
盾构管片拼装机举升机构优化设计
2011-03-17 01:43王南卢军广平恩顺李鹏飞
河北工程大学学报(自然科学版) 2011年2期
王南,卢军广,平恩顺,李鹏飞
(河北工程大学机电学院,河北邯郸056038)
盾构机是一种用于隧道开挖的专用工程机械,现代盾构机集机、电、液、传感、信息技术于一体,广泛应用于地铁、铁路、公路、市政、水电隧道工程。管片拼装机是盾构机的关键部件之一,当盾构向前掘进一环后,管片拼装机会按预定要求将混凝土管片拼装成环,形成衬砌,以此来支护刚开挖的隧道表面[1]。
目前日本和欧美等国盾构机企业正在研制高效、可靠、智能化的管片自动拼装机系统。国内的盾构机生产研制企业以及一些高等院校在引进、消化、吸收国外盾构掘进机先进技术基础上,在管片自动拼装机研究方面积极跟进,设计出了一些新的构型。钱晓刚等[2]提出了一种基于球面2自由度并联机构的管片拼装机,具有一定的创新性。张占强[3]设计出6自由度串-并混联构型的管片拼装机,能够精确快速定位拼装。
平行四边形举升机构是一种结构稳定,定位快速、准确的构型,广泛应用于旋挖钻机、桥梁检测车等工程机械,但是其在盾构管片拼装机上的应用,目前仅见于德国海瑞克公司生产的AVN泥水平衡盾构机[4]。本文在对比平行四边形举升机构管片拼装机与传统的升降油缸管片拼装机的基础上,将平行四边形举升机构进行建模分析,并使用MATLAB优化工具箱对其进行了优化设计,为盾构管片拼装机机构选型设计提供了参考和依据。
1 管片拼装机工作原理
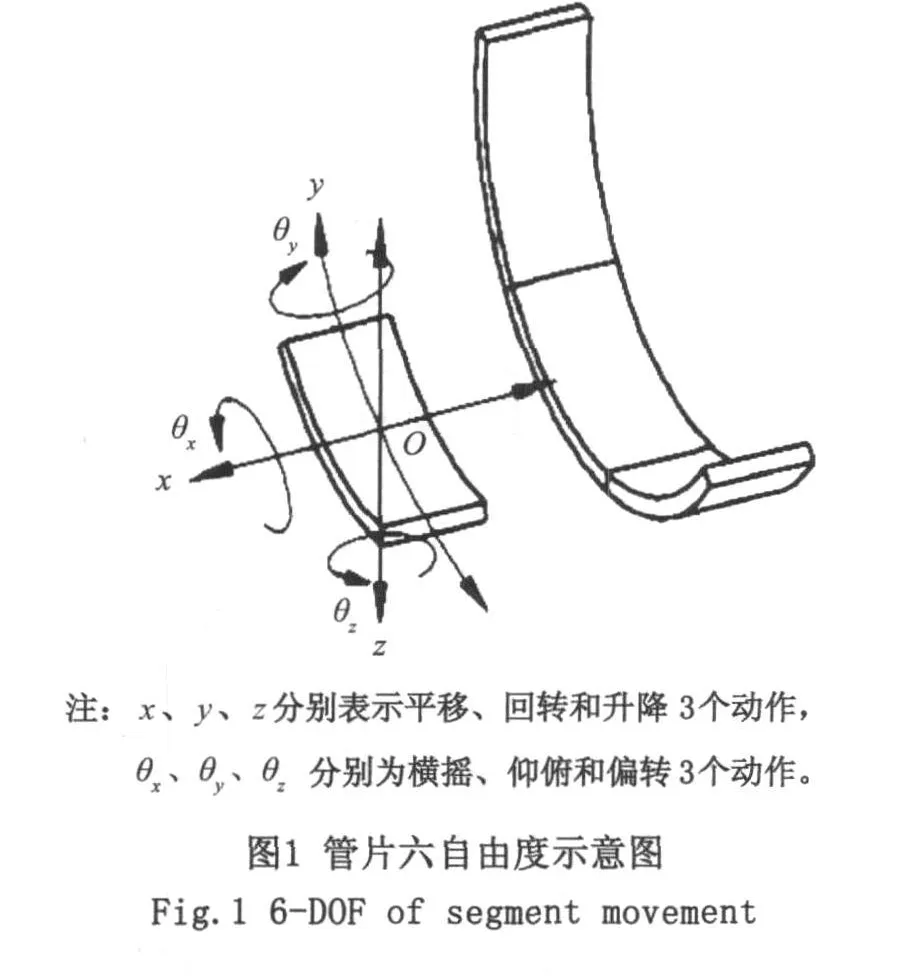
管片拼装机由平移机构、回转机构、举升机构和微调机构组成,能实现平移、回转、升降、仰俯、横摇和偏转6种动作。6种动作与管片的6个自由度相对应,如图1所示。
管片拼装机进行管片安装时,先粗定位(管片的运动控制),即用管片夹具或真空吸盘抓住管片,升降油缸将其升降,平移机构将提起的管片移到拼装的横断面位置,回转机构再将该管片旋转到相应的径向位置;然后再用偏转油缸、仰俯油缸和横摇油缸的不同步伸缩进行微调定位(管片的姿态控制),最后完成安装[5-6]。
2 管片拼装机举升机构类型
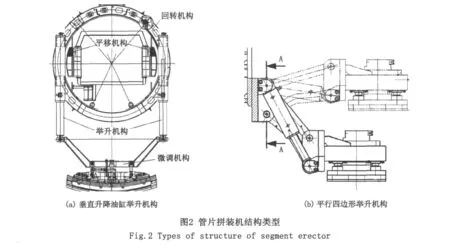
管片拼装机举升机构主要功能是完成管片沿隧道径向的举升。目前来说,管片拼装机举升机构有垂直升降油缸举升机构和平行四边形举升机构两种(图2)。
2.1 垂直升降油缸举升机构
垂直升降油缸举升机构由对称布置的两个油缸以及升降梁组成,油缸缸体固定在旋转盘体上,活塞杆与下部的升降梁铰接,使升降梁和油缸同步运动,导向块固定在旋转盘体上,缸体从中间通过,导向块起导向和增加缸体刚度的作用(图2-a)。
垂直升降油缸举升机构结构对称,承载能力大,是目前应用最广泛的类型。但是由于呈悬臂支撑结构,举升机构在行程最大位置时的抗弯性能是设计时主要考虑的问题。另外举升油缸尺寸较大,行程比较长,受压时可能出现失稳现象,这将严重影响管片安装精度[7]。
2.2 平行四边形举升机构
两曲柄等长的双曲柄机构称为平行四边形机构,它是应用最广的一种双曲柄机构。因平行四边形机构的两个曲柄等速转动,连杆平动,故又称为等角速度机构,平行四边形机构可以实现连杆平动,因此可以作为管片拼装机举升机构使用。德国海瑞克AVN2440DS泥水平衡盾构机采取平行四边形机构实现垂直举升功能(图2-b),该平行四边形举升机构由基座、转动轴,两个液压油缸和铰接板件以及微调机构连接基座组成[4]。
平行四边形举升机构具有油缸行程短、结构紧凑等特点,应用于空间较小的中小型盾构之中,可以避免抗弯特性差、油缸失稳等现象。
3 平行四边形举升机构的优化设计
3.1 模型分析
将上述管片拼装机平行四边形举升机构进行简化分析,得出如图3所示机构简图。
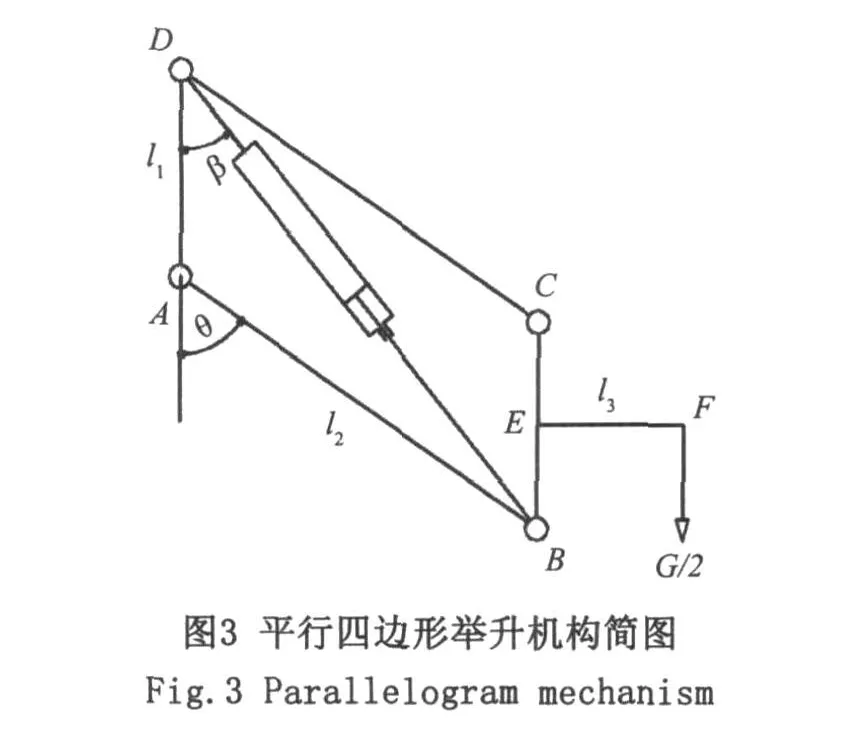
图中,l1—连杆AD长度;l2—连杆 AB长度; l3—杆EF长度;FCD—CD杆所受压力;FBA—AB杆所受拉力;FY—液压油缸轴向拉力;θ—平行四边形机构旋转角度;β—液压油缸旋转角度;G—管片重量,此机构由两个液压油缸驱动,因此图示中所受载荷取G/2。
对平行四边形举升机构进行受力分析,
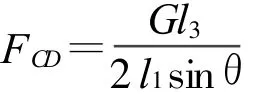
(1)CD杆所受压力FCD
(2)液压油缸轴向拉力FY


化简可得
通过计算可知液压油缸轴向拉力的大小与连杆A D长度l1和连杆AB长度l2有关,当杆长确定时,液压油缸轴向拉力随着平行四边形机构旋转角θ变化而变化[8]。
3.2 优化设计
平行四边形举升机构优化设计的目标是在一定载荷下,在满足设计要求和约束条件的情况下,使液压油缸轴向拉力最小,并使平行四边形举升机构转动灵活,从而减小平行四边形举升机构的整体尺寸和重量[9-10]。
(1)确定设计变量
根据平行四边形机构受力特点,选取l1、l2、l3为设计变量,但由于液压油缸轴向拉力的大小与l3无关,所以设计变量为x={l1,l2}。
(2)建立目标函数
优化设计的目的是,在载荷G一定时,通过合理设计参数l1,l2,使得平行四边形升降机构液压油缸轴向拉力最小。根据举升机构基本模型分析,可知目标函数为:
(3)确定约束条件
根据管片拼装机水平移动距离为1 385cm,垂直移动距离为474cm的要求,以及管片长度参数和微调机构参数,设计变量 l1,l2允许变化的范围是15cm≤l1≤25cm;40cm≤l2≤55cm。
其约束条件为:g1:15-l1≤0;g2:l1-25≤0; g3:40-l2≤0;g4:l2-55≤0。
为了保证平行四边形举升机构传动灵活,能够满足工作要求,应使平行四边形举升机构的平行四边形机构旋转角度θ满足条件60°≤θ≤105°。
其约束条件为:g5:60°-θ≤0;g6:θ-1 05°≤0。
(4)计算求解
使用MATLAB优化工具箱中的fmincon函数进行优化,并编制计算程序。经过迭代运算,得到优化后的结果为x={l1,l2}=(25,40)。
利用MATLAB的绘图函数PLOT绘制出优化前后液压油缸在角度变化时受力曲线如图4所示。

从图4可以看出,优化前平行四边形举升机构旋转角度从60°增加到105°,液压油缸受力从13kN近似线性减小到10.1kN。优化后从60°旋转到到105°时,液压油缸受力从10.2kN近似线性减小到6.6kN。优化后平行四边形举升机构油缸受力明显比优化前小,优化效果非常明显。
4 结论
1)平行四边形举升机构在空间布置和结构性能方面都优于垂直升降油缸举升机构。
2)优化后平行四边形举升机构油缸受力明显小于优化前,优化效果非常明显。
[1]陈馈,康宝生.国内外盾构法隧道施工实例[M].洛阳:中铁隧道集团有限公司,2006.
[2]钱晓刚,高峰,郭为忠.六自由度盾构管片拼装机机构设计[J].机械设计与研究,2008,24(1):17-20.
[3]张占强.小直径全断面掘进机管片拼装机设计研究[D].长春:吉林大学,2009.
[4]德国海瑞克公司.AVN2440DS泥水盾构技术文件[Z]. 2003.
[5]管会生,黄松和,徐济平.盾构管片拼装机设计研究[J].矿山机械,2005,33(3):15-16.
[6]李文福.盾构管片拼装机的结构分析[J].山西建筑, 2010,36(5):337-339.
[7]岳彦炯.基于虚拟样机的六自由度隧道管片拼装机设计研究[D].长春:吉林大学,2005.
[8]林建龙,王小北.平动式轻型装卸机机械手的优化设计[J].轻工机械,2004(1):57-59.
[9]MAGRAB E B.MATLAB原理与工程应用[M].高会生,李新叶,胡智奇,译.2版.北京:电子工业出版社, 2006.
[10]华大年,华志宏.连杆机构设计与应用创新[M].北京:机械工业出版社,2008.
猜你喜欢
装备制造技术(2021年4期)2021-08-05
冶金设备(2020年2期)2020-12-28
航空发动机(2020年3期)2020-07-24
城市建设理论研究(电子版)(2019年9期)2019-09-16
铁道建筑技术(2019年5期)2019-09-14
纤维复合材料(2018年2期)2018-12-07
发明与创新·中学生(2018年2期)2018-02-07
时代英语·高二(2017年4期)2017-08-11
天津体育学院学报(2016年3期)2016-12-18
工程建设与设计(2016年4期)2016-02-27
