
基于直流伺服系统的模糊自适应控制应用
2010-11-05 06:42邰晶王忠庆
电子测试 2010年1期
邰晶 ,王忠庆
(中北大学,山西省 太原 030051)
0 引言
伺服系统是构成自动化体系的基本环节之一,它是由若干元件和部件组成的、具有功率放大作用的一种自动化控制系统,它广泛应用于机械制造、冶金、运输、国防等各个领域,它的输出量总是相当精确地跟随输入量的变化而变化,通过模糊滑模控制估算无刷直流伺服系统的负载扰动,目前高精度伺服系统仍有不少技术问题亟待解决,并使输入与输出之间的偏差不超过允许的误差范围。无刷直流电机调速系统具有时变、非线性、强耦合等特征,相比传统的控制策略虽然算法简单、快速性好、控制精度高,但在被控对象数学模型不确定或为非线性时,通常较难满足系统要求的静、动态性能指标,因此利用MATLAB的Simulink动态系统仿真工具,对BLDC控制系统进行数字仿真, 建立可以大大加快BLDC驱动系统的开发速度。
1 无刷直流电机的数学模型
1.1 电压平衡方程
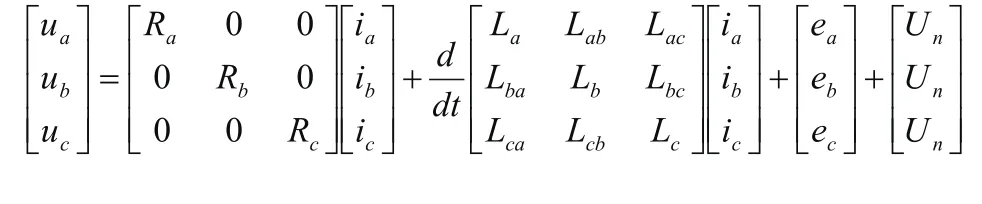
由于无刷直流电机的反电势是梯形波,绕组间互感是非线性的,这里直接采用abc三相来建立模型。仍然以三相无刷直流电动机星形连接两相导通式为例,分析电机运行过程中的数学模型和电磁转矩等特性。先使三相绕组完全对称,气隙磁场为方波,定子电流、转子磁场分布皆对称;忽略齿槽、换向过程和电枢反应等的影响;电枢绕组在定子内表面均匀连续分布;磁路不饱和,不计涡流和磁滞损耗。
无刷直流电动机的三相绕组电压平衡方程为:

1.2 电磁转矩方程
无刷直流电动机的电磁转矩是由定子绕组中的电流与转子磁钢产生的磁场相互作用产生的。定子绕组产生的电磁转矩表达式为:

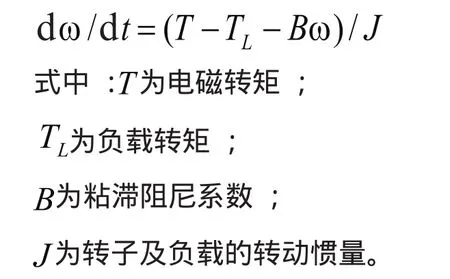
1.3 电机运动方程
2 模糊PID控制器的设计与实现
PID控制器实现对系统的控制,模糊推理系统以误差 和误差变化率 作为输入,采用模糊推理方法对PID参数进行在线整定,以满足不同的误差 和误差变化 对控制器参数的不同要求,而使被控对象具有良好的动、静态性能。根据图1系统输出曲线,当输出响应开始处于曲线的第Ⅰ阶段时,较大,为了加快系统的响应速度,并防止因开始时的瞬间变大,可能会引起的微分溢出,应取较大的和较小的。另外为防止积分饱和,避免系统响应出现较大的超调,此时应去掉积分作用,取。在响应曲线的第Ⅱ阶段,值中等大小,为了使系统响应得超调量减小和保证一定的响应速度,应取较小的Kp,且Ki和Kd的数值大小要适中。第Ⅲ阶段, 较小,为了使系统具有良好的稳态性能,应增大Kp和Ki的数值,同时为避免输出响应在设定值附近的振荡,并考虑系统的抗干扰性能,应适当地选取 Kd,其原则是:当 值较小时,Kd取大一些;当 值较大时,Kd取较小的数值,通常Kd为中等大小。
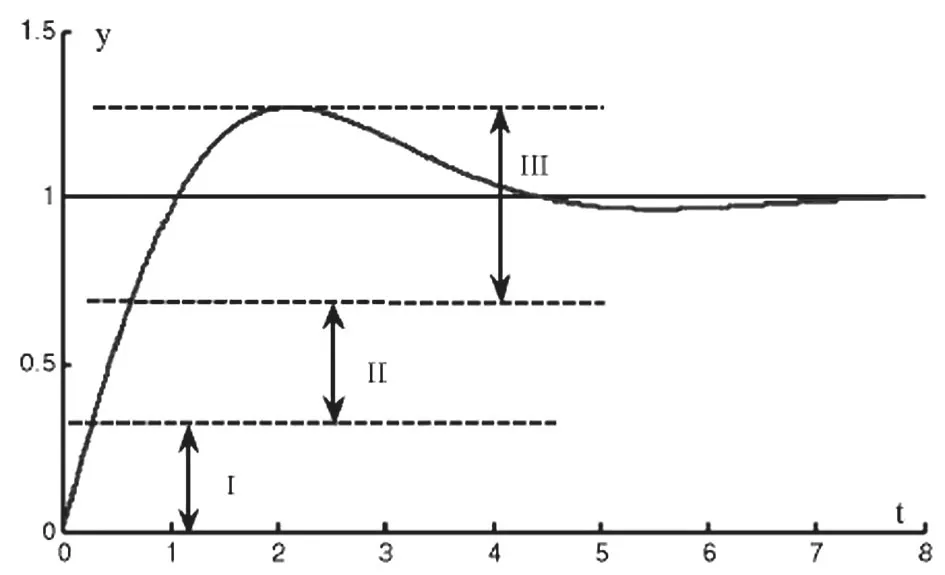
图1 系统输出响应曲线
在MATLAB/Simulink环境下,分别建立了模糊控制器和PID控制器,将模糊控制器和PID控制器连在一起构成了模糊PID控制器,如图2所示。

图2 模糊PID控制器simulink模块图
在模糊控制区域中,如果模糊环节的输入维数的增加会增加其推理规则数,提高计算复杂度,使得控制器的反应速度下降,从而会影响系统性能。模糊控制环节输入信号 与反馈输出信号 的基本论域均定义为(-3,3),其中偏差其模糊集合为7个分别为{NB, NM, NS, ZO, PS,PM,PB }, 其含义依次为:负大,负中,负小,零,正小,正中,正大。经解模糊化:
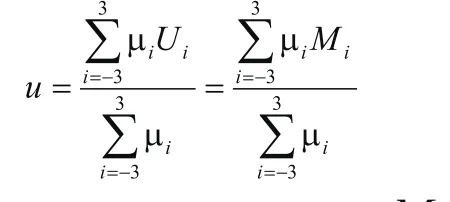
式中 为输入变量, 为模糊集的隶属度函数的中心点。输出量Kp,Ki和Kd的基本论域分别为( - 013, 013),( - 0106, 0106) 和 ( - 3,3),隶属函数曲线形状有多种,如梯形、钟形、三角形等。在模糊逻辑工具箱的隶属度函数编辑器中,选择输入量E(K),EC(K)隶属函数为高斯型,输出Kp,Ki和Kd的隶属函数为三角形如图3和4所示。
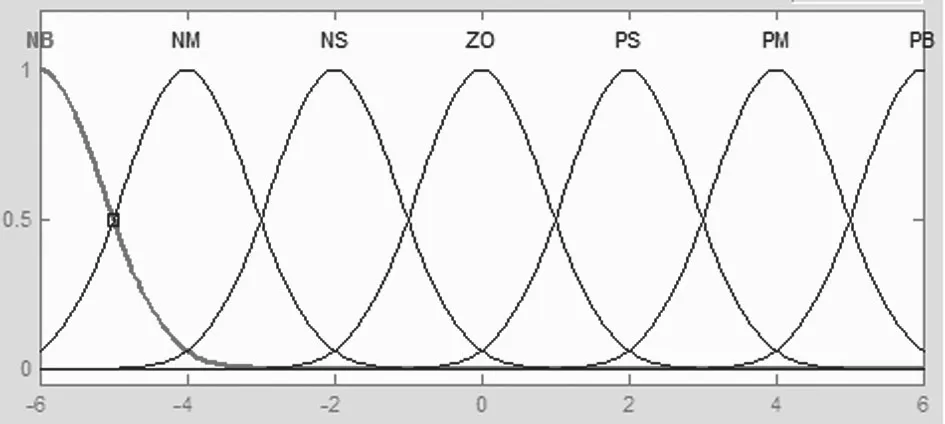
图3 及 隶属度函数

图4 Kp、Ki和Kd隶属度函数
3 仿真实验
本文基于MATLAB/Simulink建立了BLDC控制系统的仿真模型,并对该模型进行了BLDC双闭环控制系统的仿真。仿真中,BLDC参数设置为:定子相绕组电阻R=1Ω,定子相绕组自感 =0.02H,互感 =-0.0061H,转动惯量=0.005 ,阻尼系数=0.0002,反电动势系数k=0.06额定转速=1000 ,极对数=1,220V直流电源供电。为了验证所设计的BLDC控制系统仿真模型的静、动态性能,系统空载起动,待进入稳态后,在t=0.2s时突加负载TL=1N·m,在t=0.5s时又突然撤销负载。
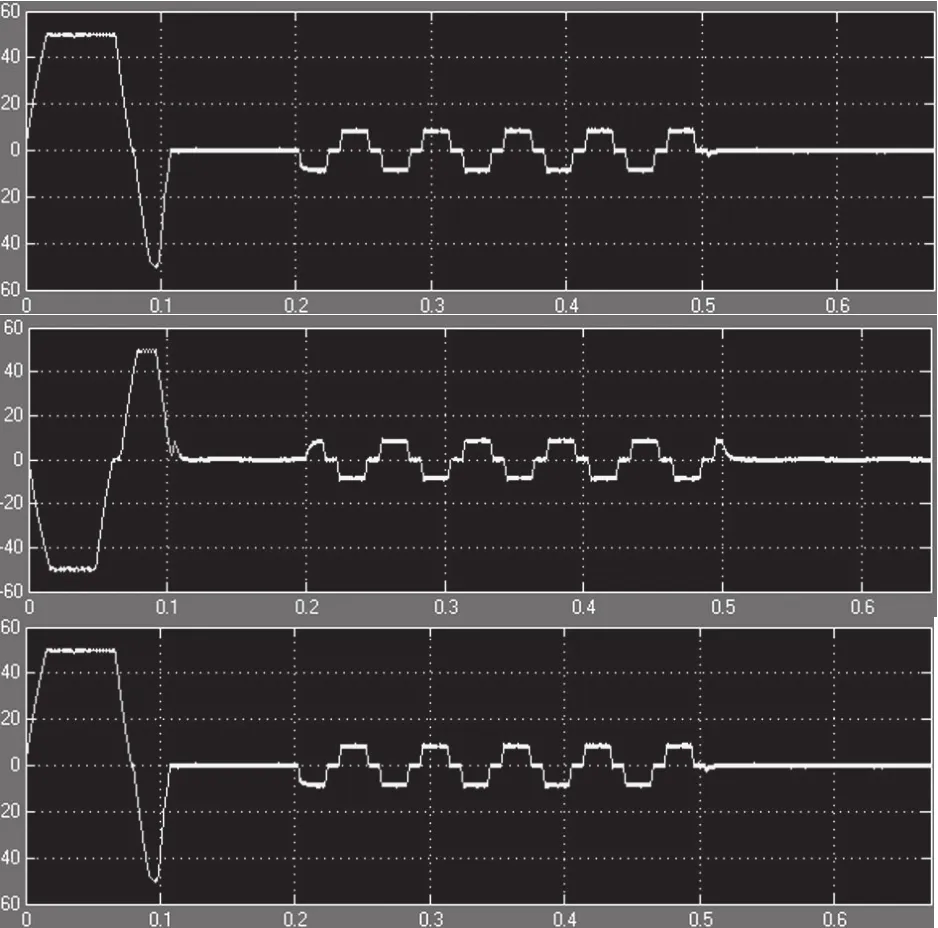
图5 电流 波形
系统的三相电流的波形如图5所示,在空载运行时电流为零,加上负载后电流增加并迅速达到稳态,由于换向的影响,方波电流波形的平顶部分有脉动。仿真结果证明了本文所提出的这种新型BLDC仿真建模方法的有效性及控制系统的合理性。图6和图7为系统在模糊PID和常规PID控制下的速度响应曲线。

图6 PID控制速度响应曲线
在模糊PID控制下,系统在0.115s内到达稳定,在0.2s突加负载,在0.5s时去掉负载,系统比较快速地恢复到稳定状态;在普通PID控制下,系统反应则较慢,在大约0.19s达到稳定。

图7 模糊PID控制下系统阶跃响应

图8 PID控制下系统阶跃响应
从图8模糊PID控制下的系统阶跃响应与图9的PID控制下的阶跃响应来看空载稳速运行时,电磁转矩为零,加上负载后,转矩迅速调整到相应的稳态,转矩有一点脉动,这主要是由电流换向和电流滞环控制器的频繁切换造成的。另外,相电流的波动也导致了转矩的脉动。
从图10和图11为系统在模糊PID和常规PID控制下的系统跟踪特性曲线仿真中可以看出,采用模糊自适应PID控制器,系统的反应速度、稳定性以及跟踪特性都较普通PID控制有所提高。而且还免去了PID的参数调试过程,加快了系统的设计。参数自调整模糊PID控制器由于只考虑系统得输入和输出的变化情况,不受系统参数变化的影响,所以具有很强的参数适应性和鲁棒性,而且较好地改善了一般模糊控制器精度不高的缺陷。同时,由于模糊PID控制器的实时控制只需查找模糊控制表,没有复杂的实时运算,具有很快的响应速度,因此适用于电机调速系统的高速控制,具有较强的实用价值。
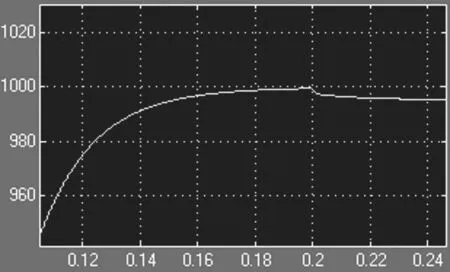
图9 模糊PID控制系统跟踪曲线
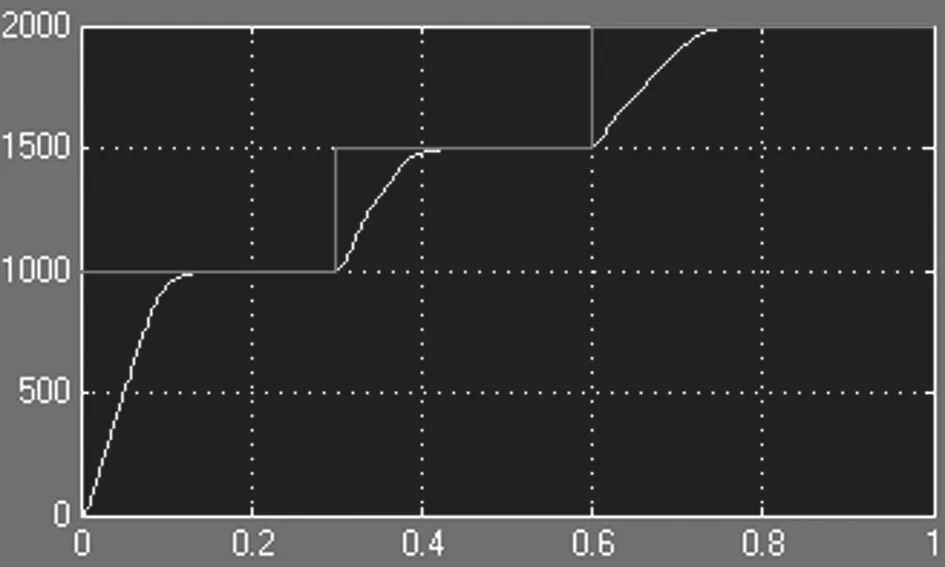
图12 PID控制系统跟踪曲线
4 结束语
仿真的无刷直流电机模型都是通过其数学模型建立的,在此基础上建立双闭环控制系统,并在速度环中加入了模糊控制环节,还能对PID 控制器的动态跟踪品质进行优化,具有较强的鲁棒性;因此,模糊自适应PID 控制策略在改善BLDC 调速系统性能方面表现出了更强的功能特性,也为非线性系统的控制、建模、辨识等提供了有效的方法与工具。仿真实验结果表明,波形符合理论分析,系统能够在较短的时间内达到稳定,并且超调小,具有良好的动、静态性能。
[1] 张秀香. 无刷直流电动机的数学模型建立及参数辨识[J].兰州工业高等专科学校学报, 2006, 13(4): 28-31.
[2] 王永.“反电势法”无刷直流电机控制系统研究[D].南京:东南大学,2004.
[3] 裴广东. 基于直流伺服系统的模糊自适应控制的应用研究[D].南京:南京理工大学,2004.
[4] 董期林,周晓东,马媛.张淑梅.基于模糊自整定PID控制器的直流电机伺服系统的仿真研究[J]. 机床与液压,2009,37(2):117-119.
[5] 乔志杰,王维庆. 模糊自适应控制器的设计及其仿真[J].自动化与仪表,2008(1):26-29.
[6] 陈新荣. 无刷直流电机无位置传感器控制系统的设计和研究[D].南京:南京航空航天大学,2007
[7] 白金,韩俊伟. 基于MATLAB/Smi ulink环境下的PID参数整定[J].哈尔滨商业大学学报, 2007, 23(6):674-681.
[8] 许敏.基于MATLAB 的无刷直流电机自适应控制系统的研究[J].机械设计与制造.2009(3):133-135.
猜你喜欢
大电机技术(2022年5期)2022-11-17
北京航空航天大学学报(2022年6期)2022-07-02
测控技术(2018年12期)2018-11-25
电子制作(2017年1期)2017-05-17
照明工程学报(2016年3期)2016-06-01
电测与仪表(2016年2期)2016-04-12
北京航空航天大学学报(2016年4期)2016-02-27
云南电力技术(2015年2期)2015-08-23
淮南师范学院学报(2015年3期)2015-03-22
弹箭与制导学报(2015年1期)2015-03-11
