超声探路车的自主导航行驶办法
2011-05-21 00:40张海鹰高艳丽张树团
电子设计工程 2011年11期
张海鹰,高艳丽,张树团
(海军航空工程学院 控制工程系,山东 烟台 264000)
拥有自主导航能力的智能探路车辆可以成为多种功能设备的运载平台,正越来越广泛地应用于工业、军事、科学探索和日常生活中。因而,对于自主导航车辆的研究也受到了越来越多的关注。
自主导航的探路车系统,能够在未知的、复杂的非结构环境中,通过对环境的感知找到有效的通行路径,到达期望的目标区。为了实现这样的功能,必须解决两个问题。首先,系统要获取详细可靠的环境信息;然后,在获取环境信息的基础上对信息进行加工处理,并根据需要判断出合理有效的通行路径。
在未知的行驶环境中,智能车辆通常使用传感器(如视觉传感器、超声传感器、激光测距仪等)探测环境信息进行反应式[1]导航。在各类传感器中,超声传感器的应用最为广泛。超声传感器是基于TOF(time of flight)技术,即发射超声波信号再接收其回波,根据发送和接收的时间差来计算目标对象距离的探测装置。使用超声传感器进行车辆导航,就是通过超声传感器测量环境中存在的障碍物距离,进而判断行驶环境的导航方法。
在具体的导航行驶中,循线行驶是车辆在未知环境中自主导航效率较高的办法,许多场合都要求车辆具有循线行驶能力。如环境中障碍物整体过于庞大,系统无法通过传感器了解其整体形状而无法规划其避碰路径时,车辆沿障碍物轮廓行驶是一个较为合理的办法[2]。
为实现探路车在未知环境中可靠高效地自主导航行驶,设计了一种新的基于超声传感器的导航行驶办法。基本思路为:用超声传感器做旋转扫描,探测行驶环境;根据环境的不同状况进行简单的避障行驶或复杂的循线行驶。
1 基于旋转超声传感器的环境探测
采用超声传感器探测环境信息时,为了获取更加详尽的信息,多数设计中都使用多组超声传感器阵列探测,即在车体的不同位置上安置超声传感器以探测不同方向上的环境信息。甚至使用全向的超声环进行全方位探测[3]。但是由于超声传感器自身存在的波束角的问题[4],探测结果大多指向性不足,尤其存在较多的探测盲区。为了克服这些缺点,设计中采用了使用步进电动机驱动小波束角超声传感器在扇形角度内旋转扫描的探测方法[5]。
使用波束角较小的超声传感器进行测距,可以提高探测精度,增强探测的指向性[4];使用步进电动机驱动传感器逐步扫描探测,不但可以减少传感器的使用数量,解决多传感器之间相互串扰的问题,而且可以更全面地探知行驶环境。并且,在设定电机每一步的步进角度小于传感器有效探测角度时,可使相邻两次探测的探测区域相互交叠,消除探测盲区的存在[5]。
设计中,在车体前端的正中及两侧共设置三组超声传感器旋转探测。以中央传感器为主,两侧传感器辅助,为车辆提供全面的导航信息。设定车体宽度为a,长度为b;主传感器的探测范围θ<180°,最大测距距离为R;驱动电机以角速度ω步进,在每一轮的探测中,系统共测距n次,得到n个连续的距离信息。当测距距离l<R时,标记为障碍物信息。每一轮可标记障碍物个数m≤n。
以车辆的正前方向为纵轴、垂直方向为横轴设立参考坐标系XOY。结合每一轮探测中测得的各组障碍物距离li与探测角度ai,确定障碍物的位置信息。
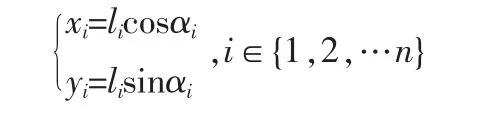
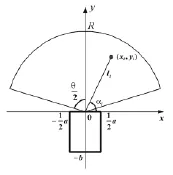
图1 参量设置Fig.1 Parameter settings
2 不同环境下的导航行驶办法
探路车导航时以目标方向为准,确定大致的行驶方向。在确定行驶方向后,环境情况一般包含以下几种类型:1)目标方向上无障碍物;2)目标方向上有障碍物但存在通行路径;3)目标方向上有障碍物且不存在通行路径。
对于不同的环境状况,系统可以使用不同的行驶办法以提高行驶效率[6]。
2.1 目标方向无障碍物存在
在主传感器一轮扫描中探知的全部障碍物位置(xi,yi),i∈{1,2,…n}中,如果则可确定当前环境下不存在阻碍车辆直线向目标方向行进的障碍物。此时,车辆无需做出任何避让行动,可直接通行。在这样的情况下,允许车辆保持一定的行驶速度边行进边探测。
由于在车辆行进时主传感器做扫描探测,所以对于部分障碍物的探测会出现延迟,不能够在第一时间发现障碍物。因而车辆的行进速度须受到限制。能够对车辆行进构成直接阻碍的障碍物,应处在车体正前方范围之内。最长延时情况,即障碍物横向坐标正处于车体边缘,刚好能对车辆的直线行驶造成阻碍;障碍物与车辆之间的距离刚刚达到传感器的最大探测距离;在主传感器当前一轮的扫描中,探测方向也恰好掠过障碍物所在的位置。刚好错过了对障碍物的探测。只有在下一轮的扫描中传感器再次朝向该障碍物时,才会探测到其存在。在延迟时间内,传感器共探测的角度范围,在这段时间内,车辆直线行进的距离不能超过最大探测距离R,否则会与障碍物发生碰撞。因而限定车辆行进速度
2.2 目标方向有障碍物但存在通行路径
在主传感器一轮扫描中探知的全部障碍物位置(xi,yi),i∈{1,2,…n}中,如果则当前环境下目标方向上存在障碍物,车辆不能直线行驶通过。此时,应判断当前环境中是否存在可通行路径允许车辆以简单的转弯避开障碍物。
将一轮n次探测中所标记的m个障碍物位置信息重新标记为(xk,yk),k=(1,2,…,m)。 若所有标记的障碍物中存在则判断当前环境下存在以障碍物(xk,yk)和(xk+1,yk+1)为参考的可行通路。但是,如果此轮探测是在车辆行进间获得的,那么得到的障碍物信息(xi,yi),i∈{1,2,…n}就不是处于同一参考坐标系下,不能用以直接参考计算。因此,必须将原有障碍物信息 做同一处理(xi,yi)。
以一轮探测中所标记的最后一个障碍物所处参考坐标系为基准,调整障碍物坐标为(x′i,y′i):直线行驶过程中保持横坐标不变,有 x′i=xi;纵坐标则要减去探测后的前进距离,y′i=yiv·t。传感器完成一轮扫描所需时间为相邻角度上两次探测的时间间隔所以,探测信息(xi,yi)在同一坐标系中调整为
然后,系统就以同一坐标下的可通行路径为目标,由直线行驶状态切换为转弯状态,直接转向行驶至路口处[7]。转弯过程中,传感器系统不再探测环境信息。至转弯完成后,停车,在静止状态下再作全面探测,决定下一步的行动。
2.3 目标方向有障碍物且不存在通行路径
如主传感器在一轮扫描中没有探测到任何可行通路,这种情况下选择循线行驶是效率较高的导航方法[2]。探路车循线行驶时所循的线,就是连续存在的障碍物。在没有可行通路的情况下,车辆先沿着连续存在的障碍物(如墙壁)行进,直到朝向目标区的通路出现后,再结束循线,驶向目标区。
在循线行驶的状态下,首先需要确定循线行驶的走向。假设传感器当前一轮探测是自左向右扫描,将所得的n个障碍物信息调整于同一坐标系下:(x′i,y′i),i∈{1,2,…n}。 计算如果 L1>L2,则表明当前情况下向左循线行驶更能有效接近目标区,应以车体右侧贴近连续存在的障碍物循线而行;如果L1>L2,则表明当前情况下向右循线行驶更能有效接近目标区,应以车体左侧贴近连续存在的障碍物循线行驶。
在循线行驶状态下,系统主传感器不再做探测环境信息的旋转扫描,而是探测车辆正前方的障碍物情况,避免碰撞发生;车体两侧的辅助传感器是循线行驶状态下得主要倚靠。传感器以45°的角度斜向前探测,测得距离D。D即为车体与障碍物之间的大致距离。循线过程中不断微调车辆行驶方向使完成以连续障碍物为参考的循线行驶。但在循线行驶过程中,构成循线轨迹的障碍物不一定是连续出现的,并且可能会有较大的起伏。
比较侧向传感器的当前测距数值Di与上一次测距数值Di-1。当侧向传感器的测距数值D突然增大时,说明循线轨迹上出现了较大的缺口,可能会存在新的可通行路径。如果循线轨迹上确实存在新的可行通路,那么路径宽度一定大于车体宽度a。由于侧向传感器是以45°的角度斜向探测,所以探测到新通路时,侧向传感器测距的突增值△D=Di-Di-1也一定大于 a。所以只有在△D>a的情况下,才有出现新通路的可能,此时车辆应结束循线行驶,使用主传感器对环境重新作全面探测,以确定是否存在新的通行路径。若存在,则转向新路径行驶;不存在,则继续循线行驶。△D>a,且存在新的通行路径的情况,即为循线轨迹中出现外拐角的情况。
图2 外拐角判定Fig.2 Out-corner judgment
当循线轨迹中出现的内拐角,在一定程度上阻断了当前循线行驶的线路。当主传感器测得的正前方障碍物距离l≤a时,可以判定循线线路上出现了内拐角,此时车辆结束循线行驶停止前进,再次使用主传感器作全面探测,而后直接转向新测得的通路继续行驶。
车辆在保持循线行驶状态时,其实际前进的方向,应当与目标区的引导方向不同。如果车辆的实际行驶方向与引导方向重合,车辆就应立即结束循线行驶,停车作全面探测,再决定下一步的行驶动作。
3 结 论
本文针对全未知环境下的车辆自主导航,提出了一种基于超声传感器旋转探测的导航方法。系统使用精度较高的超声传感器在一定角度内逐步扫描探测,通过对测距信息的处理,得到可靠的环境信息。然后根据环境状况的不同,将车辆的导航行驶模式进行分类,使车辆在各种行驶环境中都能够保持较高的行驶效率。但现有的导航方法,对复杂环境的分辨能力仍显不足,需要加强系统对多点障碍物环境下可通行路径的分辨能力。
[1]王琨,骆敏舟,赵江海.室内移动机器人导航中信息获取方法研究综述[J].机器人技术与应用,2010(2):38-42.WANG Kun, LUO Min-zhou, ZHAO Jiang-hai.Survey on information acquisition for indoor mobile robots navigation[J].Robot Technique and Application, 2010(2):38-42.
[2]王栋耀,马旭东,戴先中.基于声纳的移动机器人沿墙导航控制[J].机器人,2004(7):346-350,356.WANG Dong-yao, MA Xu-dong, DAI Xian-zhong.Wall-following navigation control for a sonar-based mobile robot[J].Robot, 2004(7):346-350,356.
[3]Holder M B,Trivedi M M,Marapane S B.Mobile robot navigation by wall following using a rotating ultrasonic scanner[C]//Proceedings of the 13th International Conference on Pattern Recognition,1996:298-302.
[4]宋伟,潘仲明,孔雅琼,等.小波束角超声测距仪的研制[J].计算机测量与控制,2008,16(4):585-587.SONG Wei, PAN Zhong-ming, KONG Ya-qiong, et al.Development ofultrasonic range-finding instrumentwith small beam width[J].Computer Measuring and Control,2008,16(4):585-587.
[5]金元郁,张海鹰.超声波自主探路车探测方法的改进[J].微计算机信息,2009,1(1):155-156.JIN Yuan-yu,ZHANG Hai-ying.The amelioration of the way that the ultrasonic self-determined exploring car explores[J].Control and Automation, 2009,1(1):155-156.
[6]黎陟,蔡自兴.多障碍物环境下机器人连续避障策略[J].微计算机信息,2007,23(9):257-258,25.LI Zhi,CAI Zi-xing.A continuous obstacle avoidance strategy under multi obstacles environment[J].Control and Automation, 2007,23(9):257-258,25.
[7]张海鹰.超声波自主探路车的转弯办法[J].信息技术与信息化,2009(1):76-78.ZHANG Hai-ying.The way of the ultrasonic self-determined exploring car swerves[J].Information technology and informatization, 2009(1):76-78.
猜你喜欢
计算机应用(2022年2期)2022-03-01
计算机应用(2021年4期)2021-04-20
计算机应用(2021年1期)2021-01-21
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
科学(2020年3期)2020-01-06
电子制作(2017年7期)2017-06-05
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
小天使·一年级语数英综合(2015年2期)2015-01-14
太空探索(2014年1期)2014-07-10