解析空中三角测量的作业流程研究
2010-09-08 10:49赵俊羽
东华理工大学学报(自然科学版) 2010年2期
赵俊羽
(昆明理工大学国土资源工程学院,云南昆明 650093)
解析空中三角测量的作业流程研究
赵俊羽
(昆明理工大学国土资源工程学院,云南昆明 650093)
介绍了VirtuoZo AAT软件解析空三加密的主要流程,结合本次设计的区域进行解析中三角测量加密,总结出在作业过程中提高精度和作业效率的一些方法。解析空中三角测量的作业流程主要包括测区基本参数的设置、影像列表的建立、全自动内定向、确定航带间的相对位置、自动提取连接点、连接点的编辑和PATB平差软件的使用。论述了在使用VirtuoZo AAT软件进行解析空中三角测量加密的过程以及在操作中可能出现的问题,提出通过精确刺点、多次加密等方法来解决,从而使测量精度得以改善。
解析空中三角测量;VirtuoZo AAT软件;PATB;流程
解析空中三角测量是以像片上量测的像点坐标为依据,采用严密的数学模型,按最小二乘法原理,用少量地面控制点为平差条件,在电子计算机上解求测图所需控制点的地面坐标。
VirtuoZo AAT空中三角测量是摄影测量生产中的关键步骤,它利用少量地面控制点来计算一个测区中所有影像的外方位元素和所有加密点的地面坐标。在传统作业方式下,空中三角测量是一项非常乏味和耗时的工作:选择、转刺加密点,量测加密点和控制点的像片坐标,进行区域网平差,检测并剔除粗差等等。VirtuoZo全数字摄影测量系统的影像配准算法具有可靠、快速和精确的优点。其中的AATM(自动空中三角测量)模块除半自动量测控制点之外,其他所有作业(包括内定向、选取加密点、转刺加密点、相对定向、模型连接和生成整个测区像点网)都可以自动完成。PATB光束法区域网平差程序具有高性能的粗差检测功能和高精度的平差计算功能。所以,将上述两个软件的优点结合在一起,即VirtuoZo的AATM和PATB集成后就成为功能强大的VirtuoZo AAT软件。
针对解析空中三角测量作业流程中存在的一些问题,笔者提出一些更简便的方法,进一步提高内业加密速度、加密精度,使其所生成的高质量的航片及其副产品应用于更多领域及前沿产品。
1 解析空中三角测量作业流程
1.1 准备数据
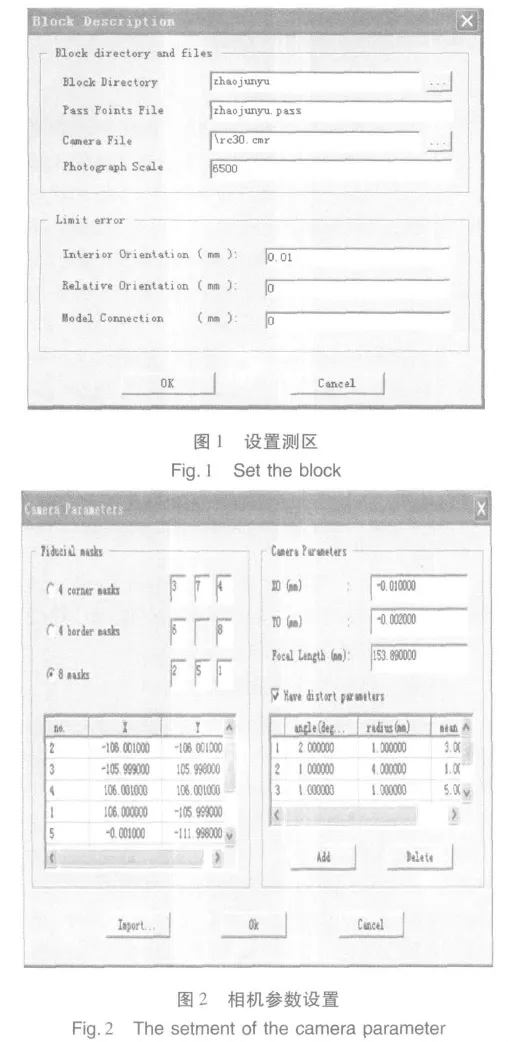
1)设置参数。在 VirtuoZo系统中,测区(Block)的概念可以理解为一个区域,也可以是一个图幅范围内的所有像对,甚至只是一个立体像对。首先要建立一个测区,如图1所示。
主目录。输入测区所在的目录。此项在测区建立后变灰,用户不能再进行修改(王佩军等,2005)。
控制点文件。输入控制点文件名。可直接输入控制点文件名,或单击文本框右侧的文件查找按钮,选择已建立的当前测区的控制点文件。其文件格式是:文件名.pas。
相机参数。图2左部框标主要有三种情况:4个角框标,4个边框标和8个框标。以4角框标为例,当用户选中此项时,右方四个角上的文本框中的数字即可编辑,下面的列表中的框标名也将与之相对应,单击列表中的任意栏即进入编辑状态,可输入相应的框标值。最后一列(enable)用于设定该框标是否参与内定向,“1”表示参与内定向,“0”表示不参与内定向。图2右部对应的编辑栏中填入相应的像主点横坐标值。对应的编辑栏中填入相应的像主点纵坐标值。Focal Length对应的编辑栏中填入相机的主距(常庆瑞等,2003)。
2)输入外业控制点。当前的控制点文件格式是pas。表格输入数据。用鼠标选中某单元,即可直接输入或修改数据。其中 ID表示控制点的点号,X,Y,Z 表示控制点的 X,Y,Z 地面坐标(本系统采用右手系,向东为X轴,向北为Y轴)。
(3)影像格式转换。
(4)建立测区影像列表。图3中Strip为当前航线的航带号,单击箭头进行选择。
Group-no将当前的航带分到某一组中,缺省情况下,测区中所有航线的组号都为1,当测区中存在交叉航带时才需要分组。航线的组号设置是专门为解决交叉航线设置的。航线之间的航线偏移量的确定与普通航线之间的偏移量的确定是不同的(冯文灏,2004)。
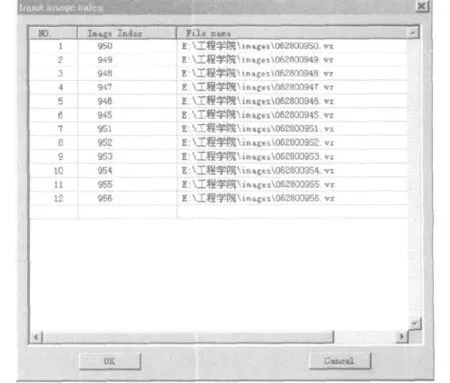
图3 影像列表Fig.3 Image list
1.2 自动内定向
内定向是数字摄影测量的第一步,数字影像以“扫面坐标系O-I-J”为基准,即像素的位置是由它所在的行号I和列号J来确定的,它与像片本身的像坐标系o-x-y是不一致的(张祖勋等,1997)。
内定向的目的是确定扫描坐标系和像片坐标系之间的关系以及数字影像可能存在的变形,数字影像的变形主要是在影像数字化过程中产生的,而且主要是仿射变形。因此扫面坐标系和像片坐标系之间的关系可以用下述关系式表示:
1.3 确定航线间的偏移量
为了在航线间自动转点,程序需要知道航线之间的相互关系,航线间的偏移量就是用来确定航线之间的相互关系的。通常,确定航向之间的相互关系,只需在相邻的航向之间人工量测数个同名点,这些点称之为航线间偏移点。在普通航线之间和不同的航线组之间,对航线间偏移点的数量有不同的要求(朱肇光等,1994):①对于两条普通航线,基本要求为在航线的头尾各量测一个点,当航线比较长时,可以在航线中间再均匀的量测一个或多个点;②对于不同的航线组,基本要求为在两个航线组的公共区域内,人工至少量测3个偏移点,而且要求这三个点不要分布在一条直线上(李德仁等,1994)。
1.4 空中三角测量自动转点
自动转点过程是一个非常复杂的过程,为了保证程序的正常运行,转点过程记录了大量的中间参数文件,并对转点结果作了相应的备份。在测区目录下,存放参数文件的目录主要有四个:Relative子目录,Backup子目录,Work子目录和Pyramid子目录①JX4全数字摄影测量工作站操作手册[Z].http://www.jx4.com.2001.。分别记录了模型的相对定向结果,单航线连接后每张影像的外方位元素,航线连接后每张影像的外方位元素,测区中每一张影像对应的金字塔影像。其中Backup子目录在自动挑点结束以后就没有了,可以删除,空三加密后Pyramid子目录中的金字塔影像也可以删除。因此我们只需要详细介绍Relative子目录和Work子目录中的参数文件内容②VirtuoZo AAT适普软件工作手册[Z].http://www.supresoft.com.1998.。
2 空中三角测量加密
2.1 连接点的编辑
(1)增加连接点。增加连接点的时候要注意按照外业实测的控制点的具体位置加点。
(2)编辑连接点。点号显示在窗口的最上方,在点号下方显示了该点的三张同名影像,在每张影像的下方标注上相应的影像名,绿色的影像名代表该影像是基准影像,其他非基准影像的文件名是红色的(图4)。
2.2 PATB 的使用
在连接点编辑完成之后,要进行PATB平差进算。若Virtuozo AAT软件之前没有安装PATB软件,请先安装此软件。在安装PATB的时候,也许会出现license can not be finded等的错误信息,其原因是没有正确的安装PATB或在安装的时候少装了某些文件,经过反复检查,最终查出原因是PATB软件的安装许可证没有装,只需把PATB的许可证拷到VirtuoZo AAT文件夹、VirtuoZo AAT文件夹的bin子文件夹和PATB文件夹即可解决上述问题。PATB软件可以正常使用。
3 出现的问题及解决方法
3.1 设置参数时出现的问题
(1)如果直接在VirtuoZo-AAT软件中设置参数,会在设置控制点文件时出现错误提示致使无法进行以后的工作。所以在VirtuoZo V3.2里的设置测区里进行设置依次设置控制点文件夹、加密点文件夹、摄影比例尺。由于初次接触此软件经常会在Import Images的设置时会出现错误,此项的正确设置应该输入所建立的测区目录里而不是子目录里。
(2)在建立相机文件时,应该注意相机文件中的焦距及坐标的输入,其中输入时不能出现空格及其他符号。
(3)在输入外业控制点的时候,可以一个个的输入,也可以直接打开控制点文件全部直接导入,在导入的时候有可能出现x,y坐标导入相反,致使后面不能生成模型。
(4)在建立影像列表,添加影像的时候,添加影像的顺序颠倒使模型连接的时候出现错误。模型之间无法正常连接,出现孤立的模型。
3.2 流程中出现的错误及解决办法
(1)建立框标模板。内定向之前必须建立框标模板,以确保以后可持续内定向。如果不进行框标的建立就会导致没有足够的框标进行内定向。在内定向的时候出现“×”号表示内定向精度很差或自动内定向失败,必须人工交互处理。通常出现这种情况时采用微调各个框标的位置,使其略为偏离框标,使内定向中误差满足规定的要求。这种“凑成果”是很危险的,因为关系到从扫描坐标系到像片坐标系变换的精度,会给最后的平差结果带来严重的系统误差,从而影响平差的精度。
(2)内定向出现的错误。相对定向的结果是建立立体模型,其精度对整个作业过程影响极大。好的相对定向结果会带来好的定向结果,相对成功率高,测图时没有视差,立体感好,因而要高度重视相对定向。相对定向既可自动进行,也可采用手动完成。若相对定向结果点数少,可能有以下几个方面的原因:①左右像片顺序是否反了;②内定向对原始影像的扫描方向是否安置正确;③重叠度、地区类输入是否有误;④相机文件、特别是焦距是否有误。
图4 连接点的编辑Fig.4 The connection point of editing
相对定向既可自动进行,也可手动完成。相对定向一般采用自动方式,仅在特殊地形相关匹配点少于6个的情况下才采用手动完成。核线重采样主要是恢复原始影像。相对定向完成后就可以建立一个没有上下视差的理想像对,绝对定向,自动获取DEM及向量测图都将在核线影像对上完成。由于是立体相对作业,只在重叠范围内作核线纠正,所以核线影像大约为原始影像的65%。在摄影测量中,相对定向所建立的立体模型常处在暂时的或过渡性的模型坐标系中,而且比例尺也是任意的。
(3)确定航线偏移量。确定航线偏移量是为了确定两条或多条航线之间的相互关系,在量测同名像点时必须精确量测,否则会影响以后的转点及平差精度。
(4)自动转点的错误。在自动转点的过程中,模型连接时出现错误。第一类是模型连接完全失败,此时模型连接的中误差为RMS=1000;第二类是模型连接中误差过大,超过了程序缺省的模型连接限差。
3.3 编辑连接点时出现的错误
(1)在添加连接点的时候,以一张像片为基准,进行加点,之后应该采用手动匹配,如果利用自动匹配,可能会因为预选点在实地不存在而引起误差,导致在其他的影像中并不存在此连接点。
(2)在加点的时候,尤其是在地面上无明显标志的时候。此点有可能选在平房的房角或路灯等有厚度的物体上,此时内业加点切点时。如特别是在房角上加点要注意房角的外侧还是里侧。因为如果内业加的点与外业实测点的位置不一致会导致最后平差计算的时候模型扭曲,点位不在所测的实际位置。
(3)连接点的编辑错误。在做内业与外业的时候一定要同步,否则外业测完的控制点位置。最终致使外业所测的点位与内业加点的点位不一致,致使平差计算误差较大,模型扭曲,影响加密点的坐标位置。
(4)未生成加密点文件。在进行手动加点的时候,不应该直接交换编辑里的加点。而应该先设置手动加点,否则会在加点完成之后,并不产生加密点文件,或者产生部分加密点文件,在加密点文件里面只有多加点的坐标,却没有自动生成加密点坐标。
4 结束语
经过以上对解析空中三角测量作业流程的研究得出以下一些有意义的结论:
(1)在进行外业选点之前,应尽可能在室内进行预选点,而且要在计算机上进行,可以同时看到多张像片之间的影像关系,以便于外业实地选点,并有利于大量减少外业工作。
(2)在输入控制点的时候,一种比较简洁的方法是把整个控制点文件直接添加到列表框中,可以减少内业的操作步骤。
(3)在建立影像列表时,应当注意添加影像的顺序,必须按航带的飞行顺序,避免平差计算后出现模型扭曲。
(4)在解析空三加密的过程中,尤其是在加点的时候会在航测像片上加点,此时用光标切点必须严格切点。如在房子的房角切点时,因为房子是有厚度的,一定要和外业实测的点位相吻合。如在切路灯的时候一定要切在路灯的顶部,不要切在路灯的根部,因为根部的点位坐标是不同的,会影响加密精度。
常庆瑞,蒋平安,周勇,申广辉,等.2003.遥感技术导论[M].北京:科学出版社.
冯文灏.2004.工业测量[M].武汉:武汉大学出版社.
李德仁,金为铣,尤兼善,等.1994.基础摄影测量学[M].北京:测绘出版社.
王佩军,徐亚明.2005.摄影测量学[M].武汉:武汉大学出版社.
张祖勋,张剑清.1997.数字摄影测量学[M].武汉:武汉大学出版社.
朱肇光,孙护,翠炳光,等.1994.摄影测量学[M].北京:测绘出版社.
Analytical Aerotriangulation-engineering Research
ZHAO Jun-yu
(Faculty of Land Resource Engineering,Kunming University of Science and Technology,Kunming,YN 650093,China)
This paper is to study the processes of Analytical aerotriangulation.Combining the territory of designing in this paper of photogrammetry-based theory of knowledge is to the air encryption.Then it introducts the major process of the air triangulation analytical in the VirtuoZo AAT software and its principal.Meanwile it sums up some ways to improve the accuracy of actual operation and using the VirtuoZo AAT sofftware to the air encryption.Analysis of aerial triangulation processes are very important,which contains the basic parameters of the test zone settings,images of the establishment of the list,with automatic orientation,established with flights between the relative position,automatically extract connection point,the connection point of editing and the use of PATB.This article discusses the use of analytical software VirtuoZo AAT air encryption process and the possible problems,through the precise point,multiple stab encryption and other methods to solve the above question.So we put forward some useful proposals.
analytical aerial triangulation;VirtuoZo AAT software;PATB;flow
P231.4
A
1674-3504(2010)02-178-05
10.3969/j.issn.1674-3504.2010.02.012
2009-03-04
赵俊羽(1985—),女,硕士研究生,主要从事土地资源管理。E-mail:zhaojunyu1986@163.com
猜你喜欢
科技创新与品牌(2022年4期)2022-05-08
建材发展导向(2021年2期)2021-03-02
西部交通科技(2021年9期)2021-01-11
西部资源(2018年1期)2018-11-01
新课程·小学(2017年8期)2017-09-20
建筑建材装饰(2017年6期)2017-07-04
教育教学论坛(2017年26期)2017-06-19
职工法律天地·下半月(2016年3期)2017-05-23
IT经理世界(2017年4期)2017-03-25
求知导刊(2016年5期)2016-03-19