
基于滑模变结构控制的二级倒立摆实验仿真研究
2011-10-26 03:27雷源春师路欢广州科技职业技术学院广州510550
中国科技信息 2011年7期
雷源春 师路欢 广州科技职业技术学院,广州 510550
基于滑模变结构控制的二级倒立摆实验仿真研究
雷源春 师路欢 广州科技职业技术学院,广州 510550
针对二级倒立摆系统的快速响应及其稳定和鲁棒控制问题,以直线二级倒立摆为研究对象,在建立其非线性数学模型的基础上,利用极点配置方法设计了滑模变结构控制器。将所设计的控制器应用到二级倒立摆系统,实验仿真表明,该控制策略实现了对二级倒立摆系统的实时跟踪控制,系统具有较好稳定控制和较强抗干扰能力。
二级倒立摆;极点配置;滑模;变结构控制
引言
倒立摆是机器人技术、计算机控制、控制理论等多领域、多技术的有机结合,其被控系统本身又是一个多变量、高阶次、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究[2]。最初的研究从二十世纪50年代开始,麻省理工学院的控制论专家根据火箭发射助推器原理设计出一级倒立摆实验设备。近年来随着新的控制算法不断出现,倒立摆系统这一典型的控制实践对象,正被广泛地用于检验控制算法是否有较强的处理多变量、非线性系统的能力,从中找出最优秀的控制方法[6]。
二级倒立摆系统作为控制理论研究中的一种比较理想的实验手段,为自动控制理论的教学、实验和科研构建一个良好的实验平台[5]。本文在建立二级倒立摆数学模型的基础上,设计了一个滑膜变结构控制器。为减少实验的盲目性,先对建立好的数学模型进行仿真研究,在此基础上进行实际物理系统的实验。实验结果证明该方法的可行性和有效性。
1 二级倒立摆系统模型
本实验控制装置为固高科技的直线二级倒立摆系统,原理示意图,如图1所示。它由导轨、小车、及两根摆杆构成,导轨一端有力矩电机,小车被电机驱动沿导轨滑动;二级倒立摆控制系统在带动小车的伺服电机、摆杆1和摆杆2上都安装有光电编码器,进行摆体、摆杆1和摆杆2的位置测量。对二级摆的控制需要6个状态变量,分别是摆体位置、摆体速度、摆杆1位置、摆杆1速度、摆杆2位置和摆杆2速度,通过差分运算公式得到摆体速度、摆杆1速度和摆杆2速度,从而利用状态反馈可以实现倒立摆的控制。小车与下摆杆、两根摆杆之间通过铰链传递力,最终的稳定状态表现为系统不会震荡发散或突然倒下[11]。
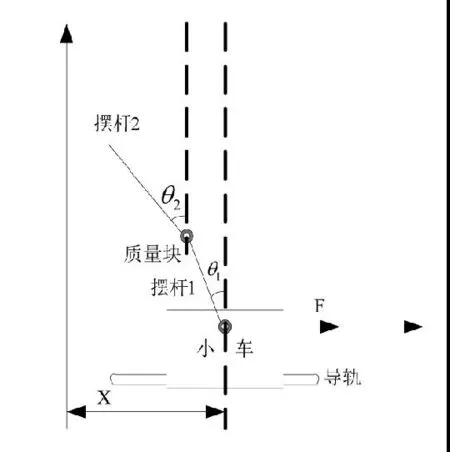
图1 二级倒立摆的原理示意图

2 滑模变结构的控制器设计
从得到的数学模型可以看出,二级倒立摆系统是一个多变量、非线性的控制对象,必须采取有效的方法才能实现其控制[1]。滑模变结构控制作为一种非线性控制,与常规控制的根本区别在于控制的不连续性,它利用一种特殊的滑模控制方式,强迫系统的状态变量沿着人为规定的相轨迹滑到期望点[9]。
滑模变结构控制系统的运动分为2个阶段:滑动阶段和能达阶段,滑动阶段即将状态空间中的一个状态在控制量的作用下转移到所设计的切换平面,能达阶段是将切换面上的点移到原点。因此控制器的设计也分2步完成:第1 步是变结构控制律的设计,使系统由初始状态进入设计的滑动超平面[4]。第2步是滑动模态域的设计,使系统状态沿超平面向状态原点运动[8]。
在上述系统中取切换函数:

3 仿真实验分析
将所设计的控制器,结合二级倒立摆的仿真研究中,取采样时间T=0.02s,仿真时间为30s,初始条件为x=[0,0.5,0.3,0,0,0],其阶跃响应的仿真结果如图2所示。
由图2可以看出,采用滑模变结构控制能使小车位移(Cart Position图形)和2个摆杆的角度(Pendulum Angle图形)很快地收敛至原点,系统(S图形)3 s 内就趋于稳定了,响应的速度很快。对小车的位置控制基本没有稳态误差。从控制器的输出曲线看出,可见,变结构控制在倒立摆中的应用是十分有效的。

图2 系统仿真结果
在此基础上,将该控制方法应用到二级倒立摆的实际系统中。实验结果如图3所示。其中,3(a)为小车滑动位置输出;3(b)摆杆2角度输出。二级倒立摆实时输出表明:摆干2输出偏角在[-3.2, -3.1]之间运动,小车在水平方向稳定。在加入人为的扰动后能建立平衡。

图3 二级倒立摆实时响应输出
应用滑膜变结构控制算法成功实现对二级倒立摆的控制,具有较好的控制效果。仿真实验结果表明,所设计控制策略有良好的抗干扰能力和鲁棒性。通过二级倒立摆这个典型的非线性控制对象可以看出,对于一些复杂的非线性、不稳定和参数摄动的控制问题,滑模变结构控制方法是一种有效的解决途径。且滑模变结构控制方法设计简单,具有广泛的实用性。
4 结束语
[1] 宋军烈,肖军. 倒立摆系统的Lagrange方程建模与模糊控制[J].东北大学学报(自然科学版).2002,23(4): 333-337.
[2] 张昌凡. 滑模变结构控制研究综述[J].株洲工学院学报.2004,18(2):1~5
[3] 张克勤. 滑模变结构控制理论及其在倒立摆系统中的应用研究[D].浙江大学学报.2003(5)
[4] 胡阳,王吉芳. 二级倒立摆系统的实时稳定控制实验研究[J]. 计算机仿真. 2009,9
[5] Xiao J, Zhang S, Xu X H. A weighted fuzzy control of double inverted pendulum [A]. Proceeding of the Third Asian Control Conference [C]. Shanghai,2000: 1604-1607.
[6] Inoue Akira, Deng Mingcong. Swing_up controller design for cart_type double inverted pendulum[J]. Control Theory &Applicat ions, 2004, 21(5):709-716.
[7] 袁性忠,姜新建. 基于滑模变结构的倒立摆系统稳定控制[J].控制理论与应用.2004,21(5): 720-723
[8] 湛力,孙鹏,陈雯柏. 倒立摆系统的自摆起和稳定控制[J].计算机仿真.2006,23(8):289-92
[9] Keqin Zhang,Kaiyu Zhuang. Sliding mode identifier for parameter uncertain nonlinear dynamic systems with nonlinear input[J]. Zhe jiang University(Science), 2002:426-430.
[10] 陈谋,长生.基于非线性控制方法的倒立摆系统控制[J]. 控制理论与应用.2004,21(5):684-688
[11] 战江洋,侯立刚. 基于滑模控制的二级倒立摆稳定控制[J].青岛科技大学学报(自然科学版).2009,04:365-368
Research of sliding mode variable structure base on double inverted pendulum
Lei Yuanchun Shi Luhuan Guangzhou Vocational College of Science and Technology ,Guangzhou 510550,China
To address such issues as quick response, stability and robust control of the double inverted pendulum system, the linear double inverted pendulum is researched as the object on the base of establishing its nonlinear mathematical model, so the sliding mode variable structure controller is designed by using poles method. At last, the designed controller is applied to the two-level inverted pendulum system, the experimental results show, the real-time tracking control is achieved for the two-level inverted pendulum system by this control strategy, so the system has a good stability control and strong anti-interference ability.
double inverted pendulum;poles method;sliding mode;viable structure control
10.3969/j.issn.1001-8972.2011.07.150
雷源春、出生年:1983年、性别:男、籍贯:湖南、学历:本科、职称:助教,研究方向:汽车电子。
猜你喜欢
电子技术与软件工程(2019年18期)2019-11-18
制造技术与机床(2019年8期)2019-09-03
设备管理与维修(2019年14期)2019-06-16
中国惯性技术学报(2019年6期)2019-03-04
制造技术与机床(2018年11期)2018-11-23
意林(绘英语)(2018年1期)2018-04-28
北京航空航天大学学报(2017年4期)2017-11-23
中国新技术新产品(2017年21期)2017-09-28
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
