机载激光3D探测成像系统的发展现状
2011-05-11 05:13赵嘉鑫田海英李俊峰
中国光学 2011年3期
张 健,张 雷,曾 飞,王 旭,赵嘉鑫,田海英,任 航,李俊峰
(中国科学院长春光学精密机械与物理研究所,吉林长春130033)
机载激光3D探测成像系统的发展现状
张 健,张 雷,曾 飞,王 旭,赵嘉鑫,田海英,任 航,李俊峰
(中国科学院长春光学精密机械与物理研究所,吉林长春130033)
机载激光3D探测成像是通过激光主动成像产生目标的角-角-距、角-角-速度3D图像的一种新的探测成像技术。本文重点阐述了机载激光3D探测成像系统的原理、功能和系统的组成。介绍了该系统在军事和民用两大领域的应用,详细地讨论了近几年机载激光3D探测成像技术的国内外发展现状及动态,总结了该项技术的发展方向。认为国外的机载激光3D探测系统正向远距离、高分辨率、轻量化、低功耗、高实时性和人眼安全方向发展,而目前国内的相关研究仍处于实验室阶段,与国外相比还存在一定差距。文章最后以用户需求为例,从设计的角度对机载激光3D探测成像系统进行了分析,讨论了该系统在测距机制、扫描机构、探测器、数据处理和显示等方面的处理。
机载3D探测成像系统;激光探测;激光雷达;3D成像
1 引 言
激光探测成像是通过激光束对目标进行照射,目标的反射回波由探测器接收,通过信号处理获取目标至探测器的距离和速度等信息,进而获得区别于背景的距离图像和多普勒(速度)图像[1]的一种新型探测成像技术。机载激光3D探测成像系统即为利用激光进行探测成像的设备,该设备通过对地面目标进行主动成像与距离测量,产生含目标和景物的3D图像。由于该系统具有全天时工作、隐蔽性好、可紧凑和小型化以及伪装识别等优点,已广泛应用于军事侦察、长距离瞄准、大面积3D地形测绘、机器人导航、水下矿藏探测和自导引导弹等技术领域[2]。
本文首先分析了机载激光3D探测成像系统的原理、关键技术及应用情况,然后对国外近10年内在机载激光3D探测成像系统方面的发展现状及研究动态进行分析和总结,并指出该系统的发展方向。最后,系统地对机载激光3D探测成像系统的设计提出了一些可行的建议。
2 原理及关键技术分析
激光探测成像系统是一种利用激光光波探测目标位置的电子设备,它可以采用非相干的能量接收方式,主要是以脉冲计数为基础;也可以采用相干接收方式接收信号,通过后置信号处理实现相干探测[3]。

图1 机载激光3D探测成像系统原理图Fig.1 Mechanism chart of airborne 3D imaging lidar system
机载激光3D探测成像系统是一种在高敏感光探测器基础上发展起来的新技术,这样的探测系统能够测量出极小量的反射激光,并对所扫描到的物体实时进行3D建模[4]。图1所示为一种机载激光3D探测成像系统的原理框图,它主要由激光发射/接收光学系统、陀螺稳定平台、激光发射/接收系统、数据处理与显示系统和视轴稳定控制系统等5部分组成,其中激光发射/接收系统由激光器及其控制电路、探测器、计时电路等组成。机载激光3D探测成像系统通过机载导航系统确定空间位置和姿态,同时由激光发射和接收系统获取地面激光脚点到发射装置的空间距离和矢量方向,利用导航参数作为基准计算出地面点的地理坐标位置[4]。
国外激光探测成像技术从辐射源种类上可以分为3类:CO2激光成像探测、二极管泵浦固体激光探测成像和半导体激光探测成像。CO2激光探测成像系统的激光器为CO2激光器,由于其体积、成本及抗震性等方面的缺点,逐渐被后两种技术所替代。二极管泵浦固体激光探测成像系统采用高重复频率、高峰值功率的二极管泵浦固体激光器和高灵敏度的雪崩光电二极管/PIN(APD/PIN)探测器,大多采用直接探测方式,可实现高分辨率的距离成像。半导体激光成像探测系统具有体积小、重量轻、成本低、寿命长、可靠性高和功耗低等优点,它采用半导体激光器或半导体激光器阵列,探测器采用APD/PIN或APD阵列,大多采用直接探测方式,具有测距和目标3D轮廓成像功能[5]。
机载激光3D探测成像系统的工作过程如下:首先由激光控制单元控制激光器发射出激光脉冲,通过发射光学系统压缩激光光束的发散角后,根据测量点的密度,控制扫描镜摆动将激光脉冲射向地面目标。同时有极少量的激光能量,作为计时起始触发脉冲输送给激光接收系统。目标回波的激光脉冲经接收光学系统照射在探测器上,计时电路停止计时。这样,通过计算激光脉冲的飞行时间(Time of Flight,TOF)得到目标与系统之间的距离。同时根据INS/GPS系统和平台姿态得到目标的方位角和俯仰角,即可得到目标的角-角-距3D坐标。由数据处理与显示系统依据相应的算法,根据各测点的3D坐标,绘制出目标的3D图像,并实时显示出来。
机载激光3D探测成像系统作为一种主动成像设备,利用探测器感知回波信号得到与景物之间的距离信息,而得到的距离、姿态等数据信息需要通过处理才能得到3D图像。因此,光源、探测器和数据处理等是它的主要组成部分,这里对这些关键技术进行简要的分析。
机载激光3D探测成像系统的关键参数为脉宽、重复频率、激光头尺寸、单脉冲能量等。激光束脉宽决定了机载激光3D探测成像系统的距离分辨率,脉宽越小,距离分辨率越高。激光器重复频率的选择与机载激光3D探测成像系统的工作方式即扫描方式密切相关。一般来说,脉冲重复频率越高,地面测点密度越大,得到的3D图像的分辨率越高。激光器尺寸是另外一个重要的参数,因为机载激光3D探测成像系统要求紧凑、轻量和小型化,因此激光器的体积和重量都是越小越好。而单脉冲能量则越高越好,因该参数值越高,回波信号的能量就越大,可以满足长距离的探测要求。激光器波长主要考虑安全性,很多研究机构和公司都应用了对人眼安全的激光器。
机载激光3D探测成像接收系统的灵敏度取决于采用的探测技术和探测器件的灵敏度,其整体性能和探测器的输出噪声及输出信噪比密切相关。APD探测器具有带宽高、噪声小、动态范围大、具有电流增益和可靠性好等优点,是机载激光3D探测成像系统中最常用的探测器之一[6]。APD的材料通常基于 Si,GaAs以及 InGaAs。Si-APD适用于850 nm,后两种工作于1 300和1 550 nm波长。APD探测器阵列有线阵和面阵之分,国外面阵APD像素已经达到了128×128。美国麻省理工学院的林肯实验室目前已经开发出32×32APD阵列,工作于盖革模式,即APD接收单个光子产生的电子-空穴对就可以激发雪崩现象,产生一个大的电流脉冲。该APD阵列与快速的CMOS数字计时转换电路集成在一起,探测器单光子敏感度可以达到纳秒以下的计时精度。整个集成的APD/CMOS阵列是一个紧凑、低功率和全固态的模块。APD探测器阵列是发展激光3D探测成像技术的一项非常重要的关键技术,目前大面阵的APD探测器阵列国外均对中国禁运。
机载激光3D探测成像系统的另一个重要的性能指标是其运行速度,运行速度与实时性密切相关。为此,有必要配备合适的数据处理与显示系统以实时地显示3D图像。机载激光3D探测成像系统得到的数据为目标的角-角-距等信息,需要通过数据处理将角-角-距数据转换到笛卡尔坐标系中。该阶段可将数据存储到1D的哈希表中,每个3D像素的坐标对应唯一的寻址整数。由于在测量时间范围内,感兴趣空间中大部分的3D像素是空值,所以这种较为稀疏的数据结构非常适合于单个光子的计数。在接收到所有的测量脉冲后,所有非空的3D像素集合于哈希表中。由于APD存在噪声,因此,需要根据设定的阈值去除较小值的3D像素。在目标背景中,需要检测地面以作为目标的参考。该步骤完成后,在3D图像中形成了地面网格。由于APD的响应速度快,但衰减较慢,这会形成图像上的“余辉”。为增加信噪比,需要用去卷积算法抑制“余辉”效应,增强图像判读效果。
不难看出,对于机载激光3D探测成像系统的研制及指标提升主要在于关键技术上的突破,不仅需要致力于激光器和探测器技术的发展,开发可用于3D图像处理与显示的硬件和软件系统,还要考虑INS/GPS系统的性能以提高机载激光3D探测成像系统技术指标。
3 在军事及民用领域的应用
由于激光探测成像技术具有抗干扰及抗隐身能力强和较高的距离、角度和速度分辨率等突出优点,在军事和民用领域都有着广阔的应用前景。目前,部分激光探测成像系统已经投入使用,而有些仍处于实验室研制和探索阶段。
(一)机载激光3D探测成像系统在军事领域的应用
(1)用于侦察的机载激光3D探测成像系统
激光3D探测成像系统分辨率高,可以采集3D数据,如方位角-俯仰角-距离、方位角-俯仰角-多普勒速率等,获得距离图像、速度图像等,有潜力成为重要的侦察手段。1992年,美国海军开始了“辐射亡命徒(Radiant Outlaw)”工程。该系统利用一个强健、紧凑的机载传感器组件进行多模式识别,该传感器包含一个稳定激光探测成像系统,可以识别目标表面振动和微多普勒信号,得到距离图像,进行高分辨率主动激光3D探测成像,从而用于军事侦察[7]。最近,美国麻省理工学院林肯实验室研究的机载激光3D探测成像系统传感器可以穿透浓密的树叶,对隐藏其下和伪装的军事目标进行成像。因此,利用机载激光3D探测成像系统得到的3D图像对于军事侦察具有重大的意义。
(2)障碍回避机载激光3D探测成像系统
直升机近地飞行时,地物是直升机最严重的威胁,特别是电力线、铁塔、钢缆以及树木等低观测性目标[8]。障碍回避机载激光3D探测成像系统就是应用于直升机低空飞行防撞和躲避障碍的设备,利用激光主动成像,在任何照度下对直升机前面和下面的空间进行3D成像,从而提示直升机避开障碍和危险。美国Fibertek公司成功研制了用于直升机防撞的机载激光探测成像系统,其激光器为二极管泵浦固体激光器,波长为1.54 μm。从 1994年起,Fibertek公司已经在UH-1H直升机上进行了大量挂飞试验,成功实现了对障碍物的探测成像[9]。德国戴姆勒一奔驰宇航公司研制了Hellas障碍探测激光探测成像系统,视场为32°×32°,能探测距离为300~500 m、直径1 cm以上的电线和其他障碍物(取决于角度和能见度)[8]。
(3)大气监测机载激光3D探测成像系统
机载激光3D探测成像系统可以探测气溶胶、云粒子的分布,也可以进行大气成分、污染环境气体的探测,能对主要污染源、污染环境物的扩散以及沙尘暴过程等进行有效监控。在高空投掷炸弹和其它兵器时遇到的一个问题是,风干扰向下的弹道。美国空军器材司令部进行的弹道风计划,利用机载激光3D探测成像系统实时提供投掷区风场的信息,以便通过调整投掷点来补偿风的影响。该计划的目标是测量飞机和地面间的实时3D风场图,从而允许从3 000 m以上的高空精确投掷。据称,作战用机载激光3D探测成像系统须将硬件小型化,可使空投精度提高2倍以上。机载激光3D探测成像系统探测紊流阵风的能力,可以为未来的军用和民用飞机提供更好的阵风缓和系统[10]。
(4)制导机载激光3D探测成像系统
激光制导又称激光波束制导,有着广泛的应用前景,可用于地-空、空-空、地-地导弹等多种类型的导弹制导[11]。目前,利用机载激光3D探测成像系统的主动激光寻的制导已成为各国研究的热门。美国陆军正在研制的“网火”武器系统中的巡飞攻击导弹(LAM),装有能够自动确认目标的主动激光探测成像导引头,能够连续扫描直径500~600 m,分辨率达150 mm,使得LAM在飞行高度230 m、飞行速度400 km/h时还能自动辨认目标[12]。
(5)水下探测机载激光3D探测成像系统
利用蓝绿激光在水中传输窗口效应,从机载平台上对水下目标快速探测、定位和成像的激光探测成像系统已经开始装备部队。由于波斯湾战争的需要,美国 Kaman公司研制发展了 Magic Lantern激光探测成像系统,安装在SH-2F直升机上,它能够在140~320 m的海上高度运行,当发现水雷信号时,可以成角-角-距图像,并在显示屏上显示,最终通过该系统配置的一个终端破坏装置将水雷破坏。水下激光探测成像系统也可以装在无人潜水器中,美国海军在20世纪90年代中期研制出一种可装在无人潜水器中的LVIS水雷目视激光识别系统,该系统识别距离为12 m,可进行行扫描成像[13]。
(二)机载激光3D探测成像系统在民用领域的应用
机载激光3D探测成像系统在民用领域也有着非常重要的应用。在地形测绘方面,机载激光3D探测成像系统可以直接获取高精度的3D信息,能全面反映地表信息,同时能够对大范围、沿岸岛礁海区、不可进入地区、系数植被下层进行探测成像。在森林资源勘察方面,机载激光3D探测成像系统可以高精度地提供森林水平和垂直的信息,可以为森林调查和经营管理提供诸如大范围森林高度、林下地形和截面垂直分布的直接测量数据。另外,机载激光3D探测成像系统在海洋勘探、灾害管理、大气环境监测和考古学等方面都有着非常重要的应用。
综上所述,无论是在军事还是民用方面,机载激光探测成像设备都发挥着极其重要的作用,应用前景广阔,因此,许多国家都在竞相发展这项技术。
4 发展现状及动态
机载激光3D探测成像系统的先进技术主要集中在美国和欧洲部分发达国家。最近几年,其发展主要体现在激光器、探测器件、数据处理算法和电路等方面。
4.1 美国机载激光3D探测成像系统的发展现状
美国麻省理工学院的林肯实验室(MIT Lincoln Laboratory)很早就致力于激光探测成像技术的研究。其最早的激光探测成像系统为高功率、长距离的Firepond(火池)激光探测成像系统,它可用于太空目标监视和弹道导弹防御等战略军事领域。林肯实验室从1975年开始研究机载激光3D探测成像系统,代表成果为红外机载雷达系统(Infrared Airborne Radar System,IRAR)[14]。

图2 机载IRAR系统及所成图像Fig.2 Airborne IRAR system and its applications to imaging
IRAR系统发展经历了技术发展和实验室论证、车载系统测试以及飞行测试3个阶段。在飞行试验中,IRAR系统安装在Gulfstream G-1飞机上,如图2(a)所示。机载系统对一个飞机库进行了被动红外、激光距离和激光强度成像,如图2(b)所示,其中激光距离图像的测距精度为1 m。机载IRAR系统利用其前视激光探测成像系统对Bourne大桥进行成像,得到绝对距离值,则距离像可以转换到任意的视角,因此创意地提出多维图像处理,得到3D甚至更多维度的图像。Bourne大桥的3D前视图如图3所示,图中的插图为转换得到的大桥俯视图。这个阶段系统的激光器为CO2激光器,采用主动和被动HgCdTe探测器阵列。随着研究的进展,研究者开始对机载IRAR系统工作在垂直于或接近垂直于地面的视角感兴趣,实现了利用高角度和距离分辨率的激光探测成像系统穿透树叶和伪装进行成像以及对垂直打击的武器进行制导。因此,人们发展了GaAs激光器和Nd∶YAG激光器的俯视IRAR系统,俯视距离约为100 m,空间分辨率为15 cm,测距精度也为15 cm。基于GaAs激光器的机载IRAR系统的相对距离精度为15 cm,系统对伪装下的坦克进行成像,得到的角-角-距3D图像如图4所示。由于GaAs系统无法穿透高度高的树林,林肯实验室发展了基于Nd∶YAG微芯片激光器的绝对测距激光探测成像系统,距离精度为15 cm,并发展了实时处理器[14]。综上所述,IRAR系统经历了CO2激光器、GaAs激光器和Nd∶YAG微芯片激光器3个阶段,主动探测器为HgCdTe探测器阵列,距离精度达到了15 cm。

图3 Bourne大桥的3D前视图及俯视图Fig.3 3D forward and overhead views of Bourne bridge

图4 伪装坦克的照片及角-角-距3D图像Fig.4 Visible-light photograph and angle-angle-distance image of a camouflaged tank
为了使机载激光3D探测成像系统具有在单激光脉冲下捕获景物的完整3D图像,并具有成千上万的像元、体积小、重量轻、功耗低等特性,林肯实验室积极发展激光器和探测器技术。激光器技术基于被动Q开关泵浦二极管固态微芯片激光器;探测器技术基于林肯实验室开发的盖革模式APD阵列,每个像元都集成了计时电路[15]。

图5 林肯实验室实验性激光探测成像系统Gen-ⅠFig.5 Experimental imaging lidar Gen-Ⅰ in Lincoln Laboratory
林肯实验室首先研制了一个车载激光3D探测成像系统Gen-Ⅰ。激光器为微芯片激光器,激光波长为532 nm,脉冲重复频率为1 kHz,单脉冲能量为30 μJ。探测器为4×4盖革模式APD阵列,外部计时电路,通过测量每个像元TOF的方法得到与目标之间的距离。在高探测概率的情况下测得单像素距离精度为2.0 cm。该系统的光学头及光学系统示意图如图5所示。系统具有一对单轴扫描镜,它们指引4×4 APD阵列的视场达到更大的面积,以产生32 pixel×32 pixel(帧频为4.5/s)或128 pixel×128 pixel(帧频为0.6/s)的目标图像。接收光学系统的变焦透镜允许像元视场在0.2~2 mrad之间变化。整个Gen-I系统被安装在一个汽车上,并在室外进行了成像试验,其中对Chevrolet Astro面包车所成的3D图像如图6所示[15~17]。

图6 Gen-Ⅰ系统所成的3D图像Fig.6 3D image produced by Gen-Ⅰ system
紧接着实验室又研制了第二代机载激光3D探测成像系统Gen-Ⅱ。Gen-Ⅱ系统的光学系统及机械结构如图7所示。Gen-Ⅱ系统由一个波长为532 nm的放大倍频微芯片激光器激发一个钛-蓝宝石激光器(长度为25.4 mm),产生波长为800 nm的激光。最初的激光器性能规格要求脉冲重复频率为8~10 kHz,单脉冲能量为20 μJ,通过增加激光放大器使激光器输出单脉冲能量升级到150 μJ。接收光学系统设计允许激光波长在800 nm~1.5 μm之间变化,这将允许升级后的系统可以工作在1.06 μm的波长下,在这个波长下APD阵列具有很好的敏感性。像元视场达到了250 μrad,且可工作于几千米以外。系统包含一个两轴扫描镜,视场角超过±20°。Gen-Ⅱ系统使用32×32全集APD管阵列,即与计时电路集成在一起,像元间距为100 μm,每个像元激活面积的直径为30 μm。为了使返回信号集中于探测器每个像素的激活区域,在探测器阵列前面集成安装了32×32小透镜阵列。在数据采集和处理方面,也随着Gen-Ⅰ系统不断发展,已经证明系统在极低的信号水平下可对隐蔽目标产生高质量的3D图像的光子计数的效果[15]。

图7 Gen-Ⅱ激光探测成像系统Fig.7 Gen-Ⅱimaging lidar system

图8 加强版激光3D探测成像系统Fig.8 Promotional 3D imaging lidar system
在发展Gen-Ⅰ和Gen-Ⅱ系统的同时,林肯实验室还集成了一个加强版的机载激光3D探测成像系统。该系统采用32×32 Si-APD阵列作为接收器,不再需要小透镜。激光器采用工作波长为532 nm的倍频微芯片激光器。该加强版系统的发射光束经扩束后被分为32×32细束,这样分离的目的是与接收器像元视场相匹配。系统扫描镜也是一个两轴扫描镜。该系统的总重量约为9 kg,系统结构如图8所示[15]。发展该加强版系统的直接目的是减小尺寸和降低阵列读出电路的功率需求和激光器驱动功率。在加强版系统基础上,林肯实验室研制了第三代机载激光3D探测成像系统Gen-Ⅲ。Gen-Ⅲ系统采用脉冲重复频率为5~10 kHz的被动Q开关固态倍频Nd∶YAG微芯片激光器,工作波长为532 nm;探测器采用工作于盖革模式的32×32 APD阵列,像素间距为100 μm,与COMS计时电路集成在一起,CMOS时钟频率为 500 MHz。Gen-Ⅲ系统光学设计参数如表1所示。光学系统及机械结构如图9所示,整个传感器的尺寸为20 cm×20 cm×22 cm,重量约为6 kg。由Gen-Ⅲ系统对距离500 m处一个坦克成像得到的3D点云图如图10所示。林肯实验室还进行了树叶穿透能力试验,由其给出的图像可以看出,Gen-Ⅲ系统能够对隐蔽在浓密树林中的目标进行成像,具有重要的军事意义。对于机载激光3D探测成像系统未来的发展,文章中指出:增大焦平面阵列的像元尺寸,如128×128;发展Ⅲ-Ⅴ族材料的盖革模式APD阵列,以响应更长波长的激光,如波长在1 500 nm左右对人眼安全的激光;提高激光脉冲的能量;整个机载激光3D探测成像系统能更小更轻(低于1 kg)等等[18]。

图9 Gen-ⅢLADAR试验台光学系统示意图及实物图片Fig.9 Sketch of optical system for Gen-Ⅲ airborne 3D imaging lidar system and its entity figure

表1 Gen-Ⅲ系统的光学设计参数Tab.1 Optical design parameters for Gen-Ⅲsystem

图10 距离500 m处一个坦克的3D图像Fig.10 3D image of a tank at distance of 500 m
表2对林肯实验室的三代机载激光3D探测成像系统(包括加强版系统)性能进行了对比。通过对比可以看出,在激光器方面,林肯实验室一直在发展微芯片激光器,不断地提高其单脉冲能量和脉冲重复频率等指标;探测器为工作于盖革模式的APD阵列,不断地增大其像元,并将计时电路集成于其上;值得注意的是在这几代产品中光学系统的变化:在Gen-Ⅱ系统中,为了使回波信号能集中于每个像元的激活区域,在探测器前面集成了一个32×32的小透镜阵列,而在加强版和Gen-Ⅲ系统中则利用激光发射光学系统中的衍射分光镜将扩束后的激光束分成32×32细光束阵列,从而高效地照亮32×32APD阵列每个像元各自的视场,与32×32小透镜阵列相比,该方法照明照度包含更好的几何耦合,减少背景杂光干扰,提高角分辨率;在重量上,林肯实验室研制机载激光3D探测成像系统的趋势是重量更轻,结构更紧凑。对于距离分辨率指标,Gen-Ⅲ系统 达到了15 cm。

表2 林肯实验室三代机载激光3D探测成像系统性能对比Tab.2 Performance contrast among three 3D imaging lidar systems in Lincoln laboratory

图11 JIGSAW系统结构图Fig.11 System structure of JIGSAW system
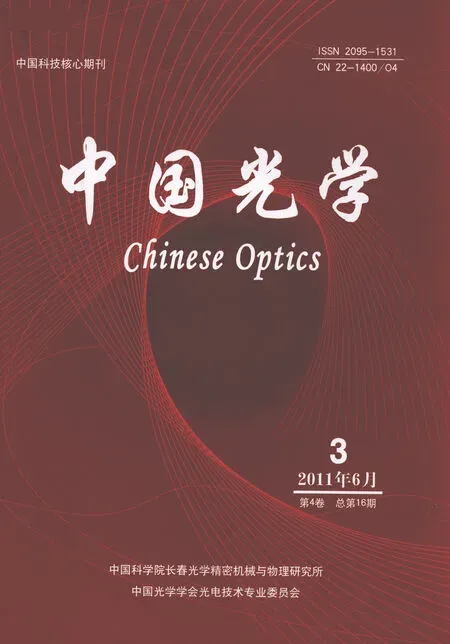
美国国防部高级研究计划局(DARPA)等部门正在进行一种高分辨率成像和高隐蔽目标识别的小型机载激光3D探测成像传感器(JIGSAW)的开发。JIGSAW系统最大的优点是对极度模糊的目标具有高分辨率成像与识别功能,能够收集隐藏在浓密森林中地面目标的多角度、高分辨率的3D图像,并能够把隐藏的有威胁的目标图像提供给地面的指挥官。林肯实验室主要负责JIGSAW机载激光3D探测成像系统传感器部分的研制。该传感器主要由以下几部分组成:短脉冲被动Q开关倍频固态Nd∶YAG微芯片激光器,平均工作功率为0.25 W;盖革模式32×32单光子计数硅APD阵列,单光子探测效率>20%,它与高速CMOS读出集成电路桥键连接;平台是有着精确地理信息的30 cm(12 in)万向节系统(集成有GPS/INS);自动化的传感器和智能遥控电子设备和软件;专用机载处理器,可提供近实时的数据收集和3D点集数据处理及存储能力;高带宽RF数据通信无线电设备;用于平台/传感器控制的地面模块控制站;状态监视;3D成像视觉及开发系统。各模块之间的逻辑关系如图11所示。JIGSAW传感器参数如表3所示。JIGSAW系统总重为45 kg,传感器的重量为13.6 kg,是一个模块化的系统,可以安装在有人机和无人机上。该系统集成在载人UH-1直升机上进行了飞行试验,对多种浓密树叶遮蔽和伪装的军事目标景物进行了成像,所成图像中这些目标均能很容易地被识别。图 12为地面试验中 JIGSAW 系统对距离150m处的各种静态校准目标所成的3D图像;图13为飞行试验中对一个军用卡车所成的3D 图像[2,19]。

图12 JIGSAW系统对距离150 m处的各种静态校准目标所成3D图像Fig.12 3D images from JIGSAW system for several kinds of static adjustment targets at distance of 150 m

表3 JIGSAW传感器系统关键参数Tab.3 Critical parameters of JIGSAW sensor system
图13 飞行试验中JIGSAW系统对一个军用卡车所成的3D图像Fig.13 3D image from JIGSAW for a military truck in flight test
由于气溶胶的遥感有很多商业和防卫应用,如放射物监视或生物战剂的探测,为了调查光子计数激光探测成像系统对薄的或低密度气溶胶云进行远距离探测和成像的敏感性和有效性,林肯实验室开发了一个可移动主动成像激光探测成像系统 (MobileActiveImagingLIDAR system,MAIL)。该系统的激光器为被动Q开关倍频固态Nd∶YAG微芯片激光器,脉冲重复频率为14~16 kHz,平均输出功率低于64 mW;探测器为工作于盖革模式的32×32 APD二极管探测器阵列,用于单光子计数和测距。该系统传感器的关键参数与JIGSAW完全相同,如表3所示。传感器紧凑、强健,最大的优势是对功率孔径积的需求减少了多于一个数量级。MAIL系统如图14所示。MAIL传感器是为了从一个低空机载平台上对硬目标进行成像而设计和发展的,然而,它在论证对气溶胶释放的高分辨率空间-时间的成像时工作得非常好,已经论证了探测和跟踪少量气溶胶的能力[20]。
在数据处理与显示方面,林肯实验室已经开发了一种能够实时产生、显示和分析机载激光3D探测成像系统数据的图像处理原型系统。采用了一系列新颖算法将粗糙的数据转换成清晰的3D图像。这些算法能够降噪、进行地面识别、探测器响应反卷积和照明模式再归一化。该系统同样能够在屏幕上将静态目标从动态目标中区分开来。为了达到信息的实时处理,研究人员将这些算法在一个Linux集群中并行处理,论证了将图像生成算法、多处理器通信软件和集群计算硬件结合在一起的方法具有产生可操作的实时3D成像能力。此外,还讨论了未来工作的发展方向,包括自动识别移动的人、在机载平台上的实时探测以及机载激光3D探测成像系统和视频成像的结合等等[21]。

图14 可移动主动成像激光探测成像传感器系统Fig.14 Mobile positive imaging lidar sensor system
美国空军研究实验室(AFRL)军需品部研究和发展机载激光3D探测成像系统传感器和自导引导弹接近25年之久,最近成功完成了3D-LZ(Landing Zone)直升机机载激光3D探测成像系统的飞行测试论证。3D-LZ传感器的成像和显示系统可以在直升机接近、着陆和离开盲视环境时为飞行员提供高保真度的图像。3D-LZ机载激光3D探测成像传感器由1.5 μm纤维激光器、多边形扫描器、InGaAs APD光学接收器、彩色数字照相机和距离计数电路等部分组成。该传感器装在万向支架上,在万向支架上装有光纤陀螺惯性测量单元。3D-LZ传感器的能视域为方位角方向60°,俯仰方向30°。方位线扫描率为150 line/s,产生150 000/s测量点的净持续信息率;俯仰扫描角速率为150 mrad/s,产生在方位和俯仰方向上均为1 mrad的等价扫描间隔。因此,一个完整的60°×30°的扫描共有1.5×106pixel。多处理器控制的距离计数电路子系统包括一个数字激光脉冲飞行时间距离计数器、多边形扫描器和万向支架控制系统以及真彩色化功能模块。3D-LZ系统结构框图如图15所示。3D-LZ系统最大工作距离约为61 m,距离精度为1 cm。3D-LZ系统集成安装到EH-60黑鹰直升机上,于2009年6月进行了第一次飞行测试,如图16所示。测试中在几乎100%灰尘阻碍环境下成功地在贯穿整个着陆和起飞过程中为飞行员提供了连续的图像。这些结果非常有前景,而且奠定了机载激光3D探测成像系统在应对直升机盲视环境下为首要技术方案的地位,下一步将增加系统的“透视”能力,并增加一些诸如电缆探测和报警等附加特征[22,23]。

图15 3D-LZ机载激光3D探测成像系统框图Fig.15 Frame of 3D-LZ airborne 3D imaging lidar system

图16 3D-LZ探测成像系统在黑鹰直升机上Fig.16 3D-LZ imaging lidar system on Black Hawk helicopter
自从 1996年以来,美国部队工程师军团(USACE)开展了一系列关于海岸线探测的激光探测成像系统的研究,并为此成立了联合机载激光探测成像海洋测量专业技术中心(JALBTCX)。海防测绘和成像激光探测成像系统(Coastal Happing and Imaging Lidar,CZMIL)是最近几年专门为USACE的国际海岸线绘图项目所设计的新一代机载绘图系统,该系统可在产生海滩和浅水海底高分辨率3D图像的同时完成海底分类和水柱描述。CZMIL系统的数据获取系统由机载激光3D探测成像传感器、商用成像光谱仪和商用数字量测摄影机3部分组成。由于CZMIL系统的数据采集频率很高(高达70 kHz),需要开发一个紧凑、高能量、短脉冲长度和高重复频率的激光器,该绿光激光器增益介质为Nd∶YVO4,脉冲持续时间接近2 ns,重复频率为10 kHz。系统所需激光波长为1 064 nm和532 nm,532 nm激光束的输出脉冲能量为3.0 mJ。CZMIL希望能够综合机载激光3D探测成像系统和图像传感器,产生高度自动化的浅海探测信息产品。CZMIL将改造现有的硬件和软件,以解决浊度和浅水现有系统的局限性,提高数据的环境应用,充分利用先进的激光、扫描仪和接收器技术、信号处理和数据融合算法,同时保持准确的深度测量能力。CZMIL系统的一些关键需求如表4所示。CZMIL的制造在2010年完成,2011年开展了现场试验[24,25]。

表4 CZMIL的关键需求Tab.4 Critical demands of CZMIL
美 国 Advanced Scientific Concepts, Inc.(ASC)致力于与增强成像和其应用相关的工程技术研究。目前,该公司的主要产品为3D闪光激光探测成像传感器和相机。ASC的闪光激光探测成像系统可以穿过尘土、雾、烟或其它模糊状况进行成像,在任何照度情况下可以对距离为5 cm~5 km的景物进行成像。如今,基于ASC专利技术的3D摄像机利用单个激光脉冲即可捕获全帧(128 pixels×128 pixels)3D点云数据,高达60 frame/s。ASC共有3种3D闪光激光探测成像系统:DragonEye,TigerEye和便携式。DragonEye空间相机是一个轻量、小尺寸的系统,TigerEye是一个小尺寸的集成3D闪光激光探测成像摄像机,它又有 TE-2809-PC、TE-2845-PC和 TE-2445-PC等几个系列。DragonEye和TigerEye的一些基本参数列于表5中,通过表5可以看出,ASC公司的机载激光3D探测成像系统的探测器采用InGaAs APD阵列,达到了128 pixel×128 pixel,激光为Ⅰ类视觉安全激光,视场大、结构紧凑、体积小、重量轻。

表5 DragonEye和TigerEye的基本参数Tab.5 Basic parameters of DragonEye and TigerEye
4.2 欧洲机载激光3D探测成像系统的发展现状

表6 着陆应用的机载激光3D探测成像传感器的性能要求Tab.6 Performance requirements of detection lidar in airborne laser 3D imaging system for landing applications
为了为火星探测做准备,欧洲航天局(ESA)将激光3D探测成像技术作为可预见性的重要技术之一,它可以为宇宙飞船制导、导航和控制系统提供重要的信息。欧洲航天局与两个工业团队签订了合同分别发展和论证着陆应用和交汇与对接应用的激光3D探测成像传感器技术,目前均处于加工和测试阶段。着陆应用的机载激光3D探测成像传感器的性能要求如表6所示。该激光3D探测成像试验台采用TOF测量方法,由激光器、光学系统、扫描系统、探测器和控制电路等组成。其中激光器重复频率为12 kHz,激光波长为532 nm。探测器为带有典型TOF读出集成电路的1×256硅单光子APD阵列。扫描系统的扫描镜具有两轴运动,由一个常平架结构的镜架支撑。数据处理的一个重要特征即使用超分辨率网格方法,可以实时处理设备生成的海量数据。试验台由铝制成,系统目前质量为8 kg,未来版本质量将为6kg。系统的功能框图如图17所示,在框图中,较为有特点的是光学系统的结构设计。其中,激光接收系统采用的是一组变焦镜头,它对无穷远到1 m距离内成像像质都很好。变焦镜头结构紧凑,其与探测器距离很近,非常方便集成在一起。接收系统的口径限制在50 mm,这对于探测距离为5 000 m的情况已经完全够用,在变焦镜头前放有一个带宽为1 nm的干涉滤波器,主要是为了屏蔽掉背景返回的光子。用于交汇与对接应用的激光3D探测成像试验台的性能估计如表7所示。该试验台也是基于TOF测量方法,采用了包括纤维激光器的单通道激光测距仪,探测器采用InGaAs APD,共轴发射/接收光学系统,扫描系统也采用具有方位和俯仰扫描方向的常平架安装的扫描镜。在未来的空间应用中传感器质量可能低于7 kg,功率损耗低于45 W[26]。

图17 着陆应用的机载激光3D探测成像系统功能框图Fig.17 Function frame of 3D imaging lidar system for landing

表7 交汇与对接应用的激光3D探测成像传感器的性能估计Tab.7 Performance estimation of imaging lidar system for rendezvous applications
瑞士Leica Geosystems公司Leica ALS系列激光3D探测成像传感器是市场上发展最快的激光3D探测成像传感器。ALS系列产品有ALS40,ALS5 0,ALS 6 0和ALS道路测绘仪等。Leica ALS50-Ⅱ系统是ALS50系统的第二代产品,其进行了如下改进:脉冲重复频率为150 kHz,系统精度可达到11 cm(包括GPS误差);飞行高度限值为地平面以上 200~6 000 m,扫描速率高达90 Hz;集成了IPAS GPS/惯性测量工具;体积减小54%,质量减少33 kg,可靠性提高。最新产品ALS60是一个可以从各种机载平台上获取地形和回波信号强度数据的激光3D探测成像系统,典型配置如下:二极管泵浦激光器;28 V直流电源供应;大孔径、小惯量、高速扫描镜,标准扫描镜是为距地面5 000 m高空使用而设计的,视场角为75°;4个距离计数电路板;回波信号强度/自动增益控制(AGS)设定捕捉卡;集成扩展图像阵列分辨率(1 280 pixel×1 024 pixel)数字照相机,能自动进行数据注释。ALS60后处理之后产生的数据横向位置精度为7~64 cm,垂直位置精度为8~24 cm。系统总重量(最大值)为103.7 kg。2010年10月,Leica Geosystems公布了点密度倍增技术飞行试验成功的消息,该新奇的扫描系统使用单个激光器和扫描机构获得以前系统2倍多的数据采集能力。这项新技术将集成到ALS系列机载激光3D探测成像系统中。
奥地利Riegl公司对激光扫描成像设备的设计、发展和生产有着30年的经验,其机载激光3D探测成像系统使用了最新发展的最先进的激光器和信号处理技术,非常紧凑、重量轻且性价比高,均满足在航空测量中最具挑战性的需求。该公司机载激光3D探测成像系统有LMS-Q240i,LMSQ560,LMS-Q680i,LMS-VQ480和LMS-VQ580等型号,这里主要介绍其最新的两款产品 LMSQ680i和LMS-VQ580。LMS-Q680i是一款机载长距离激光3D探测成像系统,可以对无限数目的目标回波进行全波形分析,允许在高度变化的状况下操作,因此适宜于复杂地形的航空测量。该设备可以安装在单发动机或双发动机飞机、直升机和无人机上。LMS-VQ580是V-系列机载激光3D探测成像系统,利用一个窄的近红外激光束和快速线扫描机构提供高速、非接触数据获取。LMS-VQ580是一个紧凑、轻量化的设备,可以以任意的方向甚至在空间受限的条件下安装在直升机或无人机上,且只需一个电源。LMS-Q680i和LMS-VQ580的技术特征列于表8中,由表8可以看出,Riegl公司生产的机载激光3D探测成像系统的最大特点即激光器脉冲重复频率非常高,因此地面测点数目多,可以得到信息量更大、分辨率更高的3D图像。

表8 LMS-Q680i和LMS-VQ580的技术特征Tab.8 Technique parameters for LMS-Q680 and LMS-VQ580
德国TopoSys公司激光探测成像系统主要有以下几个型号:FalconⅠ,FalconⅡ,FalconⅢ,Harrier 56和Harrier 24。FalconⅡ是TopoSys发展的机载系统,传感器中还含有被动红绿蓝/近红外(RGB/NIR)线扫描成像传感器。FalconⅢ是最新的高端机载激光3D探测成像系统,为需要高密度和高可靠性高度模型的应用而设计,可应用于3D城市模型和城市规划、森林存量、水利仿真、洪水防护和道路测绘。HARRIER 56和HARRIER 24是分别集成了Riegl公司生产的LMSQ560、LMS-Q240激光探测成像传感器和一个数字照相机的设备。表9给出了FalconⅡ和FalconⅢ系统的一些技术参数。TopoSys在FalconⅢ系统中使用一个玻璃光纤扫描器,在光纤扫描器中,激光通过一个线性排列的玻璃光纤束指向地面,其回波由具有相同设计的另外一个线性排列的玻璃光纤束接收。图18为光纤扫描器的工作原理图。

表9 FalconⅡ和FalconⅢ的技术参数对比Fig.9 Contrast of technique paremeters for FalconⅡand FalconⅢ

图18 光纤扫描器工作原理Fig.18 Operating principle of a fiber scanner
2008年瑞典Folke Isaksson等人利用立体摄影技术,并采用帧间快速匹配算法进行机载对地3D测量,探测路径及得到的3D效果图如图19所示。载机以100 m/s的速度在500 m的高空处飞行,其得到的3D图像的空间分辨率为0.1 m,距离分辨率为0.2 m[27]。
以上为国外近10年机载激光3D探测成像系统技术的发展现状,有一些机载激光3D探测成像系统设备已经进入实用阶段,发挥着重要的作用。可以看出,国外的机载激光3D探测成像系统朝着紧凑型、轻量化、小型化、低功耗、高分辨率、高可靠性、高实时性、大焦平面阵列像元尺寸、高灵敏度探测器件、远距离探测、高脉冲能量的小型激光器、人眼安全和多功能化等方向发展。

图19 机载立体摄影的探测路径及得到的林区3D效果图Fig.19 Detecting path for airborne stereo and 3D effect figure
5 设计考虑与建议
通过近几年机载激光3D探测成像系统的发展可以看到,国外正在大力发展该项技术,测距精度都在厘米级,如用于直升机盲视的3D-LZ机载激光 3D探测成像系统的测距精度已达到1.0 cm。在设计机载激光3D探测成像系统时,需要考虑的因素很多,本文从系统设计角度对其进行了分析。
从用户的需求考虑,一方面是要求系统测距精度要高;另一方面是图像覆盖的范围广和图像的分辨率要高;其次,用户也希望系统能够结构紧凑、质量轻。下面针对某用户提出的指标进行分析,主要性能指标如表10所示。

表10 某机载激光3D探测成像系统主要性能指标Tab.10 Key indicators of an airborne 3D imaging lidar system
从测距体制来分,激光3D探测成像系统可以分为直接探测方式和相干探测方式两类,相干探测对激光器的相干性要求比较高,如前文介绍,目前用直接探测方式的比较多。对于直接探测的测距体制,主要包括脉冲激光测距和连续波激光测距两种。脉冲激光测距通过测量激光脉冲飞行时间计算目标到接收机的距离;连续波激光测距通过测量发射的调制激光束和接收的调制回波信号之间的相位差来获得目标点距离。连续波激光测距可获得较高的测距精度,但存在测距时间长和作用距离近等缺点[6],因此,机载激光3D探测成像系统多采用脉冲激光测距体制。
对于脉冲激光测距体制的机载激光3D探测成像系统,其测距精度与总体的时间测量误差、视轴稳定精度和光学系统等因素有关。总体时间测量误差与探测器连接的计时电路有关,主要包括两个方面,即时刻鉴别误差和时间间隔误差,目前,时刻鉴别误差可以达到ns以下的精度,时间间隔测量误差可以达到ps级[6]。对于单元探测器,一般都配有后续计时电路,也可以自行设计,通过选择适当的方法设计计时电路可以达到分米级到厘米级的精度。对于面阵和线阵APD探测器阵列,均依赖国外进口,部分配有计时电路,但大像素的APD阵列国外对中国禁运。视轴稳定控制也影响测距精度,视轴稳定精度高则实际测点偏离理想测点的程度就小。综上,对于表10中的测高精度1 m是可以满足的。
为了得到大范围、高分辨率的3D图像,机载激光3D探测成像系统需要利用激光扫描器。目前激光扫描器主要有4种:光栅扫描、声光扫描、电光扫描和光机扫描[6]。国外的机载激光3D探测成像系统的扫描方式多采用光机扫描方式,一般利用光学扫描元件的摆动或转动来实现激光束的发射或接收。表10显示,测高密度为2 m× 2 m(即在2 m×2 m的范围内要有一个测点),根据扫描宽度240 m和航速100 m/s,可以计算得测高频率为6 kHz,即激光器脉冲重复频率最小为6 kHz(一般根据要求的数据重合率,再对激光器的脉冲重复频率进行计算和选择)。这是激光器选择的一个重要指标,此外还要考虑到单脉冲能量等指标,这与后续的光学系统设计有关。对于摆镜结构,若地面测点的分布要求均匀,一般采用两轴的扫描镜结构,以补偿飞机飞行速度的影响。在本系统中,如果采用单个像素的探测器,计算可知摆镜的摆动频率太高,受到惯量的限制达不到该测高密度要求,因此需要考虑线阵或面阵的探测器。如果采用转镜作为扫描元件,由于连续旋转不存在摆动频率限制等问题,可以考虑其可行性,对转镜结构需在体积和重量上给予限制。机载激光3D探测成像系统的扫描范围与扫描元件摆动范围、飞行高度等因素有关,需要结合系统的机械结构和光学设计综合考虑。为了得到分辨率高的3D图像,增加地面测点的密度是一个很好的办法。根据探测器的不同其所能探测的地面测点密度的水平有着较大差别。
机载激光3D探测成像系统探测器的选择要与激光器波长匹配,以保证对回波信号的敏感性。探测器一般为APD,APD有单元APD、线阵APD和面阵APD。采用单元APD每次只能探测一个像素,结合光学系统设计,该种系统也可以得到较高的物方分辨力。由于扫描镜的摆扫速度不能太快,进一步提高地面测点的密度已十分困难,除非采用降低飞行速度等方法。而采用线阵APD或面阵APD探测器阵列,单次可以探测更多的测点,可以增加地面测点的密度,得到高分辨率的3D图像。但采用线阵或面阵APD,一方面单次探测的测点增多,需要将激光束进行分光或采用其他办法将激光照射到地面目标上,同时回波信号还要与探测器的相应像元相对应,这对光学设计提出了要求;另一方面,由于线阵或面阵APD像元数目多,而每个像元要集成计时电路,这方面的关键技术目前国内还未掌握。在信噪比方面,线阵和面阵APD的要求也要比单元APD高了很多。目前国外面阵APD已经做到了128×128阵列,将发射的激光束分成128×128细束从而使这些激光束的回波信号与探测器的每个像元对应。探测器的选择还要配合光学设计,好的光学系统可以使机载激光3D探测成像系统得到更高质量的图像。同时,在利用面阵APD探测器阵列时,每一帧图像之间要考虑重叠率的问题,保证每帧之间有一定的重叠,从而保证探测时不会出现测点的丢失。
在数据处理与显示方面,需要对INS/GPS系统的数据、陀螺、编码器和计时电路所得到的数据进行处理,得到测点的角-角-距信息,从而拟合成图像在屏幕上显示出来。数据处理与显示时间做到与测量时间比例为1∶1对硬件和软件要求都很高。考虑到该系统的数据量较大,可以先将数据进行实时存储,再通过数据处理将角-角-距3D图像在机上或地面准实时显示出来。
在设计机载激光3D探测成像系统时,还需要考虑到整体的尺寸和质量,尽量做到轻量、紧凑。同时,还要考虑到热控方面的问题,以保证整机的性能。热控的两个主要方面即激光器和探测器阵列,应尽量在结构设计时就将热控相关问题考虑其中。
6 结束语
机载激光3D探测成像系统被公认为目前最有潜力的复杂背景下的目标探测方式。本文较为详细地介绍了机载激光3D探测成像系统的原理与应用情况,通过分析近几年国外该系统的发展动态,可知国外的机载激光3D探测成像系统正朝着远距离、高分辨率、轻量化、低功耗、高实时性和人眼安全等方面发展。结合一个用户需求的机载激光3D探测成像系统的指标对该系统进行了系统设计考虑,讨论了该系统在测距机制选择、扫描机构、探测器选择和数据处理与显示方面的一些问题。目前国内的相关研究仍处于实验室阶段,与国外存在着一定的差距,还需要攻破一些关键技术。可以肯定,在不久的将来,机载激光3D探测成像系统在军事和民用两大领域都会发挥重大的作用和优势。
[1]王春晖,王骐,尚铁梁.长波红外激光成像雷达技术的研究进展[J].激光与红外,2001,31(3):133-135.WANG CH H,WANG Q,SHANG T L.State of the art of long wave infrared laser imaging radar[J].Laser Infrared,2001,31(3):133-135.(in Chinese)
[2]VAIDYANATHAN M,BLASK S,HIGGINS T,et al..Jigsaw phaseⅢ:a miniaturized airborne 3-D imaging laser radar with photo-counting sensitivity for foliage penetration[J].SPIE,2007,6550:65500N-1-65500N-12.
[3]戴永江.激光雷达原理[M].北京:国防工业出版社,2002.DAI Y J.The Principle of Lidar[M].Beijing:National Defence Industry Press,2002.(in Chinese)
[4]章大勇,吴文启,吴美平.机载激光雷达系统标定方法[J].光学精密工程,2009,17(11):2806-2813.ZHANG D Y,WU W Qi,WU M P.Calibration technology of airborne lidar[J].Opt.Precision Eng.,2009,17(11):2806-2813.(in Chinese)
[5]孙志慧,邓甲昊,闫小伟.国外激光成像探测系统的发展现状及其关键技术[J].科技导报,2008,26(3):74-79.SUN ZH H,DENG J H,YAN X W.Progress and current state of the development of laser imaging detection system and its key techniques[J].Sci.Technol.Rev.,2008,26(3):74-79.(in Chinese)
[6]胡春生.脉冲半导体激光器高速三维成像激光雷达研究[D].长沙:国防科学技术大学,2005.HU CH SH.Investigation into the high-speed pulsed laser diode 3D-imaging ladar[D].Changsha:National University of Defense Technology,2005.(in Chinese)
[7]SHEN C N,WAEBER B,GIRATA L,et al..Project radiant outlaw[J].SPIE,1994,2272:63-74.
[8]郑永超,赵铭军,张文平,等.激光雷达技术及其发展动向[J].红外与激光工程,2006,35(增刊):240-246.ZHENG Y C,ZHAO M J,ZHANG W P,et al..Trend of laser radar technology development[J].Infrared and Laser Eng.,2006,35(s):240-246.(in Chinese)
[9]赵远,蔡喜平,刘剑波,等.二极管泵浦固体激光雷达技术及其应用[J].红外与激光工程,2001,30(1):47-50.ZHAO Y,CAI X P,LIU J B,et al..Diode-pumped solid state laser radar technology and its applications[J].Infrared and Laser Eng.,2001,30(1):47-50.(in Chinese)
[10]屈平,杨培根,孟敏,等.应用广泛的激光雷达[J].探测与定位,2004(2):15-20.QU P,YANG P G,MENG M,et al..Broad applications of lidar[J].Detection and Localization,2004(2):15-20.(in Chinese)
[11]王德,李学千.半导体激光器的最新进展及其应用现状[J].光学精密工程,2001,9(3):279-283.WANG D,LI X Q.New progress in semiconductor lasers and their applications[J].Opt.Precision Eng.,2001,9(3):279-283.(in Chinese)
[12]王狂飙.激光制导武器的现状、关键技术与发展[J].红外与激光工程,2007,36(5):651-655.WANG K B.Status quo,key technology and development of laser guided weapon[J].Infrared and Laser Eng.,2007,36(5):651-655.(in Chinese)
[13]徐啟阳,杨坤涛,王新兵,等.蓝绿激光雷达海洋探测[M].北京:国防工业出版社,2002.XU Q Y,YANG K T,WANG X B,et al..Blue-Green Lidar Ocean Survey[M].Beijing:National Defence Industry Press,2002.(in Chinese)
[14]GSCHWENDTNERA B,KEICHER W E.Development of coherent laser radar at Lincoln Laboratory[J].Lincoln Lab.J.,2000,12(2):383-396.
[15]HEINRICHS R M,AULL B F,MARINO R M,et al..Three-dimensional laser radar with APD arrays[J].SPIE,2001,4337:106-117.
[16]ALBOTA M A,AULL B F,FOUCHE D G,et al..Three-dimensional imaging laser radars with geiger-mode avalanche photodiode arrays[J].Lincoln Lab.J.,2002,13(2):351-370.
[17]ALBOTA M A,HEINRICHS R M,KOCHER D G,et al.Three-dimensional imaging laser radar with a photon-counting avalanche photodiode array and microchip laser[J].Appl.Opt.,2002,41(35):7671-7678.
[18]MARINO R M,STEPHENS T,HATCH R E,et al.A compact 3D imaging laser radar system using Ceiger-mode APD arrays:system and measurements[J].SPIE,2003,5086:1-15.
[19]MARINO R M,DAVIS W R,RICH G C,et al..High-resolution 3D imaging laser radar flight test experiments[J].SPIE,2005,5791:138-151.
[20]MARINO R M,RICHARDSON J,GANIER R,et al..Photon-counting lidar for aerosol detection and 3-D imaging[J].SPIE,2009,7323:73230H-1-73230H-10.
[21]CHO P,ANDERSON H,HATCH R,et al..Real-time 3D ladar imaging[J].SPIE,2006,6235:62350G-1-62350G-12.
[22]SAVAGE J,HARRINGTON W,MCKINLEY R M,et al..3D-LZ helicopter lidar imaging system[J].SPIE,2010,7684:768407-1-768407-9.
[23]SZOBOSZLAY Z P,MCKINLEY Dr R A,BRADDOM LTC S R,et al..Landing an H-60 helicopter in brownout conditions using 3D-LZ displays[C].American Helicopter Society 66thAnnual Forum,Phoenix,AZ,May 11-13,2010.
[24]TUELL G,BARBOR K,WOZENCRAFT J.Overview of the coastal zone mapping and imaging lidar(CZMIL):a new multi-sensor airborne mapping system for the U.S.ArmyCorps of Engineers[J].SPIE,2010,7695:76950R-1-76950R-8.
[25]PIERCE J W,FUCHS E,NELSON S,et al..Development of a novel laser system for the CZMIL lidar[J].SPIE,2010,7695:76950V-1-76950V-6.
[26]CAMO J P do,MOEVIUS B,PFENNIGBAUER M,et al..Imaging LIDARs for space applications[J].SPIE,2008,7061:70610J-1-70610J-12.
[27]ISAKSSON F,BORG J,Hanlund L.3D rapid mapping[J].SPIE,2008,6946:6946D-1-6946D-9.
《发光学报》
EI收录中文核心期刊
《发光学报》是中国科学院长春光学精密机械与物理研究所与中国物理学会发光分会共同主办的中国物理学会发光分会的学术会刊。该刊是以发光学、凝聚态物质中的激发过程为专业研究方向的综合性学术刊物。
《发光学报》于1980年创刊,曾于1992年,1996年,2000年和2004年连续四次被《中文核心期刊要目总览》评为“物理学类核心期刊”,并于2000年同时被评为“无线电电子学、电信技术类核心期刊”。2000年获中国科学院优秀期刊二等奖。现已被《中国学术期刊(光盘版)》、《中国期刊网》和“万方数据资源系统”等列为源期刊。英国《科学文摘》(SA)自1999年;美国《化学文摘》(CA)和俄罗斯《文摘杂志》(AJ)自2000年;美国《剑桥科学文摘社网站》自2002年;日本《科技文献速报》(CBST,JICST)自2003年已定期收录检索该刊论文;2008年被荷兰“Elsevier Bibliographic Databases”和“EI”确定为源期刊。2001年在国家科技部组织的“中国期刊方阵”的评定中,《发光学报》被评为“双效期刊”。2002年获中国科学院2001~2002年度科学出版基金“择重”资助。2004年被选入《中国知识资源总库·中国科技精品库》。
本刊内容丰富、信息量大,主要反映本学科专业领域的科研和技术成就,及时报道国内外的学术动态,开展学术讨论和交流,为提高我国该学科的学术水平服务。
《发光学报》为双月刊,A4开本,144页,国内外公开发行。国内定价:40元,全年240元,全国各地邮局均可订阅。《发光学报》欢迎广大作者、读者广为利用,踊跃投稿。
主管单位:中国科学院
主办单位:中国科学院长春光学精密机械与物理研究所、中国物理学会发光分会
地 址:长春市东南湖大路3888号 《发光学报》编辑部
邮 编:130033
电 话:(0431)86176862,84613407
E-mail:fgxbt@126.com
国内统一刊号:CN 22-1116/O4
国际标准刊号:ISSN 1000-7032
国内邮发代号:12-312
国外发行代号:4863BM
http://www.fgxb.org
Development status of airborne 3D imaging lidar systems
ZHANG Jian,ZHANG Lei,ZENG Fei,WANG Xu,ZHAO Jia-xin,TIAN Hai-ying,REN Hang,LI Jun-feng
(Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China)
Airborne 3D imaging lidar is a new technique to produce a angle-angle-distance,angle-angle-velocity 3D image by laser imaging.This article emphasizes the mechanism,functions and configurations of the airborne 3D imaging lidar systems as well as their applications which includes both the military and civil fields.Then,it states the current situation and developing directions of the airborne 3D imaging lidar system in detail.It summarizes that the airborne 3D imaging lidar in foreign couritries will make advances on long distance,high resolution,low power consume,real time and laser safety,However,the current domestic research is still at the laboratory stage,and there is still a gap compared with other foreign countries.Some of the key technologies need to be solved.Finally,by taking a 3D image lidar system from a user for an example,it analysizes the requrirements of the system for the range measurement,scanning structures,detectors and dada processing and display.
airborne laser 3D imaging system;laser detection;laser radar;3D imaging
2011-01-12;
2011-03-13
TN958.98;TJ765.332;TJ439.2
A
1674-2915(2011)03-0213-20
张 健(1986—),男,山东济南人,研究实习员,主要从事航空光学遥感设备结构设计方面的研究。E-mail:zjian000@163.com
猜你喜欢
昆明医科大学学报(2021年6期)2021-07-31
科学(2020年5期)2020-11-26
河北省科学院学报(2020年4期)2020-03-19
小学科学(2020年1期)2020-02-18
科学(2020年6期)2020-02-06
百科探秘·航空航天(2020年12期)2020-01-22
小哥白尼(趣味科学)(2019年2期)2019-04-17
小学科学(2019年12期)2019-01-06
电子制作(2018年9期)2018-08-04
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24