4轮驱动车辆ASR半物理仿真研究
2011-11-22 06:43孙文军肖殿东聂幸福叶阳
湖北汽车工业学院学报 2011年3期
孙文军,肖殿东,聂幸福,叶阳
(陕西法士特汽车传动工程研究院 智能传动第一室,陕西 西安 710119)
车辆制动安全性一直是车辆动力学技术研究与应用的热点[1]。ABS的开发与应用使车辆在紧急制动时的制动效能和稳定性都得到一定保障[2-3]。ASR在驱动过程中可根据车辆的行驶状况使驱动轮得到最佳纵向驱动力,使得车辆的动力性、安全性和燃油经济性得到提高。在装备了ABS的汽车上,ABS的轮速传感器和压力调节器可全部为ASR所利用[4],在ABS的电子控制单元的基础上,添加对发动机输出力矩的调节和对驱动轮制动压力的调节功能即可实现完善的ABS/ASR集成系统。ABS和ASR的集成将是车辆主动安全技术的一个发展方向[5]。
1 汽车ABS/ASR集成系统的组成
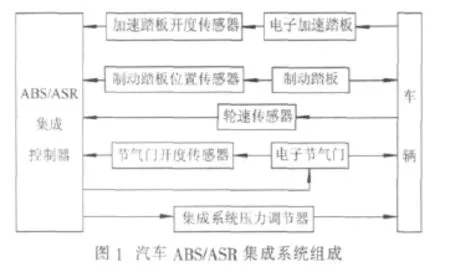
汽车ABS/ASR集成系统主要由轮速传感器、电子加速踏板与电子节气门机构、集成系统控制器和集成系统压力调节器等组成。集成系统控制器检测轮速信号、制动踏板信号、电子加速踏板信号以及电子节气门开度信号,并将以上信号进行处理与运算,判断当前车辆与车轮的运动状态。进而根据当前的工况调用ABS或者是ASR程序,输出电磁阀驱动信号和ABS电动机驱动信号或者节气门力矩电机驱动信号,对车辆和车轮的运动状态进行控制。ABS/ASR集成系统组成框图如图1所示。
2 汽车ABS/ASR集成系统控制逻辑
汽车ABS/ASR集成控制系统中ABS和ASR子系统本身都是复杂的控制系统。软件系统的集成并不是把ABS和ASR控制系统简单地叠加,而是要把它们有机地融合,同时还必须要考虑到软件运行的实时性、可靠性等问题[6],必须根据具体的行驶工况来建立控制优先级判断逻辑,进行合理的资源分配[7]。以下介绍集成系统的总体控制程序与子程序程序。
2.1 总体控制逻辑
车辆起动后,ABS/ASR集成系统上电进行初始化与自检,如果存在除轮速传感器之外的故障则点亮故障指示灯并退出系统,若不存在故障,则系统采集轮速信号后对轮速传感器的状态进行判断,如果轮速传感器存在故障则点亮故障指示灯并退出系统,如果没有故障则根据制动信号和轮速信号判断当前车辆的行驶状况。当踩下制动踏板时,集成系统会将车轮减速度与控制门限相比较,决定进行常规制动或者调用ABS子程序。当踩下电子加速踏板且车速小于40 km·h-1时,集成系统会根据驱动轮滑转率或者轮速差与控制门限相比较,从而决定进行节气门跟随控制或者调用ASR子程序。当踩下电子加速踏板且车速大于40 km·h-1时,认为车辆具有足够的加速能力,只进行节气门跟随控制。
2.2 制动操作优先级设置
ABS/ASR集成系统对驾驶员的各种操作均会做出合理和迅速的响应,不会影响驾驶员的合理常规操作。为了提高了车辆的行驶安全性能,在控制逻辑中将制动操作的优先级设置为最高,当驾驶员踩下制动踏板时,系统能够及时退出当前的控制,对制动操作作出响应,即使同时踩下电子加速踏板仍然可以正常的制动,从而避免由于驾驶员误操作造成的车辆不能正常制动。
2.3 制动工况控制逻辑
汽车进行常规制动时,制动力由驾驶员通过制动踏板控制。汽车进行紧急制动时,当车轮减速度小于第1车轮减速度门限值时,ABS子系统计算参考车速和各车轮的滑移率,根据当前车辆运动状态进行路面识别,并对车轮采取保压控制,此后车轮滑移率还会继续增大,当车轮滑移率大于滑移率第1门限值时,采取减压控制,此前称为第1相位;随着制动压力的减小,车轮减速度先减小后增大,当车轮减速度回升至减速度第2门限值时,对车轮采取保压控制,控制相位进入第3相位;由于此时车轮减速度处于增大阶段,所以轮速升高,滑移率减小,当滑移率小于第2门限值时,对车轮采取阶梯增压控制,控制相位进入第4相位;当滑移率再次达到滑移率第1门限值时,一个循环周期结束[8]。
2.4 驱动工况控制逻辑
汽车加速行驶时,如果驱动轮未发生滑转,集成系统调用节气门跟随控制子系统,根据驾驶员的意图控制节气门开度。如果驱动轮发生滑转,则调用ASR子系统。由于磁电式传感器具有测量阈值,只有当转速大于某一数值时,才能得到较为可信的转速值[9]。当车速较低时,计算得到的驱动轮滑转率误差较大,可采用汽车滑转侧的驱动轮和非驱动轮的轮速差作为控制量。当车速较高时,则可以较准确地得到驱动轮滑转率,采用驱动轮滑转率作为控制量.因此将ASR的控制算法分为2个模式:行驶加速ASR控制和起步加速ASR控制,当ASR参考车速小于7.5 km·h-1时,采用起步加速控制,当ASR 参考车速大于 7.5 km·h-1且小于 40 km·h-1时采用行驶加速控制。在2种控制模式下,ASR子系统会根据两侧驱动轮滑转程度的差异判断车辆行驶在单一附着路面还是分离附着系数路面.在单一附着路面上,ASR子系统通过节气门调节发动机的输出力矩,控制驱动轮的过度滑转;在分离附着系数路面上,ASR子系统通过对滑转侧驱动轮施加制动的措施增加另外一侧驱动轮的驱动力,从而提高车辆的驱动能力。当ASR参考车速大于40km·h-1时,则认为驱动轮能够提供足够的驱动力,集成系统此时根据驾驶员的意志进行节气门跟随控制。
3 汽车ABS/ASR集成系统控制逻辑实车验证试验
为了验证ABS/ASR集成控制系统的控制逻辑与控制效果,用捷达GTX轿车进行了实车试验。
3.1 制动操作优先级测试试验
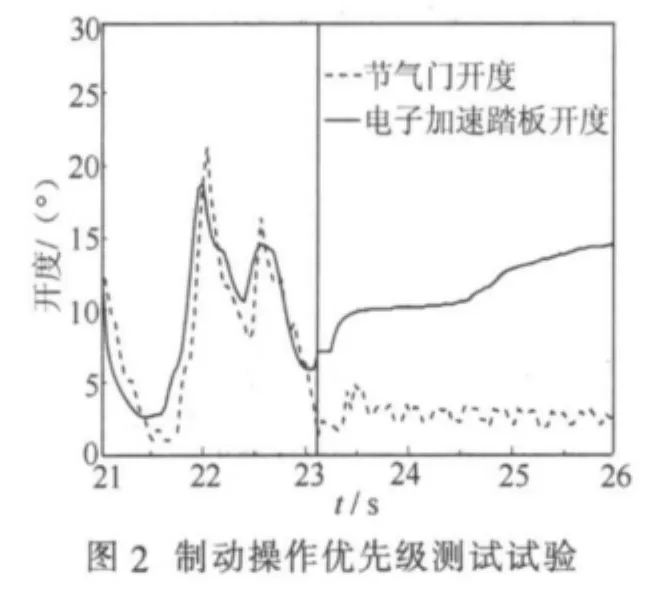
将试验车辆直线加速至约27 km·h-1,不踩下离合器踏板,而是同时踩下电子加速踏板和制动踏板,对试验车辆进行常规轻微制动。电子加速踏板与节气门开度如图2所示。大约23.1 s处竖线用来标记制动开始时刻。
从图2中可以看出,在驾驶员进行制动之前,集成系统根据驾驶员的操作进行节气门跟随控制,节气门能够及时跟随电子加速踏板开度的变化而进行控制。当驾驶员采取制动操作后,虽然此时电子加速踏板仍然被踩下,但是由于制动操作的优先级最高,集成系统退出节气门跟随控制子程序,节气门开度在怠速开度附近波动。
3.2 ABS子系统性能实车试验
为了验证ABS/ASR集成控制系统中ABS子系统的性能,分别进行了高附着和低附着路面上的ABS实车试验,试验结果如图3~4所示,图中纵坐标为车轮转速v。
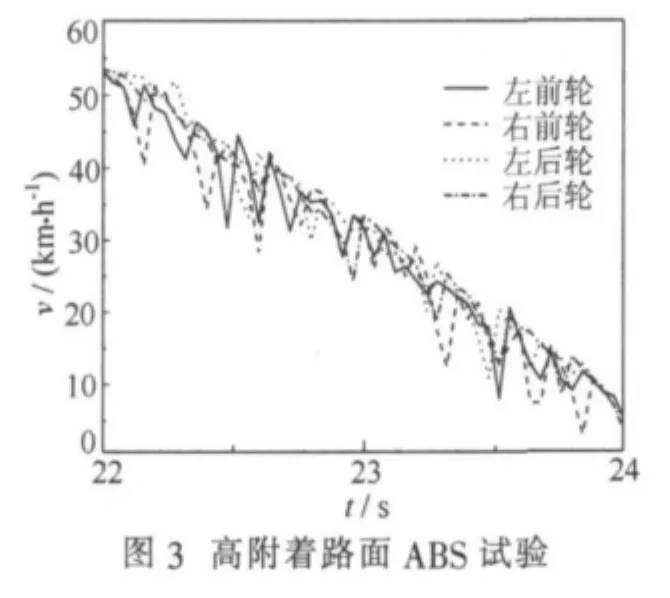
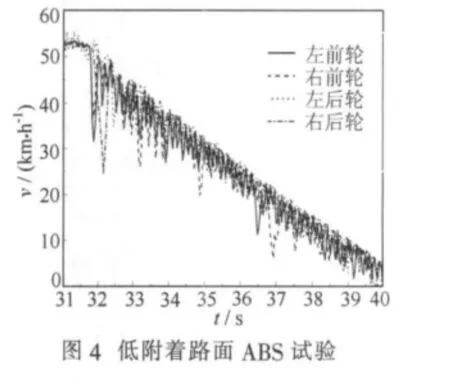
试验中,4个车轮均未抱死,在高附着路面上制动时车身减速度约为6.25 m·s-2,在低附着路面上制动时车身减速度约为1.39 m·s-2.由于附着系数的差异,在低附着路面上的制动时间较在高附着路面上的制动时间明显变长。
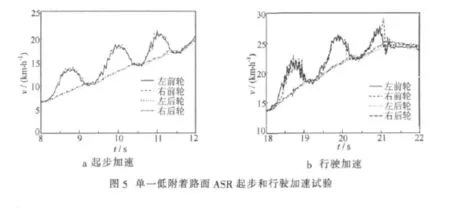
3.3 ASR子系统性能实车试验
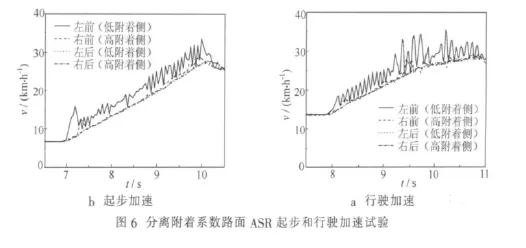
为了验证ABS/ASR集成控制系统中ASR子系统的性能,分别进行了单一低附着路面起步加速、行驶加速以及分离附着系数路面起步加速、行驶加速的ASR实车试验,试验结果如图5~6所示。试验车辆在低附着路面上起步加速与行驶加速时,驱动轮的滑转程度得到了较好的控制,平均车身加速度约为1 m·s-2,车辆的加速能力得到了一定程度的改善。
试验车辆在对开路面上起步加速与行驶加速时,低附着一侧驱动轮的滑转程度得到了较好的控制,平均车身加速度约为1.8 m·s-2,车辆的加速能力得到了一定程度的改善。
4 结论
文中基于成熟的ABS和ASR控制逻辑,设计了ABS/ASR集成控制系统的控制逻辑,并通过实车试验进行了验证。试验结果表明:集成系统能够根据各个相关传感器信号判断车辆的制动与驱动工况,在紧急制动工况中调用ABS子程序,在低附着或者分离附着系数路面上急加速时调用ASR子程序,改善了车辆的制动性能与加速性能;并在控制逻辑中将制动操作的优先级设置为最高,提高了车辆的安全性。
[1]张永辉,于良耀,宋健,等.基于减速度参数的电子制动力分配控制算法 [J].江苏大学学报:自然科学版,2010,31(6):645-650.
[2] 宋健,沈俊,孔磊.四驱车辆ABS控制算法[J].江苏大学学报:自然科学版,2006,27(4):320-323.
[3] 宋健,孔磊,沈俊.特殊工况下的 ABS 控制算法[J].江苏大学学报:自然科学版,2006,27(2):117-121.
[4] Akihiko Sekiguchi,Toshifumi Maechara.ASR Built in an Add-On ABS [J].SAE Technical Paper Series 930506,1993.
[5] 李志远.捷达GTX轿车驱动防滑控制技术研究[D].北京:北京理工大学机械与车辆工程学院,2008:10-13.
[6] 崔海峰,齐志权,王仁广,等.基于 MC9S12DP256的轿车ABS/ASR集成控制系统 [J].自动化与仪器仪表,2005(12):23-25.
[7] 吴利军,崔海峰,马岳峰.汽车ABS/ASR/ACC集成控制系统设计[J].液压与气动,2006(9) :3-5.
[8] 张彪.ABS路面识别和控制技术研究 [D].北京:北京理工大学,2008:136-138.
[9] 刘海鸥,陈慧岩,余春晖.车辆起步车速测量技术的研究[J].传感器技术,2001(11) :52-54.
猜你喜欢
汽车安全与节能学报(2022年2期)2022-07-17
汽车实用技术(2022年10期)2022-06-09
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2020年24期)2021-01-05
中国新技术新产品(2020年4期)2020-05-05
汽车维护与修理(2019年3期)2019-08-08
汽车维护与修理(2018年19期)2018-04-28
科技创新导报(2016年27期)2017-03-14
汽车维修与保养(2015年1期)2015-04-17