地面中重频PD雷达探测巡航导弹性能分析*
2010-08-11 05:26雷火明余希华
舰船电子工程 2010年2期
雷火明 林 强 余希华
(空军雷达学院研究生管理大队1) 武汉 430019)(空军雷达学院陆基预警装备系2) 武汉 430019)(95025部队3) 武汉 430019)
1 引言
低空突防的巡航导弹作为现代战争的杀手锏,可对军事要地和重要目标实施有效打击,已成为战场防御方最大的威胁,使得如何探测、预警巡航导弹成为地面情报雷达必须面对的问题。巡航导弹目标雷达截面积小、飞行高度低,雷达探测时通常将受到强地(海)杂波等强无源干扰,实践表明,对于一般地面对空情报雷达,为能较好地探测低空巡航导弹,系统地杂波改善因子要达到50dB~60dB,采用传统的MTI已经很难实现,需采用杂波抑制性能更高的中重频PD体制。本文将就地面雷达采用中重频PD体制对巡航导弹目标在强杂波干扰下的探测性能进行相关分析。
2 巡航导弹目标特性
从雷达探测角度而言,巡航导弹主要特性有:
1)巡航高度低,一般为海面5~20m、平地60m、丘陵和山地100~150m,受地球曲率影响雷达需采用架高俯仰方式,雷达天线主瓣打地,使地杂波干扰增加几个数量级,强地杂波干扰将严重影响雷达的探测;
2)雷达的反射截面积小,如典型的美国战斧AGM-129A/B巡航导弹在地面雷达的常用波段L、S波段的 RCS只有 0.05m2~0.1m2,雷达探测时信号回波功率弱,目标检测困难;
3)巡航速度与普通歼击机相当或低于普通歼击机,大多数巡航导弹的巡航速度在0.5Mach~1Mach之间,地面情报雷达探测巡航导弹时采用常规的天线转速即可满足数据的需求。
综上所述,雷达探测巡航导弹能力主要取决于强杂波干扰环境中的弱小目标检测能力。
3 中重频PD体制相关问题分析
对巡航导弹探测时,地面雷达可以通过提高重频来增加回波脉冲数用于杂波多普勒处理和积累检测,当重频增大到一定程度时,雷达将出现距离模糊,此时的雷达采用的工作体制即为中重频PD体制。雷达采用中重频PD体制时可获得较高的杂波改善因子和目标积累增益,理论上有利于探测巡航导弹目标,但同时也带来了杂波重叠等问题。
3.1 改善因子计算
雷达在杂波中探测巡航导弹干扰因素由杂波和噪声组成。雷达干扰改善能力可通过信干比改善因子来分析。信干比改善因子定义为:系统输出端的信号干扰功率比除以系统输入端的信号干扰功率比。对于有信噪比增益的滤波器组系统,干扰改善因子与信杂比改善因子的关系为[2]:

其中,F为杂噪比,ISCR为信杂比改善因子,ISNR为信噪比改善因子。
杂波谱采用高斯模型,功率谱标准差有:

式中,σv与风速有关,σs与天线扫描有关,可表示为:

其中σw是风速均方根,θα是天线3dB水平波束宽度(弧度),Tscan是天线扫描速度(秒/转)。
地杂波频谱的标准偏差最大为σwG=0.32m/s,云雨杂波频谱的标准偏差最大为σwR=4m/s,最大平均运动速度一般取为25m/s[2]。假设雷达波长为30cm,天线转速为6r/min,则地杂波和云雨杂波谱中心及功率谱标准差分别为0Hz、4.36Hz和165Hz、26.67Hz。
采用切比雪夫50dB副瓣加权的FIR滤波器[3],设计是只在零频处形成深陷的单凹口滤波器组,阶数取 24点。系统改善因子的限制取为70dB,杂噪比F=106,可计算得滤波器组对地杂波、云雨杂波的信干比改善因子分别为67.83dB和54.57dB,信噪比改善因子为12.41dB。
3.2 杂波重叠问题
当地面雷达采用中重频PD体制时,由于存在距离模糊,杂波在距离上将有比较严重的重叠,故在杂波数据计算时,应考虑近区杂波的重叠影响。波重叠的次数和等效的视在距离与目标的真实距离以及脉冲重复频率有关。各模糊距离点可用下式计算:

式中,Ru是最大不模糊距离,Ra是视在(模糊)距离。总的杂波回波功率为各模糊距离点的回波功率之和。杂波重叠时的信杂比S/C应按下式计算:

式中,σt为目标雷达截面积,σck为杂波平均雷达截面积。
3.3 距离-多普勒盲区
距离-多普勒盲区问题是PD体制雷达要考虑的重要问题之一。盲区的产生主要有两方面的原因:一是发射遮挡;二是杂波重叠导致在某些距离段上信杂比严重下降以致超出系统的SCV值而无法检测。由于雷达存在距离模糊,在探测距离上可能出现多次发射遮挡,除第一个发射脉冲遮挡外,其它发射遮挡产生的盲区可以通过多重频参差,采用M/N检测,通过合理选取检测准则、优化设置各组PRF值来减小或消除盲区影响。
目前,地面雷一般都采用3PRF参差或者5PRF参差,由于重频数高有利于提高雷达探测性能,本文取5PRF参差,综合考虑检测概率和虚警概率选择3/5检测准则。在检测准则一定的情况下,减少盲区的有效方法是通过选择合理的PRF组合。文献[4]给出了地面中重频PD雷达PRF组选优的数学模型和采用遗传学算法进行优选的具体方法步骤。
3.4 解模糊问题
中重频PD体制在距离和速度上都存在模糊,因此需进行解模糊。现代雷达系统中,一般采用成组变PRF的工作模式来解距离模糊。考虑到减少解模糊对雷达PRF的限制,以便于实现最优PRF组工作,解模糊算法应采用对PRF限制少的聚类算法,滑窗相关器算法[5]是一种具有对PRF限制少和能解多目标模糊等优点的聚类解模糊算法,文献[6]中通过仿真分析对该算法在地面PD雷达距离解模糊中应用有效性进行了验证。速度解模糊是在距离解完模糊的基础上进行的,当求解完距离模糊后,对解速度模糊而言,就相当于分别对单个目标来进行解速度模糊。通常采用一维聚类算法就能很好地实现解模糊。
4 探测性能分析
通常采用在一定虚警概率条件下的检测概率大小来衡量雷达对目标的探测性能。我们可以通过不同距离上的检测概率来分析地面PD雷达在杂波干扰条件下对巡航导弹的探测性能。
4.1 PD雷达方程
在PD雷达中,被接收的回波信号经过接收机前端的变频、放大后,还要经过距离门选通、多普勒滤波器窄带滤波等处理。这些处理对信号、杂波和噪声在检波前的功率都发生了影响。影响的主要因素有[7]:发射脉冲的遮挡、回波相对于距离门的跨越、多普勒窄带滤波器对通带的影响。因此在进行PD雷达作用距离的分析时必须对一般雷达方程进行修正。考虑PD体制影响后,S/N等于1时的改进雷达距离方程为[7]:

式中,Bn为窄带滤波器所对应的等效噪声带宽;¯Dav为发射平均功率恒定时,PD雷达的距离损失系数,当脉冲宽度等于距离波门宽度时有:

式中,M为回波相邻脉冲之间所分割的邻接等宽距离波门的数目。
4.2 检测概率计算
假设各PRF上的检测概率pd及虚警概率pfa相同且相互独立,PD、PFA为一组PRF采用M/N准则时的检测概率及虚警概率为:

其中,N为总的PRF数目,M为检测所需的PRF数目,k为清晰的PRF数目。
采用3/5准则检测时,不同清晰PRF数目的检测性能如图1所示。
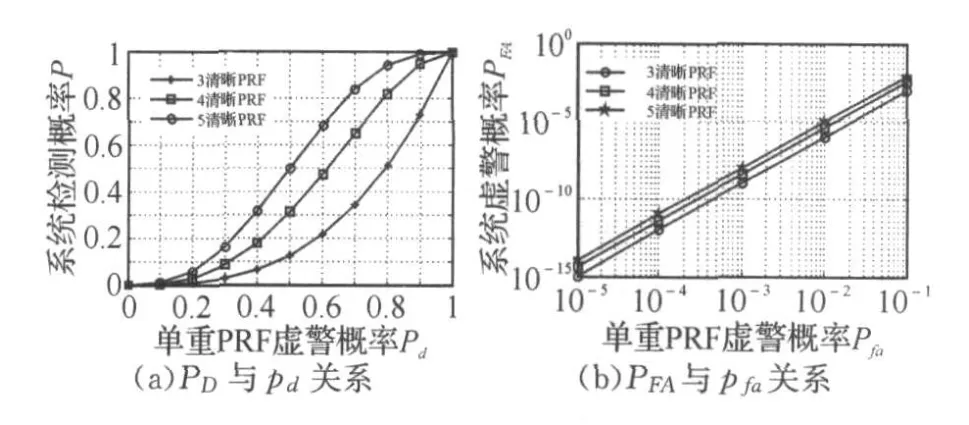
图1 3/5准则不同清晰PRF数目的检测性能
巡航导弹采用Swerling IV起伏模型,单PRF上检测概率可由下式求得[8]:

式中,γi可由下式递推计算:

式中ΓI表示Incomplete Gamma函数。
单PRF上虚警概率为:

4.3 杂波干扰下探测性能
下面结合具体参数通过仿真分析地面雷达采用PD体制时,杂波干扰下对巡航导弹目标的探测性能。仿真雷达参数取为:频率 f=1000MHz,发射功率Pt=15kW,天线增益G=31dB,发射脉宽τ=60μ s,水平波束宽度 θα=3°,系统损失 Ls=12.1dB,噪声系数 Fn=2.2dB。雷达天线转速为6r/min时,一个波束驻留时间为83.3ms。雷达扫描时还需考虑重频切换的填充时间,对于地基雷达而言,其典型的填充时间为1ms[1]。采用5重频参差取平均重频大于1600Hz,回波脉冲数n=(83.3-5)×1.6=125,即可以满足滤波器组阶数为24的要求。取多普勒范围为8000Hz,最大距离取150km,通过文献[4]的模型和方法得到3/5准则检测下的一组次优重频组为[1485Hz 1797Hz 1155Hz 2124Hz 1642Hz],平均重频为1640.6Hz,盲区图上除第一个发射脉冲遮挡外,不存在其它盲区。
取地杂波反射系数σ0=-23dB,雨杂波η=2×(降雨量4mm/h),采用 3/5准则进行检测,取单重PRF上的虚警概率pfa=,对地杂波、雨杂波的信干比改善因子取为67.83dB和54.57dB,杂波情况下,雷达对RCS=0.1m2的巡航导弹的探测性能如图2和图3。图中检测概率为该距离对应的所有距离多普勒单元检测概率平均值。

由图2和3可知,在地杂波条件下,探测巡航导弹目标,清晰区比例为89.93%,在100km之内系统发现概率都在50%以上;在地杂波加雨杂波条件下,清晰区比例为75.77%,在90km之内系统发现概率都在50%以上。对仿真的雷达参数而言采用PD体制对巡航导弹目标在强杂波环境下也能保证在90km内发现概率大于50%,但在100km以外盲区明显增加,雷达探测性能下降明显。
5 结语
通过具体雷达参数对采用中重频PD体制时巡航导弹探测性能的仿真分析可知,在距离较近的强杂波干扰环境中采用中重频PD体制能较好满足对巡航导弹探测的需求,但距离较远时受盲区的影响,探测性能明显下降。因此,地面雷达在较近距离(100km)内采用中重频PD工作模式有利于强杂波环境下巡航导弹的探测。
[1]D.Curtis Schleher.MTI and Pulsed Doppler Radar[M].Boston:Artech House,1991
[2]E.D'addio,A.Farina,F.A.Studer.Performance comparison of optimum and conventional MTI and Doppler processors[J].IEEE transactions on aerospace and electronic systems.AES-20,1984(6):707~715
[3]汪莉君,罗丰,吴顺君.一种M TD的优化设计及实际应用[J].火控雷达技术,2005(3):9~12
[4]王鹏,谭贤四,王红.基于遗传学算法地面中重频 PD雷达PRF组选择[J].现代雷达,2008,30(9):33~35
[5]张弓.PD雷达信号处理若干关键技术研究[D].南京:南京航空航天大学,2002
[6]雷火明,林强,陶雪峰,等.一种解模糊算法在地面PD体制雷达中的应用[J].空军雷达学院学报,2009,23(4):269~272
[7]毛士艺,张瑞生,徐伟武.脉冲多普勒雷达[M].北京:国防工业出版社,1990
[8]Mahafza B R,Elsherbeni A Z.Matlab Simulation for Radar Systems Design[M].CRC Press,2004
猜你喜欢
环球时报(2022-08-18)2022-08-18
趣味(数学)(2022年4期)2022-07-02
科学与信息化(2021年30期)2021-12-24
军民两用技术与产品(2021年9期)2021-11-27
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
军事文摘(2020年24期)2020-02-06
小雪花·初中高分作文(2019年2期)2019-06-27
雷达学报(2017年1期)2017-05-17
为了孩子(3~7岁)(2016年5期)2016-05-14