基于SPN的无线闭塞中心切换过程中的故障分析
2011-11-26 07:10李嘉懿王长林
铁路计算机应用 2011年8期
李嘉懿 ,王长林
(西南交通大学 信息科学与技术学院, 成都 610031)
无线闭塞中心(RBC)是CTCS-3级列控系统的地面核心设备,也是关系到列车行驶安全的重要设备。RBC根据所运行列车的位置、轨道占用、列车进路、临时限速、灾害防护和线路参数等信息,计算出针对所控列车的行车许可(MA),并通过GSM-R将MA、线路参数、临时限速信息传送给CTCS-3级车载子系统,同时通过GSM-R无线通信系统接收车载设备发送的位置和列车数据等信息,保证其管辖范围内列车的运行安全。当列车从一个RBC管辖区域运行到另一个RBC管辖区域的过程中涉及RBC切换,而RBC切换效率是保证列车在切换点不减速运行的重要因素,当RBC故障时,切换效率会受到影响。运用形式化语言中随机Petri网(SPN)对切换过程进行建模,可分析出RBC故障对切换及列车行驶安全的影响。
1 RBC切换协议
在切换过程中,RBC1(移交RBC)负责向RBC2(接收RBC)发送切换预告信息(车载设备ID、RBC边界的应答器组ID、列车数据等)、进路请求信息、切换通告信息、切换确认信息、切换取消信息。RBC2负责向RBC1发送进路信息、接管列车信息。RBC切换分为两种情况,图1为RBC切换示意图。
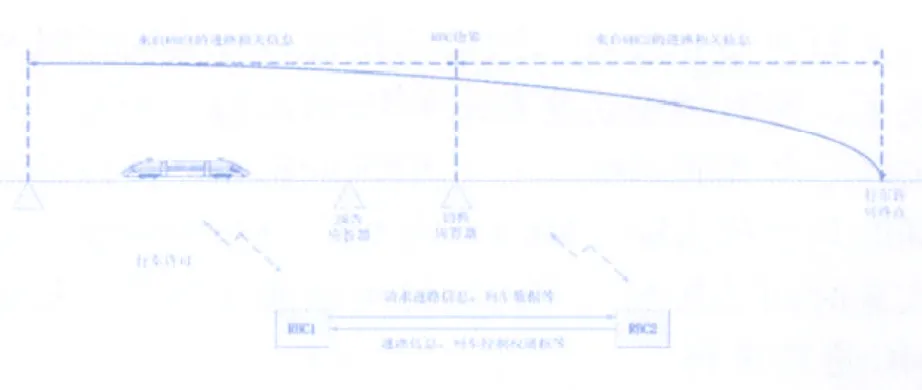
图1 RBC切换示意图
1.1 有两台车载电台情况下的RBC切换
有两台车载电台情况下,当列车越过切换应答器,车载设备向RBC1发送位置报告后,RBC1向车载设备发送切换命令及RBC2的电话信息,同时向RBC2发送列车信息,当车载设备收到电话信息后呼叫RBC2,之后的过程中车载要同时向两个RBC发送位置报告,当列车头部(最大安全前端)越过边界后,车载设备向RBC1及RBC2发送位置报告。从此,车载设备只使用从RBC2接收到的信息,并拒绝接受RBCl除终止会话信息之外的其他信息。RBC2收到列车最大前端已越过RBC切换边界的位置报告后向RBCl发送接管列车信息。当列车尾部(最小安全末端)越过边界后,车载设备向RBC1及RBC2发送位置报告。车载设备接收到RBC1切断无线连接的命令后,中断与RBC1的通信连接,完成切换。
1.2 只有一台车载电台情况下的RBC切换
与两台不同的是,当列车尾部越过切换点、车载设备接收到RBC1切断无线连接命令后,切断与RBC1的通信连接。车载设备根据RBC1先前下达的切换命令,呼叫RBC2。呼叫成功后,列控车载设备向RBC2发送通信初始化信息、RBC2向列车发送通信版本信息、车载设备向RBC2发送通信建立信息。至此,车载设备与RBC2建立了通信会话。
2 随机Petri网(SPN)
对于列车运行系统的建模和分析,目前,已经有很多国外教学机构和学者运用形式化语言对其的并发、实时和分布式等特点进行研究,由于形式化语言有着坚实的数学理论作为基础,所以能够更加准确地描述模型的随机性等特点,本文利用SPN对非确定性、并发事件的处理能力,对RBC的故障模型进行仿真,这样可以得出更加准确的定量分析结果。
SPN是把变迁与随机的指数分布实施延时相联系。 SPN模型是将基本的Petri的每一个变迁相关联一个实施速率,一个SPN同构于一个连续时间的马尔科夫链(MC),典型的SPN假设变迁的实施时间呈指数分布,这样可以通过与其同构的MC进行求解。
在连续时间SPN中,一个变迁从可实施到实施需要延时,即从一个变迁t变成可实施的时刻到它实施时刻之间被看成是一个连续随机变量xt(取正实数值),且服从于一个分布函数t:

在不同类型的随机时间网中,这个分布函数的定义是不一样的。连续时间SPN中,相关于每个变迁的分布函数定义成一个指数分布函数:

其中,实参数λt(λt>0)是变迁t的平均实施速率,变迁x≥0。
SPN的分析方法分3个过程:(1)建立系统的一个SPN模型;(2)求出SPN的可达图后作出同构的MC;(3)基于MC的稳定状态概率对所要求的系统进行性能分析。本文运用SPNP6.0作为分析求解软件。
3 RBC故障
RBC切换成功率受多方面因素的影响,包括GSM-R网络故障,RBC故障,其它地面设备故障等,根据CTCS-3级列控系统总体技术方案中的规定:RBC故障后,受其控制的列车将中断与RBC之间的通信连接,15 s后由于列车不能从RBC收到任何消息,将进行制动,列车运行速度降至满足CTCS-2级系统运行速度时,自动转为CTCS-2级,备用系统继续运行。RBC设备区域内所有CTCS-3级列车注册信息将在5 min后自动删除,故障恢复后,CTCS-2级列车将呼叫RBC重新进行注册并申请行车许可,列车在获得MA后,自动由CTCS-2级控车转到CTCS-3级控车。
文中将RBC切换流程分为以下3个时段:
时段1:列车未到达切换预告点但在距离切换预告点一段时间内处;时段2:列车越过切换预告点但头部还未越过切换点;时段3:列车头部越过切换点。
各时段分布示意如图2。

图2 时段分布示意图
以上3个时段下RBC2故障对列车切换的影响各不相同。本文运用SPN,对以上3种情况下RBC2故障时RBC切换的成功率进行分析。
4 RBC故障下SPN模型
以下模型均为1台车载设备情况下RBC2故障对切换成功率的影响,介绍RBC故障时整体RBC切换时的模型以及时段2时、时段3情况下RBC故障对切换的影响。
在时段1中,RBC2对列车的切换没有影响,所以此处不作分析。
4.1 RBC故障模型
该模型描述了在切换过程中RBC发生故障时,列车将降级至CTCS-2级运行,以及RBC功能恢复后,列车恢复至CTCS-3级运行的情况。
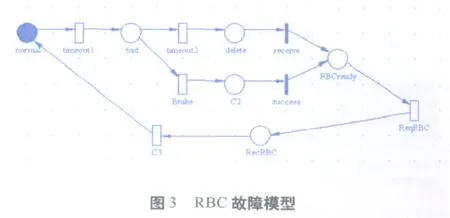
图3 RBC故障模型
如图3,库所normal代表列车正常行驶,经过15 s(变迁timeout1)后没有接收到RBC信息,到达库所bad即判定RBC故障。
RBC故障后,经过5 min(变迁timeout2),若无回复则转至库所delete(删除注册),待RBC恢复,经过库所receive(列车重新收到RBC信息)后,RBC进入库所RBCready(RBC进入正常工作状态),列车呼叫RBC请求行车许可(变迁ReqRBC),收到行车许可后,进入库所RecRBC,升至CTCS-3级列车运行(变迁C3)。
经过制动(变迁Brake)后列车降至库所C2(CTCS-2级)运行,若RBC恢复,则重联成功(库所success),RBC进入库所RBCready(RBC进入正常工作状态),列车呼叫RBC,请求行车许可(变迁ReqRBC),收到行车许可后进入库所RecRBC,升至CTCS-3级列车运行(变迁C3)。
4.2 时段2情况下RBC2故障切换流程
时段2的情况下RBC2故障的切换流程模型如图4。
库所normal代表列车正常行驶,车载向RBC1发送列车位置(变迁send),RBC1收到(库所receive)后向RBC2转发列车信息(变迁send2)。等待接收信息(库所waiting),计时6 s后(变迁timeout)若重联成功,进入库所success,直到接收到下一次的MA(变迁receive)后正常行驶。

图4 时段2情况下RBC2故障的切换流程模型
若重联未成功,进入库所fail,列车按原来的行车许可继续前进期间等待RBC2恢复(库所waiting),计时15 s(timeout1)后仍未恢复则切换失败,到达库所fail1,表示切换失败。
若成功则进入库所success1,恢复RBC控车(变迁receive),正常运行(库所run)。
4.3 时段3的情况下RBC2故障的切换流程
时段3的情况下RBC2故障的切换流程模型如图5。
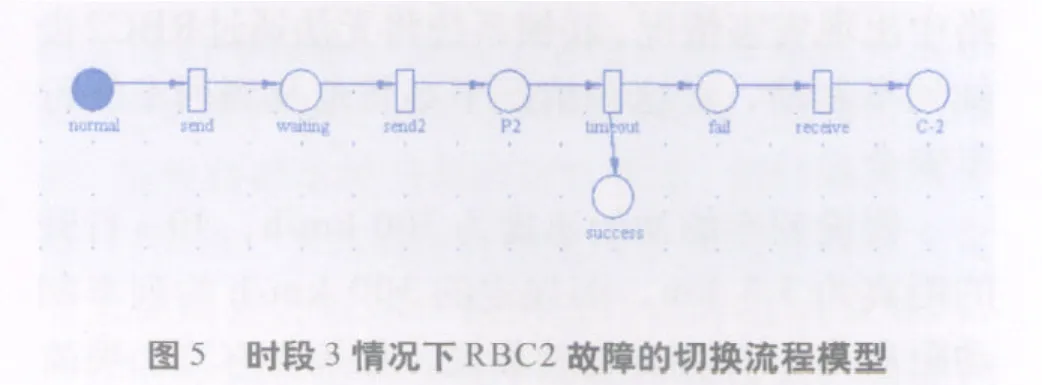
图5 时段3情况下RBC2故障的切换流程模型
库所normal代表列车正常行驶,此时列车在行驶完RBC1的行车许可后,向RBC2发送行车许可(变迁send),等待RBC2发送行车许可(库所waiting),再次呼叫RBC2(变迁send2),进入库所P2等待RBC2的行车许可,经过15 s(变迁timeout)后,若RBC回执信息,则进入success库所,若未接收到RBC2的信息,则进入库所fail(切换失败),接收CTCS-2的信息后(receive)进入库所C-2(降级到CTCS-2级行驶)。
5 模型求解及分析
用SPNP6.0对模型进行瞬态分析,得到的结果如表1。
时段2的情况下,RBC2故障的切换成功率趋于50.11%。
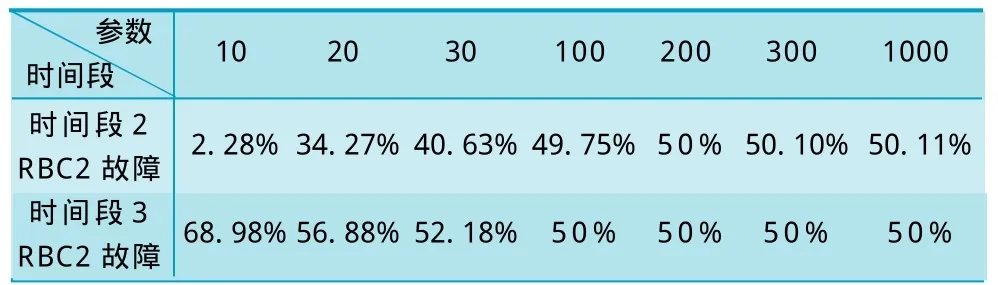
表1 SPNP6.0分析结果
时段3的情况下,RBC2故障的切换成功率趋于50%。
1台车载电台时,RBC2故障情况下切换成功率为:
(50%+50.11%)/2=50.05%
当列车头部越过切换点后,车载设备会向RBC1和RBC2发送位置报告,RBC2收到位置报告后会向RBC1发送接管信息,若此时RBC2故障无法与列车建立通信,则列车会按照RBC1之前发送的延长行车许可继续前进,当列车行驶完延长行车许可距离后仍无法与RBC2建立通信,则列车降到CTCS-2级允许的速度,系统将自动转换为CTCS-2级控车。但是,如果此时在延长行车许可距离(40 s正常行驶距离+完全制动距离)的线路中出现灾害情况,联锁系统将无法通过RBC2告知列车制动,在这种情况下必将危及到列车的行车安全。
假设列车的初始速度为300 km/h,40 s行驶的距离为3.3 km,而规定的300 km/h的列车制动距离为3.7 km,也就是说,如果RBC2出现故障,在RBC1发送的接近7 km的MA中无法确保列车的行驶安全,为避免此类情况发生,必须设置完善的安全预警装置,当线路变化时防灾传感器会通知联锁,这时联锁会将信息同时通知RBC1,再由RBC1通知列车。
当RBC2故障时,切换的成功率很低,非常不利于行车效率的提高,而当出现图6的情况更是威胁到了行车安全。
为避免以上情况的发生,需要设置完善的安全预警装置,尤其在切换点过后的一定距离内为确保列车的行车安全,联锁在向RBC2发送线路变化或临时限速信息时,应同时向交接的RBC1发送信息,这样在RBC切换时,若RBC2故障,则可由相邻的RBC1将信息及时通知列车,更新延长行车许可的信息,从而确保列车的安全行驶。图7 为RBC故障时防灾报警改进示意图。

图6 RBC故障示意图
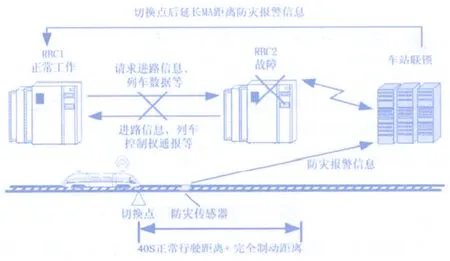
图7 RBC故障时防灾报警改进示意图
6 结束语
在CTCS-3列控系统中,RBC切换成功与否对列车运行的安全性和行车效率具有重要的意义。本文讨论了在不同切换时间段内,当RBC2发生故障时具有单台车载电台的列车切换成功率模型,分析了相应的切换成功率。由分析结果可见,不同时段的RBC故障在切换过程中对切换的影响各不相同。
本文真实地模拟了RBC切换中不同时段的故障场景,为计算各种情况下RBC故障对切换成功率的影响,以及提高行车安全可靠性提供了理论依据。
[1]牛 儒,曹 源,唐 涛. ETCS-2级列控系统RBC交接协议的形式化分析[J]. 铁道学报,2009(4):52-58.
[2]梁 楠. 基于随机Petri网的CTCS-3级RBC系统控车流程建模与分析[D]. 北京:北京交通大学,2009.
[3]林 闯. 随机petri网和系统性能评定[M]. 北京:清华大学出版社,2005.
猜你喜欢
实验室研究与探索(2020年11期)2020-12-11
中国粮食经济(2018年12期)2018-12-30
中国粮食经济(2018年10期)2018-12-30
中国粮食经济(2018年11期)2018-12-27
人大建设(2017年6期)2017-09-26
汽车与安全(2016年5期)2016-12-01
汽车维修与保养(2015年12期)2015-04-18
现代企业(2015年4期)2015-02-28
中国交通信息化(2014年4期)2014-06-05
天津科技大学学报(2014年4期)2014-02-27