无线移动机器人及运动监测系统的设计
2010-09-12 03:22李二钢姚舜才祖静
电子测试 2010年10期
李二钢,姚舜才,祖静
(中北大学仪器科学与动态测试教育部重点实验室,山西 太原 030051)
0 引言
移动机器人由于其在各行业广阔的应用前景,已经成为机器人研究领域的一个重要分支,其移动方式可以有轮式、履带式、腿式、推进式等等。其中轮式机器人因具有结构简单、成本低等特点尤为受到青睐。在军用、危险操作和服务业等场合,需要机器人通过无线通讯接收控制命令,以期望的速度、方向和轨迹灵活的移动。计算机的串口通过CC2430无线芯片收发信号,在机器人上也采用一片CC2430芯片作为射频通信端。在机器人上MSP430单片机通过调节输出PWM波控制两路直流电机,用MSP430片内ADC采集3路加速度信号和1路角速度信号。
1 系统构成
系统主要由上位机、无线通信模块和下位机组成。上位PC根据任务、环境等要求发出控制机器人的命令同时上位机也会定时的接收下位机发来的小车运动状态信息。这些命令和运动状态都是通过CC2430加CC2591射频增益放大芯片按照RS232工业标准经过无线通信模块收发的。下位机也是通过CC2430加CC2591射频增益芯片接受上位机命令和发送机器人运动状态信息。机器人端用MSP430单片机输出两路PWM波控制两路直流电机,两个光电编码盘实时的反馈双轮转速给MSP430单片机,并且通过片内的4路A/D模块采集3路加速度信号和1路加速度信号。 系统框图如图1所示。

图1 系统框图
2 硬件设计
无线通信模块选用CC2430芯片。
系统选择TI公司的MSP430F1611单片机作为系统的MCU。
MSP430片内的TimerB可以独立输出两路PW M信号经过一片L298驱动两路直流电机,最大电流可达4A。直流电机的盘码为100P/R,电机减速器的减速比为14:1;两块7.5V的电池串联作为电源,同时经过7805输出5V电压、7809输出9V电压和LP2987输出3.3V电压。
TB0、TB1管脚输出两路PWM信号,TB0管脚连L298的ENA管脚,P5.0和P5.1管脚分别连L298的INPUT1和INPUT2管脚,TB1管脚连L298的ENB管脚,P5.2和P5.3管脚分别连L298的INPUT3和INPUT4管脚。其中TB0、TB1管脚输出两路PWM波,用于控制电机的转速;P5.0和P5.1,P5.2和P5.3管脚管脚用于控制电机A和B的正反转。TimerA的两个捕获端口CA0和CA1管脚接两路码盘脉冲从而获得电机转速。A0,A1,A2,A3作为ADC的输入端,A2,A1,A0分别连三维加速度传感器MMA7260的X,Y,Z方向低通滤波后的输出信号。A3管脚用于采集机器人角速度与陀螺仪传感器ENC-03MB输出信号相连。机器人硬件电路图如图2所示。

图2 机器人硬件电路图
用一个CC2430加CC2591电路作为无线收发端。CC2430的RX和TX管脚通过MAX232与上位机的串口相连,下位机也是一个CC2430加CC2591电路作为无线收发端,CC2430的RX和TX管脚直接与MSP430单片机TX和RX相连,使用Z-STACK平台配置CC2430形成一个无线透明数据传输模块。上位机的CC2430模块的功能设置为协调器,机器人上的CC2430设置成路由器,这样机器人既可以收发信号又可以作为中继节点,便于多机器人组网。
3 软件的设计
3.1 上位机软件的设计
上位机PC软件负责控制小车运动,在WINDOWS环境下用VC6.0编写上位机控制程序。编写操作界面绘制前进,后退,左,右,停止,一档,两档,三档按钮。可以用鼠标进行点击控制也可以用键盘的上,下,左,右,P,A,S,D键进行操作控制。绘制对话框用于显示当前机器人的运动状态。包括当前加速度、速度、路程和转过的角度。
3.2 下位机软件的设计
机器人上的MSP430单片机程序包括电机控制部分和运动参数状态采集部分。运动参数的获取的通过采集和计算加速度传感器的加速度值、码盘的转速值和陀螺仪的角速度值的。小车的速度可以通过计算码盘返回值获得,机器人转过角度是通过将采集到的角速度信号在单片机内进行一次数字积分计算得到。程序流程图如图3所示。

图3 程序流程图

电机调节子程序流程图如图4所示。
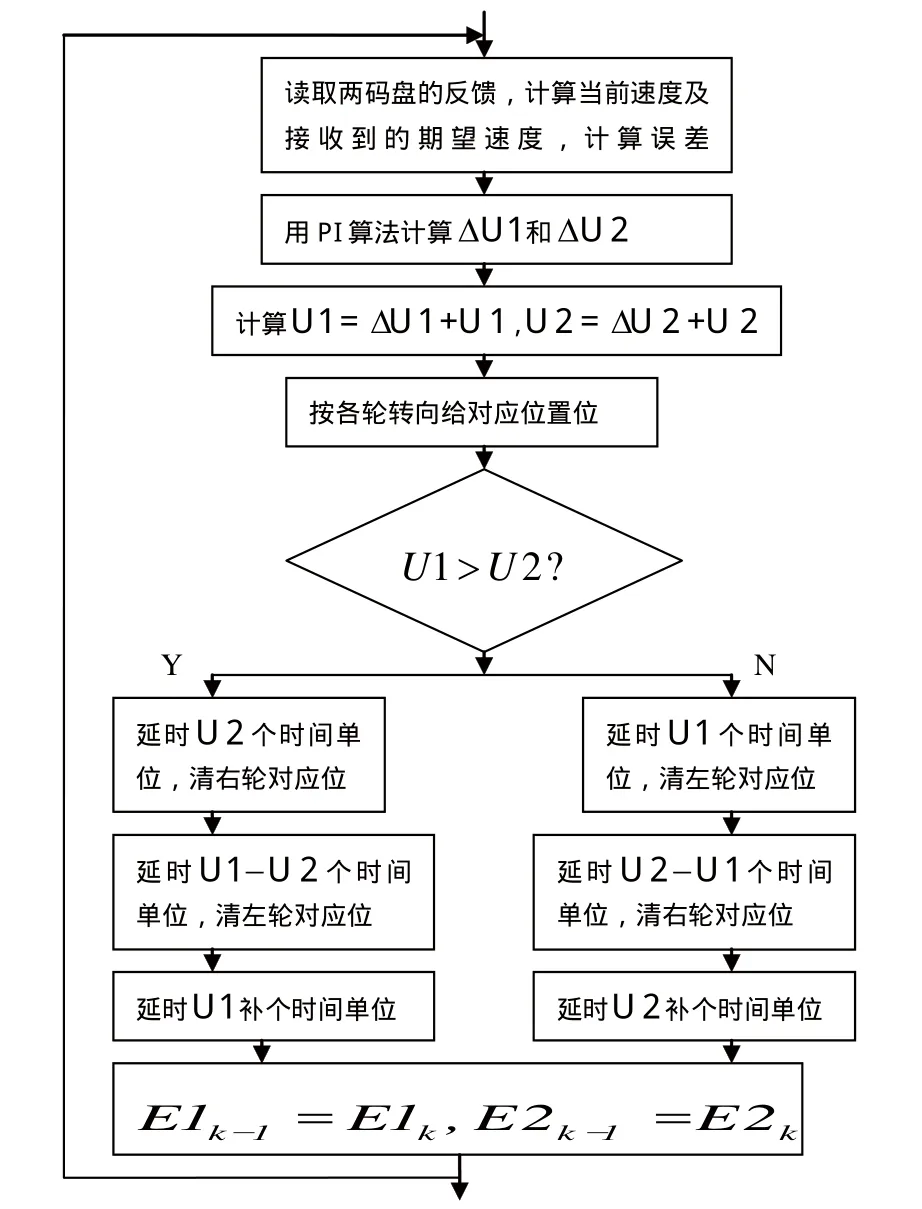
图4 电机调节子程序流程图
4 实验及结论
图6是机器人小车原地旋转运动时X向的加速度曲线。在这个机器人性能测试的实验中我们在Windows XP环境下用DELPHI编写的采集测试界面进行实验室数据的采集。图5的X轴的表示加速度值单位为0.1g,Y轴是时间轴单位是ms.可以清楚的看出机器人小车在0.7s突然由静止状态开始原地旋转运动,机器人X向的加速度突然由0上升至1.9g,然后机器人小车以这个恒定速度旋转;到3.3s的时候,机器人又突然加速旋转,从曲线可以看出X向的加速度由1.9g升至4.0g,然后以这样的旋转速度保持下去。

图5 X向加速度曲线
Zigbee移动机器人结构简单,CC2430芯片完成通信功能,MSP430单片机片内资源得到充分利用,所设计的机器人可以灵活移动,稍加扩充可以应用到各种任务中。比如我们可以在机器人上安装专门的传感器通过上位机决策实现自主导航。在机器人的工作环境中安装更多的路由节点可以扩大机器人的活动范围,也可以用多个Zigbee机器人并利用Zigbee自组网的功能,实现多机器人的协同工作。目前我们已经将该机器人用于智能控制和环境监测等研究中。
[1]张文志,吕恬生 .无线两轮机器人小车控制系统的设计[J].机械与电子, 2003(02),25 -27.
[2]朱磊磊, 陈军.轮式移动机器人研究综述[J].机床与液压 ,2009(08) .
[3]岁丰.带差速传动装置的轮式机器人的模拟和运动控制[J].管理科学文摘 , 1997, (06) .
[4]高守玮,吴灿阳 .ZIGBEE技术实践教程[M],北京:北京航空航天大学出版社, 2009.
[5]Flex Wang.无刷直流电机与控制模块安规认证[J].电子质量 , 2008,(11) .
[6]符秀辉, 欧阳淑丽.一类轮式机器人的水平姿势控制[J].机器人技术与应用 , 2004 (02) .
[7]黄维通,鲁明羽.Visual C++程序设计教程[M].北京;清华大学出版社 , 2005.
[8]高峻峣.轮式机器人模糊神经网络建模与模糊遗传PID转向控制的研究[J].计算机测量与控制 , 2003,(05).
猜你喜欢
大电机技术(2022年5期)2022-11-17
车迷(2018年12期)2018-07-26
电子制作(2017年1期)2017-05-17
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
制造业自动化(2016年8期)2016-09-12
电子产品可靠性与环境试验(2016年6期)2016-05-17
学习月刊(2015年3期)2015-07-09
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01