
无人机全空域飞行影响因素分析
2011-03-16 09:20蔡志浩
北京航空航天大学学报 2011年2期
蔡志浩
(北京航空航天大学 无人驾驶飞行器设计研究所,北京 100191)
王英勋
(中国航空工业集团公司 重大项目管理部,北京 100022)
杨丽曼
(北京航空航天大学 自动化科学与电气工程学院,北京 100191)
李新军
(中国航天科技集团 研究发展部,北京 100048)
无人机全空域飞行影响因素分析
蔡志浩
(北京航空航天大学 无人驾驶飞行器设计研究所,北京 100191)
王英勋
(中国航空工业集团公司 重大项目管理部,北京 100022)
杨丽曼
(北京航空航天大学 自动化科学与电气工程学院,北京 100191)
李新军
(中国航天科技集团 研究发展部,北京 100048)
进入全空域飞行是未来无人机发展的必然趋势,所面临的关键问题是安全性和空中交通管理.根据无人机大、中、小型,低、中、高速并存的特点,分析了无人机安全性和影响其全空域飞行能力的关键因素与改进方法,包括建立分类管理机制,提高自主导航与控制能力,进行动态任务规划,采取协调机制,增强环境感知与规避能力等.进一步提出了无人机空域飞行的建模/仿真理论框架,目标是在提高无人机可靠性的基础上,使其具备全空域飞行能力,从而降低无人机使用成本、提高空域共享能力,实现有人机、无人机共享空域.
无人机;空域;空中交通管理;自主智能体
无人机(UAV,Unmanned Aerial Vehicle)已具备全空域飞行的能力,飞行高度覆盖从近地面的几十米到几万米高空.无人机飞行范围扩大的同时,使用时间也快速增长:2010年 4月,美国军方统计,捕食者系列无人机总飞行时间达到 100万小时.在无人机全空域使用、飞行频次不断增加的情况下,空中安全问题日益凸显[1].美国曾在2003年初对 3种无人机进行安全性调查,以捕食者为例,它在 10万飞行小时中总共发生 32次严重事故,相形之下,F-16只发生 3次.美国 2002~2027年的无人机发展路线图中,希望无人机未来的安全表现应该减少到每 10万小时不超过20次[2].
除本身的飞行安全问题外,无人机进入非隔离空域飞行还会遇到技术、法规和协调程序上的问题.英国《飞行》杂志称在发生了两次由于无人机过于靠近客机而造成的事故后,以色列航空公司飞行员协会要求出台严格的制度来限制无人机使用民用飞行航线,在有关法律出台前立刻采取措施防止类似事故的发生,主要的措施仅包括禁止没有安装 C模式发射机问答器的无人机在民用航线 28 km的范围内飞行[3].因此,要保证包含无人机的空域飞行安全有序,需面对的问题就是提高无人机的自身安全性并建立空中交通管理机制,使其具备空域飞行能力.
1 无人机安全性
1.1 自身安全性
无人机自身安全性是保证空中飞行安全的前提,它受设计、制造、机载设备性能以及飞行器对恶劣环境的适应能力等因素制约,与成本直接相关.美国的研究表明,无人机飞行安全事故 37%源于发动机及其控制模块故障.无人机的导航、飞控系统和软件可靠性是影响其安全性的第二大因素.相当一部分无人机滞空时间长、被派到危险地区执行任务也是造成无人机毁伤的重要原因.美国 2007~2032年的无人机路线图中对灾难性事故率进行了分析,无人机飞行的灾难性事故率比有人军用飞机高出 1~2个数量级.
按预定航线飞行的准确性取决于无人机的导航精度、飞行控制精度以及飞机和设备的抗干扰能力,受飞行气候、电磁环境等条件影响.无人机能够“准确地飞行”是确认目标、有效防止空中冲突的必要条件.提高无人机自身安全性的措施包括改进发动机本体、燃油、滑油及控制单元在内的动力系统、传感器系统、执行机构、软件等各方面的可靠性,进行有别于有人驾驶飞机的独立设计.
1.2 全空域飞行
无人机进入非隔离空域将产生与其他各种无人机及有人机之间的空中交通管理问题.美军已经建立了防止无人机与有人飞机碰撞的机制,但还没有达到必要的安全程度,正在致力于研究更可靠的解决方案.欧洲空管局建议在欧洲非隔离空域内飞行的军用无人机,主要运行模式应在“飞行员”的管理下进行,而在数据链损失的情况下,保留以全自主飞行作为安全模式.因而无人机“飞行员”将自然对非管制空域内规定的安全间隔和防止空中相撞负责[4].国内无人机的每次飞行基本上都要“特事特办”,临时批准,并严格限制在隔离空域中飞行,一定程度上影响了无人机的研制和使用.
2 影响因素
在提高无人机自身安全性基础上,分析以下影响因素,使其具备共享有人机空域、进行全空域飞行的能力.
2.1 分类管理
从降低使用成本的角度考虑,用于不同目的的无人机会有不同的大小和重量需要,从而带来机载设备的装载能力和设备技术水平的差异.因此,对不同大小的无人机提出不同的安全和飞行要求,进行分类管理是解决无人机全空域飞行的基础,即:要求不同等级的无人机具有相符的安全性设计,并按对应匹配的空域飞行.
图1是当前主要无人机按起飞重量和飞行高度的分类,主要包括微型、小型、战术、中空和高空/无人战斗机等几种类型[5].
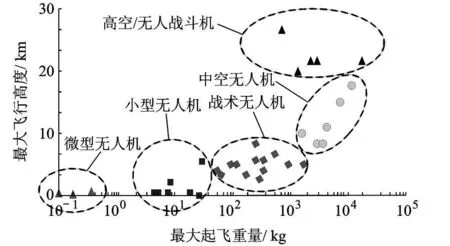
图1 无人机分类
针对不同类型的使用特点,美国定义了 6类空域,在各类空域飞行的飞机分别要不同程度地接受相应的空中交通管理,并按照不同的飞行规则进行飞行,空域分配情况如图 2所示,整个空域划分为 6类[6-7]:A类,6000~20000m,严格按空管飞行;B类,主要机场周边,低于 3000m;C类,次于 B的繁忙机场,低于 1200m;D类,有塔台的机场,低于 800m;E类,地面开始,A~D类外空间;G类,非管制空域.
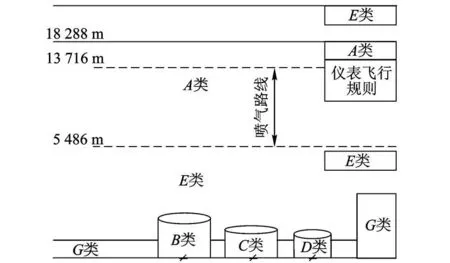
图2 空域等级划分
对应以上 6类不同空域的等级特点见表 1.

表 1 不同空域等级特点
因此,为了确定无人机的运行权、适航标准、操控员培训及取证要求,从空管角度考虑,可将无人机分为 3类:
1)Ⅲ类无人机:具备在所有空域飞行的能力,有人驾驶飞机要遵守的所有法规Ⅲ类无人机都要遵守,如适航和操纵手取证,同时还要求无人机自身具备有人机驾驶员所具有的“感知和避让(See&Avoid)”能力.Ⅲ类无人机通常可进行超视距飞行.
2)Ⅱ类无人机:执行特定任务的非标准无人机,必须提供通过适航和操纵手取证的相关证明,Ⅱ类无人机可在某些特定限制下进行常规飞行.
3)Ⅰ类无人机:类似无线电控制模型的小型无人机,该类无人机通常限制在目视飞行,但仍必须通过适航和操纵手取证等.
通过适航认证并确认操纵手资质都是必备条件,所不同的是链路和机载设备的要求有所区别,基本出发点则从空中交通管理的角度,在飞行规则基础上对无人机进行使用分类,即适用于空中交通的仪表飞行规则或目视飞行规则.无人机的地面指挥员和操纵手应具有类似驾驶有人机时具有的间隔能力,如能够决定目视气象条件是否正向仪表气象条件改变,以及无人机应遵守适用于空域中其他飞行器的通航权规则等[8].
2.2 自主飞行
自主飞行是无人机进入空域飞行的基本条件,影响因素包括自主导航与控制、故障诊断、容错与自修复.
2.2.1 自主导航与控制
自主导航与控制是无人机全空域的必要条件.类似于智能车辆自动驾驶系统,要实现无人机安全的飞行,其导航和飞控系统必须具有一定程度的自主能力,包括航路重新规划、多任务协调规划、控制重构等.无人机的自主导航与控制可在很大程度上降低其对通信链路的依赖程度,提高其在不确定环境和突发事件中的生存能力,同时,人工智能技术的应用将在无人机自主导航与控制中发挥至关重要的作用.
文献[9]对自主控制的能力衡量可划分 6级,如表 2所示.
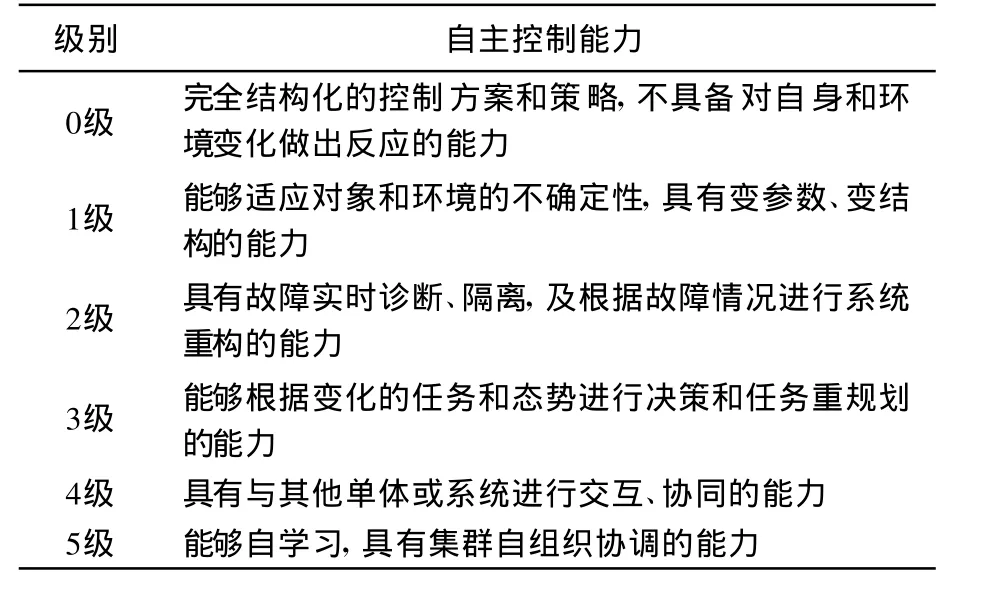
表 2 自主控制的能力衡量等级
高级别的自主系统具有适应性、自修复、智能性、协同性、自学习等特点,能够在不确定的环境中执行任务,具有更好的安全性和空域飞行能力.它所面临的挑战就是在不确定性的条件下,实时或近实时地解决一系列最优化的求解问题.本质上就是需要建立不确定性前提下处理复杂问题的自主决策能力.
由于技术条件的限制,目前无人机的自主化程度还较低.按照美国 2005版无人机系统发展路线图给出的自主程度的分级,目前捕食者无人机仅达到实时故障诊断的自主程度,全球鹰无人机也只有表 2中 2级的自主程度.自主控制水平的提高有赖于智能技术、计算机处理能力和感知技术的突破性发展.
2.2.2 故障诊断、容错与自修复
无人机在飞行过程中可能会遭遇环境的不确定性及自身故障和损伤的情况,其故障诊断、容错与自修复主要体现在如下 6个方面:
1)系统在时变性、非线性和不确定性条件下,具有高度的鲁棒自适应能力;
2)检测和隔离工作过程中出现的故障,进行有效的故障管理;
3)充分利用无故障部件补偿故障部件的功能,实现控制重构;
4)通过链路将故障状况准确实时地发送到地面指挥控制站;
5)通过主动告警提供故障信息,辅助操纵人员正确进行相应处置;
6)通过自主维护诊断提高系统的可维护性.
2.2.3 空管设备
无人机进入全空域飞行必须考虑与现有有人驾驶民航飞机、军用飞机、地面各级管制中心的协调问题,加装相应的空管设备,如大型无人机加装应答机、自动相关监视设备等;小型无人机则至少应提高导航、定位精度并能够及时发布自身状态、提供告警信息,以便通过地面站控制无人机主动避让或地面站与空管的联络要求他机避免冲突[10-11].
2.3 动态任务规划
进入全空域飞行的无人机采取的主要任务模式应为起飞前装订初始任务、制订参考航路,并添加各种约束条件和任务指标,然后根据飞行中的实际情况,动态修正任务计划,实时获得最佳满意的任务规划,使得无人机能够充分灵活地在任务目标和约束条件、变化环境之间折中平衡,及时处理任务执行过程中的不确定因素,保证安全性的同时更好地完成任务.因此,在线的动态任务规划是无人机应具备的重要手段.任务规划的核心内容是优化算法的研究,包括运筹学法、智能化方法、图论搜索方法和人工势场法等[12].
2.4 感知和规避能力
有人机依靠雷达、程序、应答机以及最终的飞行员视觉来避免空中相撞.而对于无人机,它将依靠技术来感知和规避航路上的各种障碍物.目前无人机多是由地面站进行遥操纵或事先装订好任务的,还难以很好地自动感知和规避航路上的障碍物,这可能使它们与建筑物等预先没能准确标明的障碍或是其他飞行器相撞.
感知和规避的能力是美国 2005和 2007年发布的无人机路线图上重点要求实现的功能之一[2].无人机与其他飞机保持间隔的能力必须至少达到常规有人机的标准,并且应能按规定进行“感知和规避”机动以保持间隔.增强无人机的感知和规避能力,其关键技术包括自动相关监视、冲突监测与解决和语音转发技术[13].
2.4.1 自动相关监视技术
自动相关监视(ADS,Automatic Dependent Surveillance)是国际民间航空组织(ICAO,International Civil Aviation Organization)推荐的新监视技术,它通过机载导航系统得到的导航信息(至少包括飞机识别信息和四维位置信息),通过卫星数据链或甚高频空-地数据链自动实时地发送到地面接收和处理系统,然后通过显示设备提供伪雷达画面,成为一次、二次雷达以及机载避撞系统的有利补充[14].
广播式自动相关监视(ADS-B,ADS-Broadcasting)是在 ADS、TCAS(Traffic Alertand Collision Avoidance System)和场面监视的基础上,综合了三者的特点,飞机通过主动对外发送自身准确的状态参数,并接收其他飞机的广播信息,达到飞机间的相互感知,进而实现对周边空域状况全面、详细的了解.在获得充足监视信息的基础上,各飞行单元即可自主地实施航路选择、间隔报障、冲突发现与避免,它的特点体现为自动、相关、广播[1].自动(Automatic):由相关设备自动完成,不需要飞行人员或地面站操纵人员介入;相关(Dependent):需要所有相关飞机均参与到对各自信息的广播中;广播(Broadcasting):所发送的信息不仅仅是点对点的传送到空管监视部门,还要对外广播,使所有通信空域内的单位均能接收到.
无人机作为新加入空域的飞行器,新的监视设备相对更易于添加,而在其自动或自主飞行阶段也更适合采用 ADS-B技术来有效地实现对周边空域环境的感知与避让.
2.4.2 冲突探测与解脱
未来空域飞行的目标是实现接近于车辆在路面行驶的自由程度,自由飞行(Free Flight)就是由每架飞机自主决定飞行的路线并自主导航,这样不但能为航空公司减少飞机在路程中的飞行时间、节约燃料消耗,而且还会因空域的充分利用而获得更多数量的飞行.
然而,飞行数量的增加和自由飞行路线的多向性也增加了飞行冲突的可能性,冲突探测与解脱技术将是影响自由飞行能否实现的一项关键技术.冲突探测就是通过机载和地面监视设备对飞机在空域中的位置和速度信息进行计算,判断飞机之间的距离是否小于最小间隔,是以良好的环境感知能力为前提的.图 3所示为飞行初始间隔与探测能力关系,对于不同飞行速度的无人机应根据其最小探测距离和观察角确定初始间隔,反之在最小间隔确定的空域内,无人机要进入空域飞行,就要具有相匹配的探测能力.

图3 初始间隔与探测能力关系图
冲突解脱是预测到将要发生冲突时规划出避免飞行冲突的轨迹,使得飞行管理系统能够按照该轨迹操纵飞机飞行,并摆脱可能的冲突,同时最大程度地符合燃油消耗、转弯角度范围限制、高度改变限制等方面的要求.增大探测距离和机动性、减小时延、增强实时重规划是提高无人机的冲突探测和解脱能力的着眼点,从而使其具有不同空域的适航能力.
3 建模 /仿真及其校核、验证和确认
由于航空飞行的特殊安全性要求,在无人机与有人机共享空域前,必须进行充分的验证,以保证其可靠性,建模/仿真技术是这种可行性和可靠性的有效验证手段.建立不同粒度、不同类型无人机的飞行模型、空中交通管理相关的感知和规避模型,在现有的有人机空中交通管理仿真系统中进行仿真,考察其对飞行间隔及管制的特殊要求.
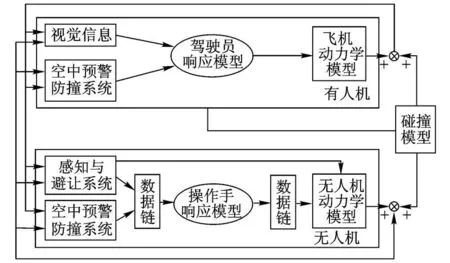
图4 有人机/无人机空中交通管理仿真模型
图4所示为有人机/无人机空中交通管理仿真模型,有别于有人机的驾驶员响应模型和视觉系统,无人机需要通过数据链引入操作手的响应模型,另外无人机还可采用感知和避让系统进行自主的飞行或操作手辅助的飞行.它们通过动力学模型解算并叠加碰撞模型,仿真无人机/有人机混合的空域环境,构成一个闭环系统.
初步的仿真表明:对于中高空亚音速飞行的无人机,可在安装空管设备、操作员及时干预的情况下进入中等繁忙程度的空域飞行.但对无人机空域飞行建模/仿真须经过进一步严密的校核、验证和确认(VV&A,Verification,Validation and Accreditation),以确保建模的精确度和置信度,仿真模型正确描述了无人机/有人机混合的空域系统,从而为制定无人机进入全空域飞行的适航条件建立基础.
4 结束语
在可预知的未来,无人机将在军、民用领域发挥越来越重要的作用,以高度安全性和可靠性执行任务、实现全空域飞行是无人机应具备的能力.分析无人机飞行能力的关键影响因素,从自身可靠性、动态任务规划、感知和规避能力着手,并进行分类管理,加装空管设备.解决这些问题,将使无人机具备全空域飞行的能力.
References)
[1]Loh R,Bian Y,Roe T.UAVs in civil airspace:safety requirements[C]//IEEE Aerospace and Electronic Systems.Piscataway:Institute of Electrical and Electronics Engineers Inc,2009:5-17
[2]Loh R,Bian Y,Roe T.Safety requirements for unmanned aerial vehicles(UAV)in future civil airspace[C]//IEEE/ION Position,Location,and Navigation Symposium.San Diego:Institute of Electrical and Electronics Engineers Inc,2006:1151-1163
[3]Pygott C.Outline safety case for the use of autonomous UAVs in unsegregated airspace[C]//IEE Forum on:Autonomous Systems.London:Institution of Engineering and Technology,2005:1-9
[4]Yadgar O,VincentR.Airspace management of autonomousUAVs[C]//6th International Joint Conference on Autonomous Agents and Multiagent Systems.Honolulu:Association for Computing Machinery,2007:1375-1376
[5]Gheorghe A V,Ancel E.Unmanned aerial systems integration to National Airspace System[C]//2008 1st International Conference on Infrastructure Systems and Services.Rotterdam:IEEE Computer Society,2008:5439598
[6]张进,胡明华,张晨.空中交通管理中的复杂性研究[J].航空学报,2009,30(11):2132-2142 Zhang Jin,Hu Minghua,Zhang Chen.Complexity research in air traffic management[J].Acta Aeronautica et Astronautica Sinica,2009,30(11):2132-2142(in Chinese)
[7]Yagdar O,Agno A,Vincent R.UAV airspace management system UAMS[C]//5th International Joint Conference on Autonomous Agents and Multiagent Systems.Hakodate:Association for Computing Machinery,2006:1-3
[8]王世锦,隋东.低空空域飞行冲突风险研究[J].西南交通大学学报,2010,45(1):116-123 Wang Shijin,SuiDong.Risk analysis of flight conflict in low altitude airspace[J].Journal of Southwest Jiaotong University,2010,45(1):116-123(in Chinese)
[9]王英勋,蔡志浩.无人机的自主飞行控制[J].航空制造技术,2009,8(8):26-31 Wang Yingxun,Cai Zhihao.Autonomous flight control of unmanned aerial vehic le[J].Aeronautical Manufacturing Technology,2009,8(8):26-31(in Chinese)
[10]Correa M A,Camargo J B,Jr.Introducing UAV in the CNS/ATM using cooperative multiagent negotiation[C]//European Safety and Reliability Conference.Stavanger:Taylor and Francis Balkema,2007:2077-2084
[11]Pena N,Scarlatti D,Ollero A.UAVs integration in the SWIM based architecture for ATM[J].Journalof Intelligent and Robotic Systems:Theory and Applications,2009,54(1/2/3):39-59
[12]Lauzon M,Rabbath C,Gagnon E.UAV autonomy for complex environments[C]//SPIE Unmanned Systems Technology VIII.Kissimmee:SPIE,2006:62300J
[13]Simon J N,Braasch M S.Deriving sensible requirements for UAV sense-and-avoid systems[C]//28th Digital Avionics Systems Conference.Orlando:Institute of Electrical and Electronics Engineers Inc,2009:6.C.4-1-6.C.4-12
[14]Rosales JJ,Toledo M,Bonardi L,et al.Development of a UAV low-cost navigation system prototype for ATM applications[C]//22nd International Technical Meeting of the Satellite Division of the Institute of Navigation.Savannah:Institute of Navigation,2009:3471-3479
(编 辑 :李 晶)
Analysis forwhole airspace flight key factors of unmanned aerialvehicles
Cai Zhihao
(Research Institute of Unmanned Aerial Vehicle,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
Yang Liman
(School of Automation Science and Electrical Engineering,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
Wang Yingxun
(Department of Major Program Management,Aviation Industry Corporation of China,Beijing 100022,China)
Li Xinjun
(Department of Research and Develop,China Aerospace Science and Technology Corporation,Beijing 100048,China)
Aiming at the problem of unmanned aerial Vehicles(UAVs)entering non-segregated airspace,UAVs'safety and the key factors of improving their airspace flight capacity were analyzed,according to the characteristics of large scale,medium scale,small scale and low speed,medium speed,high speed UAVs coexisting.The approaches include category management,autonomousnavigation and control,dynamic mission planning,coordinationmechanisms,sense and avoid,etc.Based on improving the UAVs'reliability,they would have the ability of air trafficmanagement inwhole airspace.Modeling and simulation are effective method to validate these approaches.The final target is reducing the cost of UAVs,improving the ability to share more airspace and achieving the goal ofmanned and unmanned air vehicles flying together.
unmanned aerial vehicle(UAV);airspace;air traffic control(ATC);autonomous agents
V 249
A
1001-5965(2011)02-0175-05
2010-07-15
中央高校基本科研业务费专项资金(YWF-10-02-074)
蔡志浩(1979-),男,河南焦作人,讲师,caizhihao@buaa.edu.cn.
猜你喜欢
科技创新导报(2021年33期)2021-04-17
军民两用技术与产品(2021年10期)2021-03-16
民航管理(2020年9期)2020-10-16
科技视界(2020年8期)2020-05-18
中国交通信息化(2019年12期)2019-08-13
民航管理(2019年2期)2019-06-04
劳动保护(2019年3期)2019-05-16
中国市场(2016年32期)2016-12-06
中国市场(2016年12期)2016-05-17
海峡科技与产业(2016年3期)2016-05-17
