
资源约束条件下舰艇编队多智能体协作规划
2011-03-16 09:20吴振东
北京航空航天大学学报 2011年2期
杨 飞 王 青 吴振东
(北京航空航天大学 自动化科学与电气工程学院,北京 100191)
资源约束条件下舰艇编队多智能体协作规划
杨 飞 王 青 吴振东
(北京航空航天大学 自动化科学与电气工程学院,北京 100191)
从分析舰艇编队对海作战的流程出发,在决策过程中引入多智能体系统(MAS,Multi-Agent System)理论,建立了编队协同反舰作战 Agent模型.针对舰艇编队 Agent协作规划过程中受资源约束产生资源占用冲突的问题,建立一种主从式结构多 Agent协作规划模型,并提出一种集中与分布规划相结合的 MAS协作规划方法.仿真实例表明:该方法可有效实现作战编队各 Agent之间的协作与协调,保证舰艇编队在满足资源约束条件下实现预期战术目标.
资源约束;Agent;编队协同;反舰作战;规划
现代战争是信息化的战争,与以往的战争形态相比,信息化战争的一个明显特点就是多维领域中的兵种协同和多平台联合的一体化作战[1].通过一体化作战,使得参战部队能够在各种层次上充分利用武器系统资源,从而可以扩大作战空间,提高部队的实际作战能力.在海上作战中,舰艇编队协同反舰作战已成为现代海上作战的主要形式,对其进行研究的重要性也日趋明显.
舰艇编队协同反舰作战的核心问题,在于如何实现各作战成员之间高效的协作与协调.基于智能体(Agent)和多智能体(MAS,Multi-Agent System)规划[2]是研究协作问题的一种非常重要的方法,但 Agent协同效率不是简单的线性求和,而是一个高耦合度个体间相互作用的增量.在实际对海作战中,舰艇编队要实现战术目标,需要达到时间、空间以及武器数量的多样式协同,而舰艇编队以及导弹武器受自身性能限制,在规划作战方案时必然会产生彼此间的资源占用冲突.目前,基于 Agent的作战仿真领域,相关学者建立了多种不同层次的 Agent协作模型[3-4],但考虑实际协作过程中资源约束的研究甚少.如何在满足资源约束的条件下实现预期的战术目标,协调和消解冲突,是保证协同攻击顺利实施的关键.
因此,本文基于 MAS理论研究资源约束条件下的舰艇编队协同规划方法,旨在为海上编队协同作战的战术战法研究提供贴近实战的方法.
1 编队协同反舰作战 Agent分类
一次反舰作战的基本流程是:收到敌情通报→情报探测→数据融合(建立敌我态势图)→目标分配→方案制定→作战实施→射击效果评定,满足射击要求则执行其他任务,否则重新进行威胁判断并进行目标分配,继续打击.
根据反舰作战任务的流程分析,在编队协同反舰作战过程中,需要设置的 Agent主要包括:战场感知 Agent、总体指挥 Agent、编队指挥 Agent、作战单元 Agent和通信 Agent,各 Agent之间交互关系图如图 1所示.
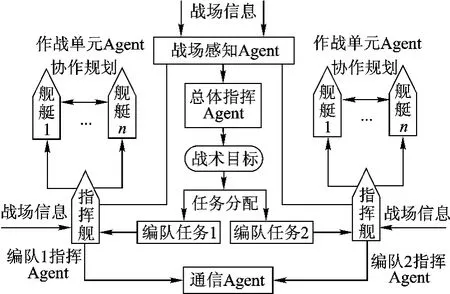
图1 编队协同反舰作战Agent交互关系图
各组成 Agent的作用描述如下:
战场感知Agent:接收来自地面雷达站或空中预警机关于目标的数据情报,经数据计算融合等预处理后,获得目标的综合航迹信息,并根据威胁目标的参数确定该目标的威胁等级,进行威胁程度排序.
总体指挥Agent:负责对当前作战任务进行分析、明确上级意图,判断敌我双方战况、进行地形分析,综合战场态势及参谋人员意见后形成初步作战方案,分配给各作战编队.
编队指挥 Agent:接收初步作战方案,根据目标态势、战术要求、作战编队的武器装备以及其它打击约束条件进行武器-目标分配,制定本作战编队的火力分配方案.
作战单元 Agent:实施编队指挥 Agent制定的火力分配方案,对敌目标进行火力打击.
通信Agent:负责火力分配方案制定过程中多Agent间协作与协调的相关通信.
2 编队作战中的资源约束分析
资源是 Agent操作的对象,也是 Agent产生的对象.舰艇编队在打击目标时,各作战 Agent为完成所担负的战术目标,规划自身的行为进行问题求解,必须占用和消耗相关资源要素,如时间、空间、武器装备、通信通道等.根据资源的使用和消耗特性,资源可分为重复性资源和消耗性资源,重复资源是指可以多次使用的资源,消耗性资源如燃料、弹药等,一旦被消耗掉后就无法再生,其他Agent便无法使用.而编队中的时间和空间这两种资源,它们属于重复性资源还是消耗性资源是相对的:当时间相同时,空间就是消耗性资源;当时间不相同时,空间就是重复性资源;同理,空间相同时,时间是消耗性资源;空间不同时,时间是重复性资源.
图2是空间资源冲突与时间资源冲突的典型示例.当舰艇 1要打击目标 A时,舰艇 2正位于舰艇 1的射向上,这就发生了空间消耗性资源冲突.时间资源冲突与此类似,受舰上发射平台射前准备时间限制,同一发射平台不可能在同一时间发射出 2枚导弹.
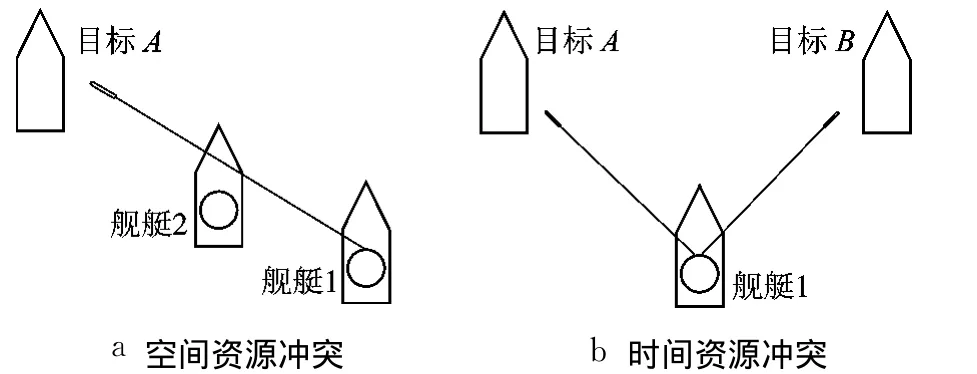
图2 空间与时间资源冲突示意图
对于舰艇编队,协同打击敌目标群的情况比打击单一目标复杂得多.在满足自身资源约束的条件下,还应实现预期的战术目标,因此舰艇编队协同攻击需考虑的资源要素包括以下 4类:
1)我方火力单元特性.主要有型号、数量、位置,对各种目标的毁伤效能以及可用载弹量,转移火力反应时间等.
2)目标单位特性.主要有目标类别、数量、位置、价值、威胁程度、易损性以及目标几何特性(点目标、面目标、群目标)等.
3)最优准则.最大化对目标的毁伤程度(或毁伤目标数),最小化所有火力单位数目和弹药消耗.
4)射击时机条件.主要指目标出现到进行目标分配过程的时间及时机,各平台的火力转移时间等,所有时间应在分配起始线和分配终了线构成的分配区之内进行.
3 编队协同 MAS协作规划模型设计
在舰艇编队中,如果仅将各条舰艇抽象为独立的作战智能体,根据上级下达的战术目标,自主制定行动和攻击方案,由于共享资源的有限性,每个作战单元 Agent在进行行为规划时,必然会与其他 Agent发生冲突,主要表现在对资源的占用冲突[5],并且难以实现统一的战术目标.因此,本文提出一种主从式层次体系结构的 MAS协作规划模型(如图 3所示),其中,管理者 Agent保存着自身的信息、组内成员的信息及同一层次其它Agent的信息,而组内 Agent只保存有其自身的本体信息.当 Agent依靠自身能力不能完成目标或与其它 Agent产生行为冲突时,它通知组内管理者 Agent,该 Agent进行冲突消解,或者调动其它Agent作为协作者来完成目标;如果组内管理者Agent在组内找不到协作者,则与上一级或者同一级管理者 Agent进行交互,直到找到合作伙伴协作完成目标.

图3 主从式MAS协作规划模型
基于文献[6]的抽象模型理论,本文对协作规划过程进行扩展,共分为 6个阶段,将协作模型Cm定义为

Ma:管理者 Agent.在协作过程中,管理者Agent负责制订、分发计划和任务目标.管理者Agent本身又可以分为系统级管理者和组内管理者两类.系统级管理者 Agent负责制订总体计划,组内管理者 Agent能够制订(或者选择)子计划.子计划包含于系统总计划.在多 Agent协作规划过程中,管理者 Agent提出协作需求,对协作目标进行规划并根据其它 Agent特性分发任务和选择协作伙伴.
Cp:协作规划.协作规划是面向目标的问题求解的开始.多个 Agent规划的结果是初步确定出完成协作目标所需要的合作伙伴应当具备的能力及相关特性,以及相互间的分工协作关系.
Ct:参与协作的协作 Agent组.组内管理者Agent属于 Ct.协作 Agent组的生成是系统级管理者 Agent根据参与协作的Agent的主要特性,主要是在完成总体目标过程中可能表现出的能力特性而分成的组.有冲突时先从组内协调,再到系统内协调,可在一定程度上避免混乱状态.
Cs:协作方案.与 Ct相对应,并且属于 Cp的一部分.
Ga:目标.多个 Agent协作要达到的目标.系统目标由系统级管理者 Agent根据实际情况产生,子目标由组内 Agent产生.
Ev:评估能力状况及协作行动结果.
4 编队协同作战 MAS规划方法
编队协同反舰作战方案是在总体指挥机构的组织下,各舰艇兵力经过充分的协商而制定的,因此,应首先由编队各舰艇指挥智能体针对各自的作战任务以及战术目标实施集中规划,并在形成最初的作战方案后,采用分布协商方式对方案冲突进行消除.对于各作战单元间无法通过协商达成一致的矛盾由总体指挥机构进行仲裁.
由此,根据编队协同作战的特点,本文提出一种集中与分布相结合的 MAS规划方法.
4.1 变量定义
规划动作的常用描述方式是由文献[7-8]提出的动作描述语言(ADL,Action Description Language),用动作的前提和效果构成的二元组〈P,E〉来进行描述,即 P为动作的前提条件,E为动作的效果.
本文对 ADL进行了扩展来描述 MAS系统中Agent的动作,在二元组描述的基础上,引入发生动作的 Agent的描述,采用三元组来描述动作.
定义 1动作 O是三元组〈A,Ps,E〉,A为执行动作的 Agent,Ps为前提条件集合,E为动作的效果.O〈A,Ps,E〉表示 Agent(A)在条件 Ps下,执行动作 O,产生状态 E.用 Po表示动作 O的前提条件,用 Eo表示动作 O的效果.
定义 2规划 P是四元组〈Is,Os,St,Gs〉,Is为规划的初始状态,Os为动作集合,St为执行动作过程的约束集及最优准则,Gs为规划的目标状态.
定义 3 任务是 Agent为完成规划而必须承担的工作.任务描述为M〈Mk,Mt,Ms〉,Mk为任务M的类型,Mt为 M所针对的威胁目标,Ms为任务M的消耗.
Agent的各项任务构成一个任务集合,表示为 Ma={M1,M2,…,Mn}.任务之间的优先顺序约束记为 Ma≻Mb,表明任务 A优先任务 B执行.
4.2 规划描述
1)初始状态.总体指挥 Agent根据战场态势,将反舰作战的总任务分解为各编队 Agent的任务集并下发.
2)目标状态.各编队指挥 Agent的任务处理完毕,编队协同反舰火力分配决策方案已制定,作战单元Agent依据行动序列进行实施.
3)资源约束集与最优准则.本文中,舰艇编队对敌作战武器假定为反舰导弹,资源约束条件下制定火力分配方案过程中应遵循如下约束关系以及最优准则:①导弹飞行航路必须符合自身性能要求,即导弹可用过载和转向半径、导弹动力航程等约束;②导弹飞行航路满足航路距离最小以及航路转向点最少原则,即在存在多条可行航路的情况下,应该使选取的可用航路航程尽可能短,航路点数目尽量少,以减少导弹自控终点散布误差,提高捕获概率;③协同实施饱和攻击原则,在导弹武器射前准备时间相对固定的情况,应通过设置发射时间差,使不同时刻由不同作战单元Agent发射的导弹经不同的航路飞行,同时到达一个或多个目标,从而实现对目标的饱和攻击;④全方位打击原则,对同一目标的攻击中,为避免多枚导弹导引头的相互干扰,应使多枚导弹攻入方向互相保持一定夹角;⑤满足转移火力时间原则,对同一作战单元 Agent,向前一目标开火射击以后,在向后一目标开火射击之前,需要有一段转移火力的时间间隔,如果齐发 2枚导弹还需一定的射前准备时间.
4)规划步骤.依据以上对反舰作战编队规划的相关描述,制定 MAS协同规划步骤如下:
步骤 1 总体指挥 Agent对当前作战任务进行分析,在综合战场态势及参谋人员意见后形成初步作战方案,分配给各作战编队.
步骤 2 编队指挥 Agent接收作战方案,对各项任务进行排序,构建自身任务堆栈集合 Ma.
步骤 3 编队指挥 Agent从 Ma中顺序获取当前处理任务 Mi.如 Ma为空集,说明 Agent所有任务规划都已处理完成,转至步骤 10,规划成功.
步骤 4 若 Mi为作战任务,编队指挥 Agent根据自身能力,针对 Mi进行协作需求分析,若需要其它 Agent的协作,转入步骤 6,否则,继续下一步;若 Mi为协作任务,由编队指挥 Agent根据协作内容生成协作行动预案,转入步骤 8.
步骤 5 编队指挥 Agent基于自身作战资源制定针对 Mi的行动预案,转入步骤 8.
步骤 6 编队指挥 Agent根据协作需求分析结果和编队其它 Agent的能力,确定当前任务的协作伙伴集合,并进行优先级排序,完成后转入下一步.如无协作伙伴,转入步骤 5.
步骤 7 编队指挥 Agent按照协作伙伴集合顺序,通过通讯 Agent向协作伙伴发送协作申请.协作伙伴接收申请后,对该申请进行评估,若同意协作,则由协作伙伴根据协作目标和自身作战资源情况制定协作预案;若未批准,编队指挥 Agent从以下 3种路径中进行选择:①向其它协作伙伴申请协作,转入步骤 7;②上报总体指挥 Agent进行仲裁,返回仲裁结果,转入步骤 2;③放弃针对Mi的协作,转入步骤 5.
步骤 8 编队指挥 Agent生成作战预案后,通过通讯 Agent将该预案发送给所有其它 Agent进行冲突检测.若无冲突,该预案正式成为方案,加入作战方案集,供各作战单元 Agent进行实施;若存在冲突,采用冲突消除规则对预案进行冲突消除,返回处理结果.完成后转入下一步.
步骤 9 编队指挥Agent当前任务Mi处理完成,将 Mi从 Ma中删除,转入步骤 2,进行下一任务的规划.
步骤 10 当所有编队指挥 Agent的所有任务规划均完成后,规划结束.
步骤 11 作战单元 Agent根据规划结果对方案集进行顺序实施.
这种 MAS规划方法将集中规划与分布规划的优势相结合,具体作战方案的制定由各编队指挥 Agent分布完成,减轻了作为中央协调者的总体指挥 Agent的计算量,在保证总体指挥Agent在作战规划中主导作用的基础上,减少了对总体指挥的依赖性,使编队数量不受中央协调者计算能力的制约.
5 仿真实例分析
5.1 战局假设
设问题为红、蓝军对抗,假设蓝方雷达发现 4艘敌舰 T1~T4,其中 T1为敌指挥舰,T2~T4为某型驱逐舰,蓝方组织指挥舰 G1与 4艘具有多目标攻击能力的驱逐舰 S1~S4组成作战编队对其进行打击.假设蓝方装备武器为战术导弹,资源约束描述:总载弹数目为 15枚,各作战单元 S1~S4载弹数目分别为 5,3,4,3,对同一驱逐舰作战单元,射前准备时间约束为相邻 2枚导弹发射间隔大于45s,火力转移时间约束为从前一目标至后一目标的火力转移时间大于 56 s.
应用编队协同反舰作战 MAS规划方法,对协同作战方案实施规划,规划过程及结果如下:
1)指挥舰 G1作为总体指挥 Agent,生成战术目标与总体方案:
{以击沉敌指挥舰 T1为首要目标;对敌舰编队实施打击;在武器资源有限条件下,对敌目标实施饱和攻击}
2)驱逐舰 S1作为编队指挥 Agent,接收作战总体方案后,构建任务堆栈 Ma为:①作战任务M1:击沉敌指挥舰 T1;②协作任务 M2:消耗不同作战单元共 4枚导弹对敌指挥舰 T1实施协同饱和攻击;③作战任务 M3:重创敌驱逐舰 T2,T3,T4;④协作任务 M4:击沉敌指挥舰 T1后,各作战平台利用剩余载弹量,对敌 T2,T3,T4实施协同饱和攻击,导弹数目分配为 3枚、3枚、2枚.
3)编队指挥 Agent从 Ma中顺序获取当前任务Mi.
如 Mi为作战任务,则编队指挥 Agent获取编队当前作战单元资源(载弹量),根据作战任务指定目标方位与作战单元位置,计算从各作战单元发射攻击该目标的所有飞行航路及捕获概率,作为备选行动预案.
如 Mi是协作任务,则根据战术要求,实施饱和攻击的协作原则为:①判定当前作战单元Agent载弹量,如载弹量不足则需要其它 Agent协作;②对同一目标,判定当前作战单元 Agent连射 2枚导弹能否满足射前准备时间约束,如不能满足则需要其它 Agent协作;③对不同目标,判定当前作战单元 Agent连射 2枚导弹能否满足火力转移时间约束,如不能满足则需要其它 Agent协作.
导弹飞行航程、对目标捕获概率、发射计时的计算方法见文献[9],当前任务 Mi的协作作战单元 Agent优先级排序原则为:①载弹量多的优先选取;②飞行航路打击主要目标的优先选取;③飞行航路航程较短的优先选取;④对当前目标捕获概率较大的优先选取.
经过最终冲突检测后,形成作战方案集为:参与打击目标 T1的作战单元 Agent组为 S1,S3,打击目标 T2的作战单元 Agent组为 S1,S2,S3,打击目标 T3的作战单元 Agent组为 S2,S4,打击目标T4的作战单元 Agent组为 S2,S3,最终 Agent编队对多目标实施协同攻击的态势图见图 4,规划产生的协同作战方案见表 1.
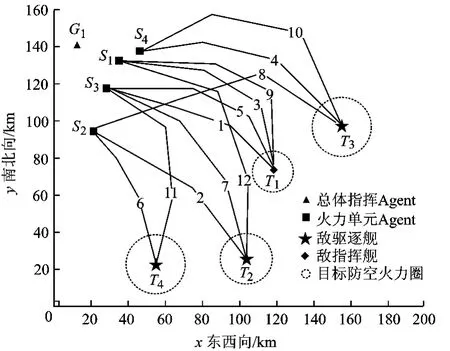
图4 Agent编队对多目标实施协同攻击态势图
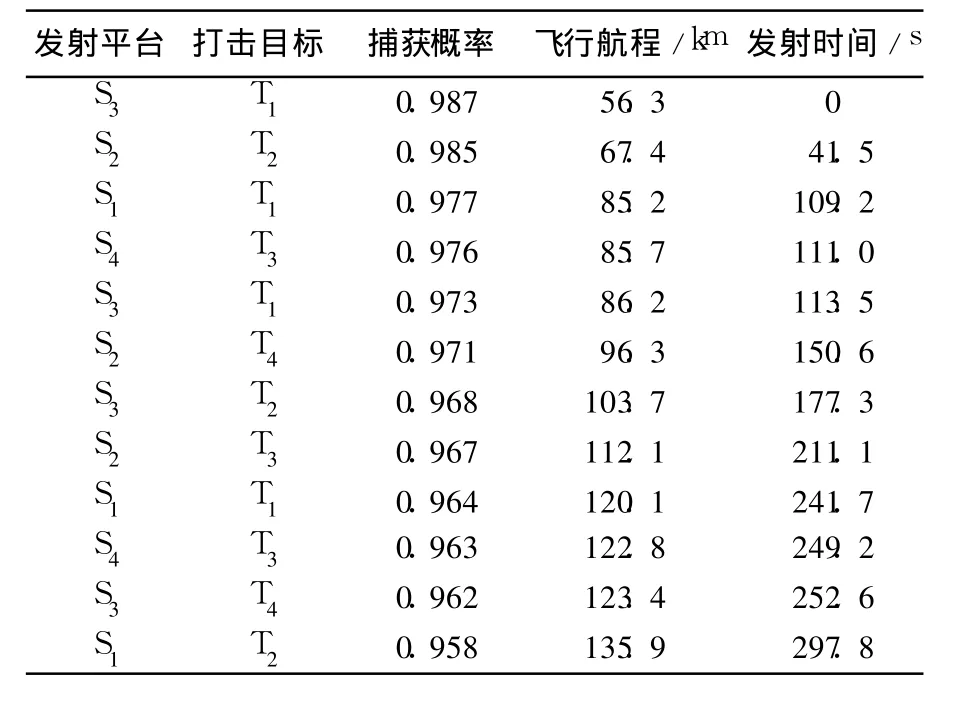
表 1 规划产生的协同作战方案
5.2 结果分析
最终形成的作战方案已消除所有冲突,满足载弹量以及火力转移时间等资源约束,编队指挥Agent将作战方案分发至各火力单元 Agent后,各火力单元 Agent根据方案中本单元发射导弹数以及发射时间顺序发射,就可以使不同火力单元不同时刻发射的多枚导弹同时到达目标,从而实现对该目标的协同饱和攻击.
6 结束语
协同作战是未来战争的重要作战模式.本文基于多 Agent理论方法进行编队协同反舰作战Agent功能分类,并提出一种集中与分布相结合的MAS规划方法,可对 Agent间规划产生的资源冲突进行协调和消除,保证舰艇编队在满足资源约束条件下实现预期战术目标,仿真的结果可以为部队发射平台配置和火力分配提供依据与参考.为了方便研究,仿真过程中对导弹攻击过程中航路规划进行了简化,资源约束的种类还可以进一步扩充,例如考虑海上岛屿障碍以及禁飞区等.在通用性较高的对抗仿真中,这些因素是不可回避的难点问题,也是下一阶段研究的重点.
References)
[1]胡晓峰,罗批,司光亚,等.战争复杂系统建模与仿真[M].北京:国防大学出版社,2005:78-82 Hu Xiaofeng,Luo Pi,Si Guangya,et al.Complicated war system modeling and simulation[M].Beijing:National Defense University Press,2005:78-82(in Chinese)
[2]Oliveiro E,Klaus F.Multi-Agent systems:which research for which applications[J].Robotics and Autonomous Systems,1999(27):91-106
[3]李皓,常国岑,孙鹏.基于 Agent的作战方案自动生成系统研究 [J].系统工程与电子技术,2009,31(1):134-136 Li Hao,Chang Guocen,Sun Peng.Research on operational plan making system based on Agent[J].Systems Engineering and E-lectronics,2009,31(1):134-136(in Chinese)
[4]廖沫,陈宗基.基于多 Agent分布协同拍卖的动态目标分配算法[J].北京航空航天大学学报,2007,33(2):180-183 Liao Mo,Chen Zongji.Dynamic target assignment method based on multi-agent decentralized cooperative auction[J].Journal of Beijing University of Aeronautics and Astronautics,2007,33(2):180-183(in Chinese)
[5]Richard W P,Anne SM.Modelling human and organization behavior:application to military simulations[M].Washington DC:National Academic Press,1998:335-341
[6]Wooldridge M.多 Agent系统引论[M].北京:电子工业出版社,2003:14-16 Wooldridge M.Multi-Agent system Introduction[M].Beijing:E-lectronic Industry Press,2003:14-16(in Chinese)
[7]Kim B I,Heragu S S,Graves R J,et al.A hybrid scheduling and control system architecture for warehouse management[J].IEEE Transactions on Robotics and Automation,2003,19(6):991-1001
[8]Wooldridge M,Jennings N R.The cooperative problem solving process[J].Journal of Logic&Computation(S0955-792X),1999,9(4):563-592
[9]阚亚斌,史剑飞.反舰导弹航路规划战术决策研究 [J].装备指挥技术学院学报,2005,16(2):74-79 Kan Yabin,Shi Jianfei.Research on anti-ship missile route program tactical decision[J].Journal of the Academy of Equipment Command&Technology,2005,16(2):74-79(in Chinese)
(编 辑:刘登敏)
Form ation cooperative planning m ethod based on mu lti-agent with resource constraints
Yang Fei Wang Qing Wu Zhendong
(School of Automation Science and Electrical Engineering,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
After analysis on the anti-ship combat process of ship formation,theory of multi-agent system(MAS)was introduced into the decision-making process,and then the formation cooperative anti-ship combat agent model was established.Aiming at the key problem that the resource constraints among formation agents induced resource occupied conflict in the formation agent cooperation process,a principal and subordinate structure multi-agent planning pattern was proposed accomplished with proposinga MASp lanning method combining centralization with distribution.The simulation result showed that the method could effectively realize the cooperation among combat formation agents,and ensured the formation agents achieving anticipated tactical goal under the condition of resource constraints.
resource constraint;Agent;formation cooperation;anti-ship combat;planning
TP 391.9
A
1001-5965(2011)02-0210-06
2010-01-04
总装国防预研基金资助项目(9140A 04040109HK 01)
杨 飞(1983-),男,山东聊城人,博士生,Yangfei0306@163.com.
猜你喜欢
环球时报(2022-12-30)2022-12-30
凤凰动漫(军事大王)(2022年3期)2022-06-17
作文成功之路·小学版(2019年8期)2019-09-18
人大建设(2019年4期)2019-07-13
小学生学习指导(低年级)(2019年4期)2019-04-22
北京航空航天大学学报(2017年3期)2017-11-23
读者(2017年14期)2017-06-27
北京航空航天大学学报(2017年10期)2017-04-20
海军航空大学学报(2015年4期)2015-02-27
导航定位与授时(2014年2期)2014-04-27
