
基于图像处理的水位自动读取
2011-06-09 10:14姜晓玉花再军
电子设计工程 2011年23期
姜晓玉,花再军
(1.南京理工大学 理学院,江苏 南京 210014;2.河海大学 计算机与信息学院,江苏 南京 210098)
水位试验台是检验水位计的设备,它依赖于高精度的铟钢水位尺(以下简称水尺)。检测过程中,检测人员要频繁的从水尺读数,工作繁琐且易出错。从此工程背景出发,文中提出基于图像处理的水尺读取方法,给出了处理步骤、方法和处理结果,实现自动读数。
1 基于投影的水位图像的感兴趣区域分割
本系统采用的摄像机分辨率为659×494像素,视野范围近10 cm,相当于每像素分辨率为0.2 mm,每厘米有50像素。图1(a)为摄像机采集的包含水位的水尺图像,需要从图像中分离出含水位线水管部分图像,识别出水位线,然后在水尺上找到水位线位置附近两条厘米刻度线,计算出水位的毫米位上的数值,最后结合系统中精度为3 mm的激光水位计的测量结果得出精确的水位。
水管、水尺和背景有着灰度差异,且水管和水尺的图像具有垂直特性。将彩色图像灰度化,依照投影算法[2]y(j)=,对灰度图像做垂直投影,投影图上出现较大突变,如图1(b)所示。检测此突变位置即可找到水管和水尺的边界位置,分割结果如图1(c)所示。
2 水位线检测
对分离出的水管部分图像进行处理,定位水位线位置。水面是空气和水的分界面,存在亮度的变化,且玻璃管具有较强的反光作用,导致水位面的图像灰度较上下两侧的灰度小。采用算法对水管部分图像进行水平投影计算,结果如图2所示,观察发现水位线的水平投影明显小于两侧,以局部最小值作为水位线位。
3 刻度线检测和定位
定位水位线后,需要在水尺上确定水位线附近的两条厘米刻度线的位置。因为每厘米大约相当于50像素,截取水尺图像中水位线上下各70像素内子图像区域作为后续处理的图像,这样保证区域内有至少2条厘米刻度线,并且相对于在整个图像区域计算可减小后续处理的运算量,截取的水尺部分图像如图3(a)所示。
3.1 边缘检测

图1 水尺图像Fig.1 Images of watert ruler
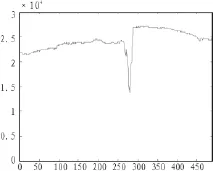
图2 水平投影结果Fig.2 The result of horizontal projection
图像最基本的特征是边缘,所谓边缘是指其周围像素灰度有阶跃变化或屋顶状变化的那些像素的集合,它存在于目标与背景、目标与目标、区域与区域、基元与基元之间。经典的、最简单的边缘检测方法是对原始图像按像素的某邻域构造边缘检测算子,如Canny算子,Roberts算子,Sobel算子,Prewitt算子,Laplacian算子[3]等。Canny算子是一类具有优良性能的边缘检测算子,它在许多图像处理领域得到广泛应用。基本思想是:先对处理的图像选择一定的Guass滤波器进行平滑滤波,然后采用一种称之为“非极值抑制”技术,得到最后所需的边缘图像[3]。我们用Canny算子对水尺区域进行边缘检测,检测结果如图3(b)所示,边缘非常丰富。但刻度线具有水平特性,且刻度相对集中,根据这些特点对提取的边缘结果用数学形态学作进一步处理,提取刻度线信息。

图3 检测结果Fig.3 The result of operatoration
3.2 数学形态学处理
数学形态学运算是针对二值图像的图像处理方法,近年来在数字图像处理和模式识别领域中得到了广泛的应用。数学形态学的基本运算包括膨胀、腐蚀、开运算、闭运算[4]。采用形态学方法,选取结构元素对边缘二值图像进行闭运算,图像中刻度线将连为一体,与数字部分分隔开。再进行一次开运算,进行一定程度的滤波,去除一些小的孤立噪声点。开运算结构元素选为
形态学处理结果如图4(a)所示,此时刻度部分已经连成了一体。对结果进行标记[4],提取出连通最大的部分[5-6]—刻度区域,结果如图4(b)所示。
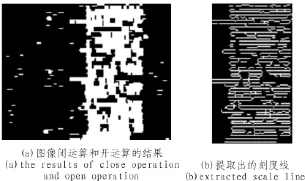
图4 形态学处理结果Fig.4 The result of morphologic process
3.3 厘米刻度线检测
厘米线是最长的刻度线,但由于光照,图像斑点噪声等原因造成了刻度线的部分断裂和缺失。采用直接的投影方法可能不能找到厘米刻度线,刻度线除了长度特点外还具有象素位置偏左的特点。采用一种代权重的投影方法。依据图像的特点,设定靠近左侧的像素权重高于右侧的像素。刻度二值图像用 x(i,j)表示,其宽度为 w,高度为 h,权重为(w-j),算法如下:

该算法为一系列加减法运算,速度较快。处理后结果如图5所示。

图5 加权水平投影计算结果Fig.5 The result of weighted horizontal projection
由于在边缘检测中产生了双边缘现象,图5中两条厘米刻度线均出现了双峰,需要进一步确定刻度线的准确位置。对上述检测结果中的最大的4个峰检测,邻近的两个峰代表了同一条厘米刻度线,两者的中间位置认为就是厘米线的真正位置。后文将从测量误差方面验证这样选取的合理性。
4 水位计算
水位线上侧厘米刻度线像素位置yH,下侧厘米刻度线像素位置yL,水位线像素位置为yw,水位台系统的激光水位计测得的水位为H厘米,激光水位计的测量误差不超过0.3 cm。水尺测得的水位为L厘米。激光水位计测得的水位毫米位上的数值是不准确的,需经由水尺测量的结果来校正。水位校正过程如下:
水位的毫米数

激光水位计测得的水位H的整数部分Hint;激光水位计测得的水位H的小数部分Hfrac。
如果 Lfrac-Hfrac>0.5,则 L=Hint-1+Lfrac;
如果 0≤Lfrac-Hfrac<0.5,则 L=Hint+Lfrac;
如果 Hfrac-Lfrac>0.5,则 L=Hint+1+Lfrac;
如果 0≤Hfrac-Lfrac<0.5,则 L=Hint+Lfrac;
5 误差分析

水位误差小于0.4 mm,优于激光水位计的精度3 mm,且达到误差小于0.5 mm的指标。
6 结 论
通过区域提取,边缘检测,形态学处理以及加权投影方法得到了水位的测量值,水位测量误差<1 mm,可替代人工读数。
[1]花再军,黄凤辰,陈钊.组态王在十米水位试验台中的应用[J].工业控制计算机,2011,24(9):24-25.HUA Zai-jun,HUANG Feng-chen,CHEN Zhao.The implementation of KingView software in ten-meter water-level testing and calibration platform[J].Industrial Control Computer,2011,24(9):24-25.
[2]全书海,薛志华,王琴,等.基于投影图像分布特征的车牌定位算法研究与实现[J].武汉理工大学学报:交通科学与工程版,2005,29(6):879-882.QUAN Shu-hai,XUE Zhi-hua,WANG Qin,et al.Implementation and research of vehicle license plate locating method based on the distributed character of projection image[J].Journal of Wuhan University of Technology:Transportation Science&Engineering,2005,29(6):879-882.
[3]贾云得.机器视觉[M].北京:科学出版社,2000.
[4]冈萨雷斯.数字图像处理[M].2版.阮秋琦译.北京:电子工业出版社,2007.
[5]任明武,杨万扣,王欢,等.一种基于图像的水位自动测量新方法[J].计算机工程与应用,2007,43(22):204-206.REN Ming-wu,YANG Wan-kou,WANG Huan,et al.New algorithm of automatic water level measurement based on image processing[J].ComputerEngineeringand Applications,2007,43(22):204-206.
[6]刘治锋.基于图像的水位自动检测研究[D].南京:南京理工大学,2004.
猜你喜欢
珠江水运(2021年24期)2022-01-23
设备管理与维修(2021年15期)2021-09-04
辽宁化工(2020年6期)2020-07-08
水运工程(2020年2期)2020-02-26
科技与创新(2019年22期)2019-12-07
广船科技(2019年2期)2019-10-16
——一个解释欧姆表刻度不均匀的好方法
教学考试(高考物理)(2018年6期)2018-12-06
数学小灵通(1-2年级)(2017年9期)2017-10-13
学苑创造·B版(2017年1期)2017-02-21
小天使·二年级语数英综合(2016年9期)2016-05-14
