
一类静态输出非脆弱控制器的设计
2011-04-07 05:50陈文清沈文杰宋书中
河南科技大学学报(自然科学版) 2011年2期
陈文清,沈文杰,宋书中
(1.洛阳理工学院电气工程与自动化系,河南洛阳471003;2.河南科技大学电子信息工程学院,河南洛阳471003)
0 前言
众所周知,基于T-S模型的模糊控制是研究非线性系统比较成功的方法之一,已有很多成果面世[1-3]。对于一些非线性系统当用T-S线性模型不能近似描述时,可以用T-S模糊双线性模型来近似描述[4]。
非脆弱性是控制器设计中的一个重要的因素。非脆弱性表示控制器发生参数摄动时,仍能维持闭环系统稳定的能力。近年来对非脆弱控制器的研究已成为人们感兴趣的课题[5],上述结果大多是关于状态反馈或基于观测器的状态反馈,关于静态输出反馈控制的结果则很少[6]。输出反馈控制直接利用系统的输出量来设计控制器,且静态输出反馈控制器结构简单,具有良好的应用价值。
本文针对一类模糊双线性系统,在控制器存在加性摄动的情况下,研究了非脆弱静态输出反馈控制问题。根据Lyapunov稳定性理论及线性矩阵不等式(LMI)方法,得到了非脆弱保性能模糊控制器存在的充分条件,并给出了求解控制器的方法。
1 系统的模型描述
考虑一类模糊双线性系统(FBS),第i条模糊规则可描述如下[1]:

其中,Ri是第 i条模糊规则;s是模糊规则数目;Mji,j=1,2,…,v是模糊集合;ξ(t)=[ξ1(t),ξ2(t),...,ξv(t)]T是前提变量;x(t)、u(t)和y(t)分别是状态变量、控制输入和测量输出;Ai,Bi,Ni,Ci是已知的系统矩阵。采用静态输出反馈控制,这里假设ν=q及ξ1(t)=y1(t),...,ξv(t)=yq(t)。
通过单点模糊化,乘积推理和中心平均反模糊化方法,模糊控制系统的总体模型为:

第i个子系统的输出反馈控制律为:

其中,ρ>0是待定的标量;Ki∈R1×q是待定的控制器增益;△Fi表示控制器增益的加性摄动,具有结构形式△Fi=HiFi(t)Efi,Hi,Efi是反映不确定性结构的常数矩阵,Fi(t)是一个未知时变矩阵,其元素Lebesgue可测且对任意的t满足:F(t)Fi(t)≤I。

则整个系统的状态反馈控制律可表示为:

在控制律(4)的作用下,整个闭环系统的方程可表示为:

2 主要结论
引理1[7]设M,N是适合维数的实矩阵,则对于标量ε>0,有MTN+NTM≤εMTM+ε1NTN成立。
引理2[8]给定适当维数的矩阵G,E和对称矩阵S,不等式S+GFE+ETFTGT<0对所有满足FT(t)F(t)≤I的矩阵F(t)成立,当且仅当存在一个常数ε>0,使得S+εGGT+ε1ETE<0。
定理1 对于给定的常数ρ>0和ε1>0,如果存在着矩阵Z>0和矩阵Ki,i=1,2,…,s满足不等式(6),则闭环系统(5)是渐近稳定的,控制律(4)是一个非脆弱控制律。
证明 选取如下Lyapunov函数:

其中,P=Z-1是待求的正定对称矩阵。
沿着系统(5)的轨线,对V(t)求导,可得到:

由引理1可知:

对定理1中的式(6)同时左右乘diag{P,I,I},并由Schur补定理可得到:V(t)<0。由此可知闭环系统(5)是渐近稳定的,且控制律(4)是一个非脆弱控制律。
定理2 对于常数ρ>0和ε1>0,ε2>0,0<a<ε1,如果存在着矩阵Z>0和矩阵Ki,i=1,2,…,s满足LMI(10),则系统(5)是稳定,控制律(4)是一个输出非脆弱保性能控制律。

证明 由Schur补定理,式(10)可等价于:

由引理2可知,式(11)可推导出:
由Schur补定理可知,式(12)可等价于:

从而可知定理1中式(6)成立,那么可知闭环系统是渐近稳定的。
3 算例分析
考虑一个模糊双线性系统:

系统方程为:

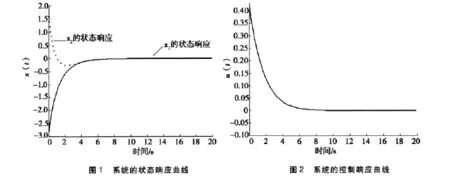
考虑控制器的加性摄动△F(t)为:H1=H2=0.1,Ef1=0.01,Ef2=0.01,F(t)=sin t。选取隶属度函数为μM1(y1)=,μM2(y1)=1μM1(y1)。选取ρ=0.87,ε1=10,ε2=0.11,a= 0.01,根据定理2,通过Matlab求解相应的LMI,可以得到:K1=[0.101 4],K2=[0.344 2]。
选取初始值为[-2.8 1.6]T,MATLAB仿真可得到系统的状态响应曲线和控制响应曲线(见图1和图2)。从图1和图2中可以看出:非脆弱控制器在受到干扰时可以保证闭环系统的渐近稳定。
4 结论
本文研究了一类模糊双线性系统的静态输出反馈非脆弱控制问题。当状态变量不可观测时,采用静态输出反馈进行控制。利用并行分布补偿算法,结合线性矩阵不等式技术,得出了控制器增益具有加性摄动时的模糊反馈控制器的设计方法,而且控制器增益可由LMI求出。由实例仿真验证了本文所提方法的有效性。
[1] Qiu Jianbin,Feng Gang,Yang Jie.A New Design of Delay-Dependent Robust H∞Filtering for Discrete-Time T-S Fuzzy Systems With Time-Varying Delay[J].IEEE Trans Fuzzy Syst,2009,17(5):1044-1058.
[2] 尹云飞.数据挖掘与人工智能技术[J].河南科技大学学报:自然科学版,2004,25(3):44-47.
[3] 徐巍,张业鹏.基于遗传算法的模糊神经网络控制器在虚拟仪器中的实现[J].河南科技大学学报:自然科学版,2005,26(3):40-43.
[4] Li T H S,Tsai SH.T-S Fuzzy Bilinear Model and Fuzzy Controller Design for a Class of Nonlinear Systems[J].IEEE Trans Fuzzy Syst,2007,15(3):494-505.
[5] Zhang B Y,Zhou S S,Li T.A New Approach to Robust and Non-fragile H∞Control for Uncertain Fuzzy Systems[J].Information Sciences 2007,177:5118-5133.
[6] Kau SW,Lee H J,Yang CM,etal.Robust H∞Fuzzy Static Output Feedback Control of T-SFuzzy Systemswith Parametric Uncertainties[J].Fuzzy Sets and Syst,2007,158:135-146.
[7] Wang R J,Lin WW,WangW J.Stabilizability of Linear Quadratic State Feedback for Uncertain Fuzzy Time-delay Systems[J].IEEE Trans SystMan Cybe,2004,34(2):1288-1292.
[8] Ho W C,Niu Y.Robust Fuzzy Design for Nonlinear Uncertain Stochastic Systems via Sliding-Mode Control[J].IEEE Trans Fuzzy Syst,2007,15(3):350-358.
猜你喜欢
阜阳师范大学学报(自然科学版)(2022年1期)2022-04-02
数学年刊A辑(中文版)(2021年1期)2021-06-09
系统管理学报(2018年3期)2018-08-13
系统管理学报(2018年2期)2018-08-13
黑龙江电力(2017年1期)2017-05-17
山西大同大学学报(自然科学版)(2016年4期)2016-11-27
环境科技(2016年5期)2016-11-10
新高考·高一物理(2016年3期)2016-05-18
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19
系统工程学报(2015年2期)2015-02-28
