
地面三维激光扫描标靶中心识别算法研究
2010-04-19 03:19苏晓蓓郝刚
城市勘测 2010年3期
苏晓蓓,郝刚
(中国矿业大学环境与测绘学院,江苏徐州 221008)
地面三维激光扫描标靶中心识别算法研究
苏晓蓓∗,郝刚
(中国矿业大学环境与测绘学院,江苏徐州 221008)
地面三维激光扫描仪是通过扫描标靶中心获得点云的海量散乱点数据,其扫描标靶中心识别的精确与否直接影响了DEM和DSM建立的精度和质量。通过对已有算法的改进和滤波的处理,对大量点云数据进行了处理,得到了很好的结果,并在此基础上提出了提高标靶中心识别精度的结论。
三维激光扫描;标靶中心;算法;滤波;点云
地面三维激光扫描技术是在地面利用激光扫描装置自动、系统、快速、实时获取对象表面的三维坐标的测量技术。它是一种高精度的测量手段,中、长距离的地面激光扫描仪的单点定位精度在±2 mm~±25 mm之间。起初的激光扫描与传统的单点测量(如全站仪,GPS测量)不同,只能获取被扫对象表面成千上万个点的三维坐标,但却无法对某一指定点进行测量并精确获取其坐标。近年来,地面激光扫描使用的特定材料、特定形状的标靶来解决了这一问题。在扫描过程中,扫描仪可以在指定的视场范围内自动寻找标靶并以极高的点密度(如1.5 mm间隔)进行精确扫描处理软件可以自动提取标靶中心点坐标,从而提高了点云拼接和坐标转换的精度。因此,研究标靶中心的识别方法是非常有意义的[1]。
1 平面及球形标靶简介
标靶是一种特制的反射物,扫描部分为白色,白色对激光的反射效果好,周围是特制的蓝色隔膜,它可完全吸收蓝色激光。依据形状标靶可以分为平面标靶和球形标靶。
球形标靶可以从任何一个方向扫描而得到中心,故非常适合具有拐角的不规则物体的内部和外部扫描,而且不存在倾角问题,其缺点是无法一次扫描得到其全部表面的点云数据。本文主要讨论平面标靶中心的识别问题。标靶中心的自动识别已有文献[2]提出了3种方法(Gordon et al.,2001;Lichti et al.2000),但它们都是基于平面标靶中心是反射强度最大的点这一假设的,这种思想甚至用于标靶的设计当中,如徕卡扫描仪的标靶。实际情况是激光容易在目标中心附近形成多重反射效应,反射强度中心的数据容易受噪声污染。
图1 平面标靶的点云
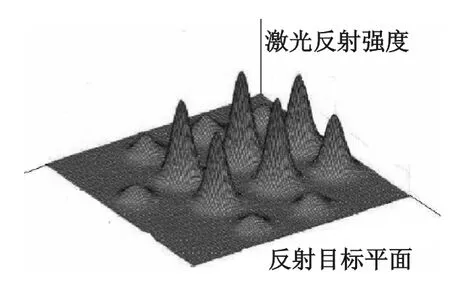
图2 多重反射效应
2 现有方法介绍
(1)简单平均法(graverg)。若认为点云数据不受噪声污染,成均匀分布,则可认为标靶中心为数据的几何中心。

(2)maxrad法。直接取反射强度最大的点。
(3)maxrad4法。取反射强度最强的4个点平均。
(4)对(1)式取加权平均,权为该点的强度Ij。
(5)fuzzypos法。首先采用模糊聚类的方法将反射分为3类,高反射强度,低反射强度,和反射强度适当。对每类求点位平均和强度平均,利用两个反射强度最大的类的点位平均求中心。图3是采用这种方法得到的分类结果。
(6)gridrad法。首先建立平面标靶的表面规则格网模型(x,y,z),再建立反射强度规则格网模型(x,y,i)然后利用两个格网的数据加权平均。图4是采用nearest最邻近插值建立的强度数据的表面模型。
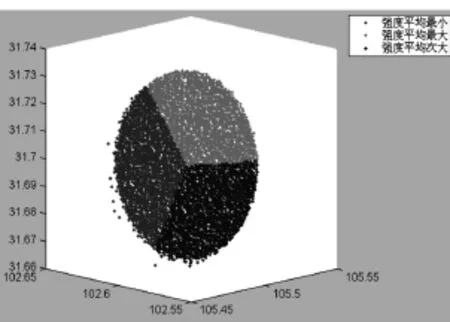
图3 模糊分类结果
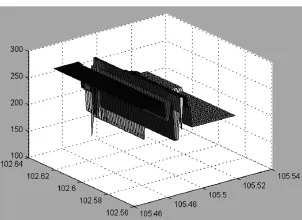
图4 最邻近差值结果
3 改进方法
在实际扫描过程中由于各种因素的影响,包括温度,压力,相对湿度,光照等的变化。激光束在传播过程中受到雾气等微粒的散射(瑞利散射),水汽,CO2或O3的吸收作用,大气折光和外界光源干涉等等。这样原本规则的平面标靶被扫描后的点云数据并非在一个平面上。要得到标靶中心必须对数据进行预处理,它包括粗差剔除和强度数据滤波,后者主要是对偶然误差处理。
(1)粗差点剔除:首先拟合出一个平面,然后求每个点(xi,yi,zi)到平面的距离。若超出某个阈值则认为是粗差。其具体算法是:
平面方程一般表达式为:

上面方程两边同时除去d,得到用法向量表示的平面形式:

平面的单位法向量为:


根据最小二乘原理实际上要求:

其中:m为观测个数,可得:n=N-1t
其中n=[nxnynz]T,且:
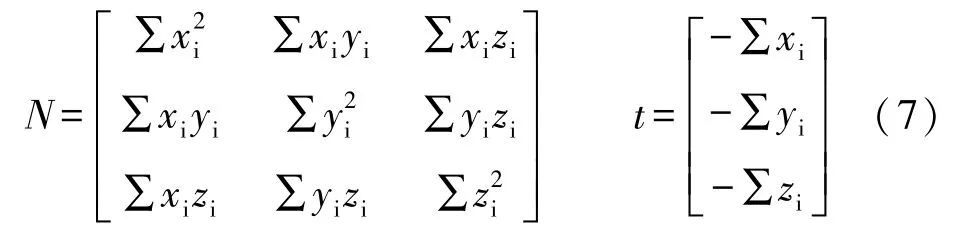
拟合误差:

其中m即为(6)式中的观测个数,S为残差平方和,即(6)式中左端的值。
求出如下值:

其中m如上所示。
(2)滤波处理
小波变换是一种有效的去除高频数据噪声的方法。其基本原理是用一族函数去表示或逼近一信号或函数,这一族函数称为小波函数系,由一基本小波函数(母小波)通过平移和伸缩构成。其具体算法可以参考相关文献[2]。
4 实验介绍
某平面标靶(如图5所示)扫描后点云共有点12 871个,扫描距离为50 m。图6为标靶点云的部分数据。
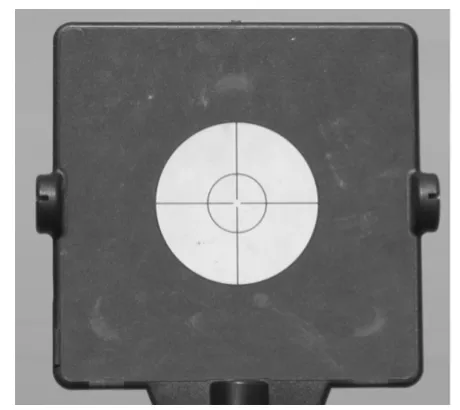
图5 实验标靶
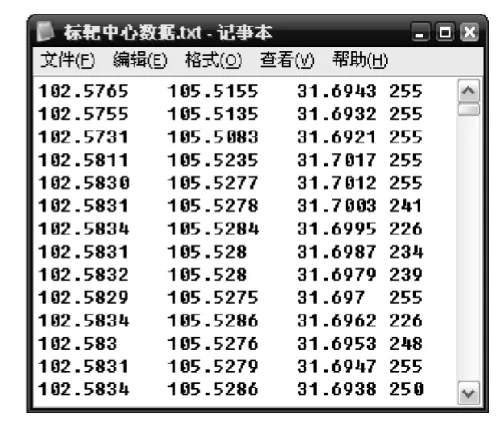
图6 标靶点云的坐标数据(部分)
经实验,当δ=3δd时,剔除点数为80个,当δ=2δd时,剔除点数为331个。滤波前后强度(即受噪声污染的强度)如图7、图8所示。
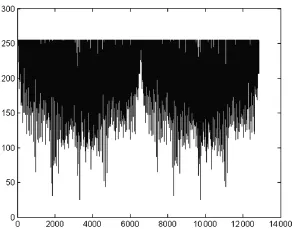
图7 受噪声污染的强度数据
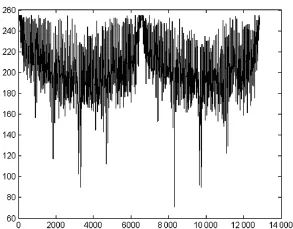
图8 交换后的强度数据
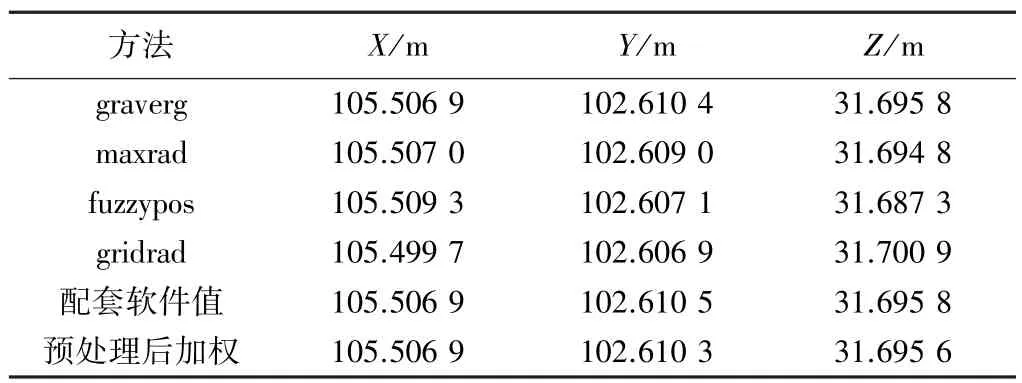
几种标靶中心计算方法 表1
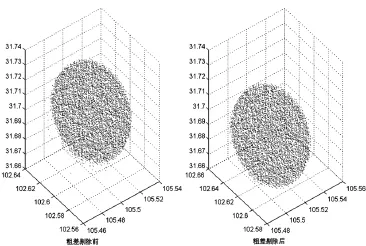
图9 粗差剔除前后的点云
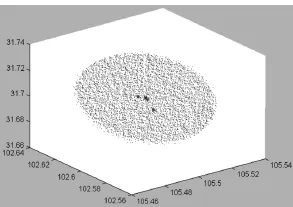
图10 几种方法所求得的标靶中心在其点云中的位置
5 结 论
由于标靶点云不可避免存在误差,应首先进行误差处理再求中心。经过粗差剔除后,可以去除标靶平面边缘的一些干扰点,和一些明显远离标靶平面上的粗差点。为了便于对比显示,将原始点云用小点形表示,将求得的标靶中心用红色星形表示,通过图10和表1可以看出graverg法、小波滤波法和粗差剔除法的结果近似,graverg法虽然简单但它适合于距离适当,分辨率和观测质量较高的点云数据,所以,采用后两种方法。
其中,在实验过程中应注意:
(1)在扫描标靶前,若是在已知点上应严格对中整平,对于平面型的标靶,如果标靶平面放置时与扫描方向有一定的倾角,而不是垂直扫描,那么标靶识别软件可能无法找到标靶的中心这时自动识别失效。另一方面,随着扫描距离变远,反射信号逐渐变弱,当距离大于一定值之后,标靶识别软件也会因为信号的衰减而无法识别标靶[3]。
(2)扫描标靶的倾角和距离要适当。由以往实验表明:在扫描倾角50°内,使用配套的标靶可以获得良好的精度,在扫描距离170 m内使用配套的标靶可以获得良好的精度[4]。
(3)在每个测站应对标靶进行扫描两次,即初始一次,迁站前一次,通过比较两次的中心差别,以检验是否受到外界干扰。
[1]L.Bornaz,F.Rinaudo,Terrestrial Laser Scanner Data Processing.L.Bornaz,F.Rinaudo,Politecnico di Torino-Dipartimento di GeorisorseTerritorio.www.isprs.org/congresses/ istanbul2004/comm5/papers/608.pdf.
[2]D.Lichti.Tests on a Three-dimensional Laser Scanning System[D].Snow School of Spatial Sciences Curtin University of Technology GPO Box U1987 Perth,Western Australia,2000. www.cage.curtin.edu.au/geogrp/WordDocs/scancal.pdf.
[3]Born,Max and Wolf,Emil.Principles of Optics:Electromagnetic Theory of Propagation,Interference and Diffraction of Light.5th ed.,Pergamon Press,1975
[4]朱凌.地面三维激光扫描标靶研究[J].激光,2008,9 (1):101~106
Research of the Target Center Identifying Method about Terrestrial 3D Laser Scanning
Su XiaoBei,Hao Gang
(College of Environment and Spatial Informatics,China University of Mining and Technology,Xuzhou 221008,China)
Terrestrial 3D laser scanning can get numerous dispersion data with scanning the center of the target.The Precision of the center of the target influence the precision and quality of the foundation of the DEM and DSM.In this paper,a large sum of data are processed with the improvement to current method and the filtered method,and we get good results.With the upper method,the conclusion about enhancing the identifying precision of the center of the target is proposed.
3D laser scanning;the center of target;method;filtering;Points Cloud
1672-8262(2010)03-68-03
P232
A
2010—01—11
苏晓蓓(1984—),女,在读硕士,主要从事于3S方面的研究工作。
地理信息工程国家测绘局重点实验室开放基金项目,塌陷区数字近景摄影测量的定位精度理论,编号:200818。
猜你喜欢
中学生数理化·高三版(2019年1期)2019-07-03
测绘工程(2018年3期)2018-03-20
试题与研究·高考数学(2016年1期)2016-10-13
肇庆学院学报(2016年5期)2016-03-11
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
测绘学报(2015年4期)2015-01-14
电子设计工程(2014年20期)2014-02-27
大地测量与地球动力学(2014年3期)2014-02-13
测绘科学与工程(2013年4期)2013-03-11
