21
工业加热(2021年4期)2021-05-12
湖南电力(2021年1期)2021-04-13
装备制造技术(2020年4期)2020-12-25
汽车维修与保养(2020年11期)2020-06-09
中国特种设备安全(2019年7期)2019-09-10
中国海洋平台(2019年1期)2019-05-25
民用飞机设计与研究(2019年4期)2019-05-21
制造技术与机床(2018年9期)2018-09-19
航空标准化与质量(2014年3期)2014-03-04