
一种自适应标记分水岭算法的研究
2012-01-13 03:56何高明
梧州学院学报 2012年1期
汪 梅,何高明,贺 杰,郭 慧,陈 佳
(1.2.3.5.梧州学院 计算机科学系,广西 梧州 543002;
4.梧州学院 电子信息工程系,广西 梧州 543002)
一种自适应标记分水岭算法的研究
汪 梅1,何高明2,贺 杰3,郭 慧4,陈 佳5
(1.2.3.5.梧州学院 计算机科学系,广西 梧州 543002;
4.梧州学院 电子信息工程系,广西 梧州 543002)
介绍了分水岭算法的基本概念和原理,针对分水岭算法出现的过分割问题,提出了一种改进的标记提取的分水岭算法。该算法首先使用形态学梯度,并使用梯度重建技术,较好地增强了图像对比度,同时使用改进的标记提取方法对区域最小值进行标定,使用分水岭算法。从实验结果来看,该方法能有效地控制分水岭算法的过分割问题。
分水岭;标记提取;形态学
1 分水岭算法原理
分水岭算法,也被称为水线算法,20世纪70年代末由C.Digabel和H.Lantuejoul引入到图像处理领域的,最初仅用于对简单二值图像的处理。但由于分水岭算法的计算复杂度过高,所以一直没有得到学者们的重视。分水岭思想的真正发展始于20世纪90年代初,建立在LucVincent和S.Beucher以及同PierreSoille的共同研究的基础上,Vincent对原始分水岭算法的改进使它的计算速度提高了一个数量级,其思想及实现至今仍是广大学者关注的研究热点。分水岭变换的经典实现算法有很多[1-2],分水岭分割算法是一种基于拓扑理论和数学形态学的分割方法。其思想来源于地形学,顾名思义,就是根据分水岭的构成来考虑图像的分割,采用地形学作为其描述方法。假设把图像当成是一幅地形地貌图,图像中我们可以利用灰度和地貌的相似性来研究图像的灰度在空间上的变化。把图像中的每个像素的灰度值当成地形中的高度,并用这个灰度值代表该点在地形中的海拔。如果灰度值大,则海拔高。另外用集水盆表示图像中局部极小区域,即灰度的极小值。在采用分水岭方法进行分割时,首先确定这个地形图中的所有局部极小点,并在每个局部极小点处,或者是盆地的最低处刺穿一个小孔,使水慢慢上升,随着时间的变化,水将匀速地浸入一个集水盆中。为了防止两个不同的局部最小点对应的聚水盆汇合到一起,需要在它们的相接处建筑起一个水坝,当地形完全被浸没在集水盆以下时,所有的水坝就构成了分水岭。这一过程可以用图1来说明。
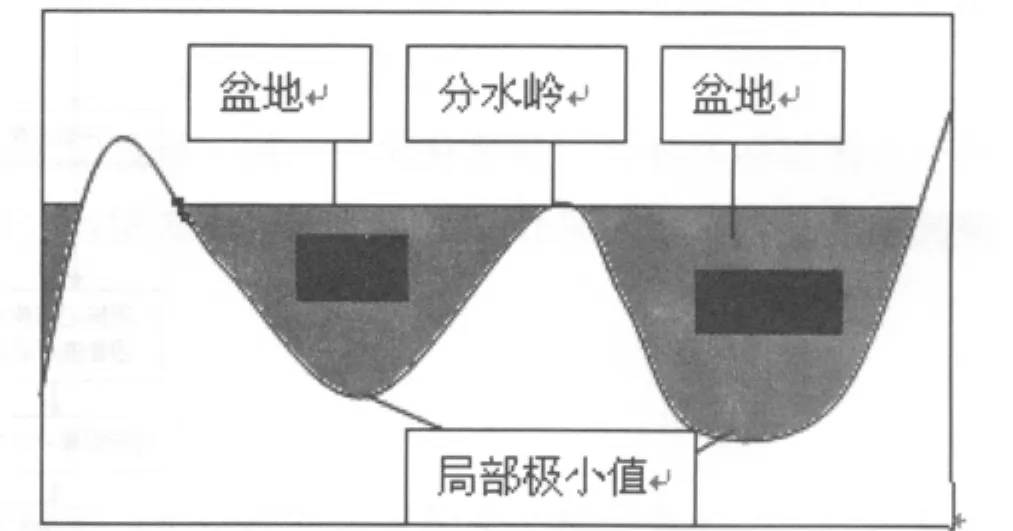
图1 分水岭示意图
2 分水岭算法存在的问题
标准的分水岭变换算法是建立在梯度图像区域极小值基础上进行的分割,由于图像噪声或其他原因的影响,在实际应用场合中,梯度图像中会出现很多的区域极小值,进而造成过分割现象。图像分割的结果是要将图像中感兴趣的目标区域分割出来,但过分割造成的后果却往往使分割的结果变得毫无用处。因此,在实际应用中,直接运用标准的分水岭变换算法往往难以得到满意的分割结果。
如何解决分水岭算法带来的过分割问题,一直是众多专家学者研究的热点问题。杜啸晓等人[3]提出了一种保持边界的图像分割方法,该方法引入了非线性扩散的方法,即先对图像进行平滑去噪,从而有效地减少了梯度图中的最小区域的个数,然后使用区域灰度相似性和层次融合方法,较好地解决了分水岭算法中的过分割问题。这种方法能提供较为精确的区域轮廓线。卢官明[4]提出的图像分割方法,不是对梯度图像进行的分水岭分割,而是直接将分水岭运用在原图像上,避免了信息的丢失,并采用了分形队列结构对图像进行扫描,将此算法应用在运动图像上也有较好的效果。
3 自适应标记提取的分水岭算法
3.1 算法描述
在对分水岭算法的改进算法中,标记提取方法与区域合并方法目前被一些学者广泛使用,因为这两种方法能较好地消除分水岭的过分割问题,以及图像中包含的噪声问题。另一种改进是对原图像进行预处理,例如采用滤波方式,但它只能作为一种辅助工具,但是本质上没有对分水岭算法起到实质性的帮助。为了解决分水岭的过分割问题,本文仍然使用标记提取方法。在传统的形态分割方法的基础上,先对图像采用形态学的方法求取梯度,并进行梯度重建,以增强梯度图像的对比度,然后对前景和背景分别进行标记提取,从而能抑制噪声所引起的过分割。但是本文做的改进是在原有的标记提取方法上采用自适应的标记提取方法来提取内外标记,并进行梯度重建,避免了传统的H-minima标记提取方法中对于阈值的盲目选取,而本文改进算法中能根据图像的统计特征选取阈值。最后以形态梯度图像的浮点活动图像进行分水岭变换,使过分割现象减轻,而且边缘定位更加精确。具体的算法可以用图2来表示。
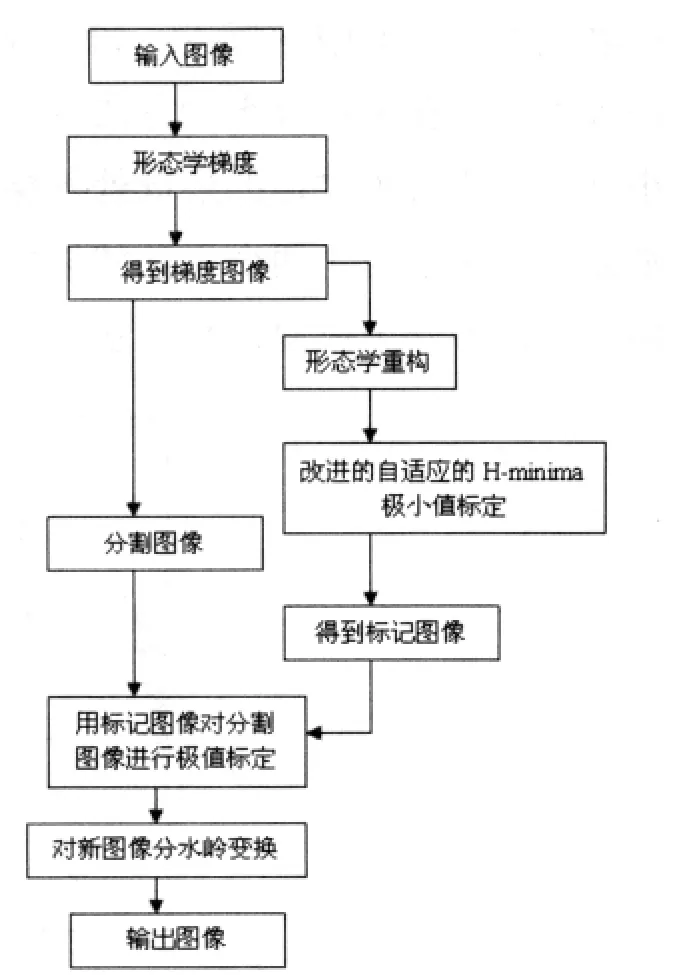
图2 本文算法流程图
3.2 算法实现
3.2.1 梯度计算
由于通过分水岭变换得到的图像是输入图像的集水盆图像,分水岭也就是指集水盆之间的边界点。显然,分水岭在图像中对应的是输入图像的极大值点。因此为得到图像的边缘信息,通常把梯度图像作为输入图像,即

上式中,f(x,y)表示原始图像,grad表示梯度运算。由于梯度图能较好地反映图像的变化情况,在原图像的梯度图上进行分水岭变换能取得更好的效果,分割后的结果更加准确。本文中采用形态学梯度的方法来求取梯度,因为形态学梯度能使输入图像灰度级变化更大,与前面介绍过的采用模板求取梯度的方法相比,形态学梯度方法对边缘的方向性依赖更小。最终的分水岭变换将在被标记图像修改后的梯度图像上进行,以此获得最终的分割结果。常见形态学边缘检测算子包含膨胀型、腐蚀型、膨胀腐蚀型。下面是对这几种算子的介绍。

上面式(2)、式(3)、式(4)中,X为图像集合,B为结构元素,+为膨胀运算符, I为腐蚀运算符。
3.2.2 形态学重构
在求得梯度图后,如果直接采用分水岭算法,梯度图中每个独立的局部谷底都被划分为不同区域,这样会导致图像区域的过分割。由于图像中包含有许多彼此连通但是大小不同的对象,为使得通过分水岭变换后得到的低谷数目最小,即区域极小值最少,通常的做法是对图像进行变换,使我们感兴趣的目标对象的对比度达到最大,即对比度增强。一个常用的方法是应用高帽(top-hat)变换和低帽(bottom-hat)变换。Top-hat变换定义为:

其中·为形态学闭运算,X为原图像,B为结构元素。
分水岭分割通过从图像中提取区域极小值,进而确定该极小值对应的分界线。分界线反映的是图像中强度剧烈变化的分界线,在提取区域极值时,通常先对图像进行对比度增强处理,以突出图像中的明暗变化。图像增强变换定义为:

3.2.3 自适应的标记提取方法
标记概念的提出主要是为了控制分水岭中的过度分割。由于在实际应用中,标记点的选取往往是从得到的区域极小值点中间选择,但是由于噪声的影响,为了能达到满意的分割效果,需要消除因此产生的一些区域极小值点,采取的方法往往是对梯度图像进行修正或平滑等预处理。Soille提出的强制最小技术已经被广泛用于分水岭分割的标记提取[5]。而标记提取方法的基本思想是对输入图像的梯度图设置一个阈值,如果梯度值小于该阈值的点,则将该点作为标记点,这样可以减少分水岭分割后的区域数,能较好地抑制分水岭的过分割现象。文献[5]使用了一种H-minima标记技术来提取标记。H-minima变换是一种有效提取标记的方法,H-minima变换的表达式如下:

H-minima变换的原理是给定一个阈值h,通过与h比较,消除那些深度低于h的局部极小值,提取满足条件的极小值,最终得到标记图像。这种方法的优点是可以直接给定阈值,但这同时也是它的缺点,就是因为H-minima方法给定的阈值是固定的,提取标记后的图像结果仅仅依赖于此预先设定的阈值,而没有将集水盆尺度联系起来。但是实际上,根据分水岭算法的原理,图像中的极小值点的深度为某区域极大值点与该极小值点之间的差值,而给定的阈值主要是用来限制由于灰度值的微小变化而引起的过度分割问题,所以这个阈值应该与该区域的极大值点和极小值点有联系[6]。也就是说可以根据极大值点和局部极小值点的相关特性来确定相应的阈值。本文的做法如下。
1.找出梯度图像中的极大值点与极小值点集合。根据梯度计算方法求取原图像的梯度图像,并找出每个区域的极大值与极小值,构成两个集合Imax和Imin。
2.求出极大值点集合的平均值与极小值点集合的平均值,以及其方差。分别求出Imax和Imin的平均值与方差。
3.消除较弱的极大值点,并重新计算均值,主要方法是如果这些极大值点集合中有灰度值小于其均值的,就将其消除,再用此均值与方差计算得到最终阈值。通过确定的阈值能将某区域中的极大值与极小值联系起来,并且能限制过度分割问题。
4.利用第3步得到的阈值,再采用H-minima标记提取方法对图像进行标记,得到标记图像。
使用上述方法后再进行分水岭算法时,首先对梯度图中的区域极小值进行标定,然后以这个极小值作为山谷,搜索这个极小值的邻域像素点,如果其灰度值相近,则把它设置为背景或前景。如果相邻的两个极小值点所对应的区域像素相遇,就将这两个点当成区域轮廓的像素点。使用此方法进行迭代,分割结束时所有的区域极小值对应的轮廓像素点全部被确定和标记。
3 实验结果及分析
为了验证本章算法的可行性,本实验选取了几幅有代表性的图像,用Matlab进行仿真,下页图3是实验结果图。
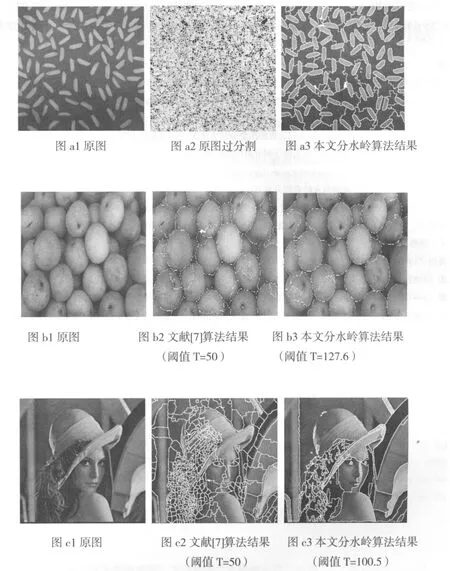
图3 实验结果分析图
从上面的实验图可以看出,在原图上直接运用标准分水岭变换,存在明显的过分割现象,导致分割后的结果几乎无意义。本文通过局部极大值平均值与极小值点集合方差计算出来的阈值来消除一些伪区域,并获得更加适量的区域。该文献中预先设定了进行标记提取前的阈值T为50,当然这一数值可以改变,本文分别选取了阈值50、80即200进行实验,该算法的不足也体现出来,即当阈值不同时,经过分水岭计算后结果也不同,阈值越大,分割区域越大,区域数目越少,但是细节体现得越不明显。而本文算法中,不用预先设定阈值,在标记提取时,会自动根据图像的特性统计出阈值。和文献[7]的方法对比,本文算法得到的结果图中伪区域个数更少,能较为正确地将目标从背景中分离出来,因此本文算法效果更好。
[1]廖毅.基于显著性分析的分水岭分割算法[J].系统仿真学报,2007,19(2):232-237.
[2]Gonzalez C R,Woods R E.Digital Image Processing[M].Seconded ition.Beijing:Publishing House of Electronics Industry,2002:618-626.
[3]杜啸晓,杨新,施鹏飞.一种新的基于区域和边界的图象分割方法[J].中国图象图形学报,2001,6(8):755-759.
[4]卢官明.区域生长型分水岭算法及其在图像序列分割中的应用[J].维普资讯,2000,20(3):51-54.
[5]Sonka M,H lavacV Boyle R.Image processing,analysi,and machine vision(2nded)[M].Books/Cole Publishing,1999:576-577.
[6]谭洪波.基于自适应标记提取的分水岭彩图分割算法[J].计算机工程,2010,36(19):229-231.
[7]王国权,周小红.基于分水岭算法的图像分割方法研究[J].计算机仿真,2009,26(5):255-258.
O243
A
1673-8535(2012)01-0059-06
2011-12-08
汪梅(1981-),女,湖北洪湖人,梧州学院计算机科学系讲师,广西师范大学研究生,研究方向:计算机应用技术、图像处理。
何高明(1980-),男,湖北通城人,梧州学院计算机科学系讲师,广西师范大学研究生,研究方向:嵌入式系统。
贺杰(1982-),男,湖南桃江人,梧州学院计算机科学系讲师,广西师范大学研究生,研究方向:图像处理。
郭慧(1981-),女,广西梧州人,梧州学院电子信息工程系讲师,广西师范大学研究生,研究方向:图像处理。
陈佳(1982-),女,重庆大足人,梧州学院计算机科学系讲师,广西师范大学研究生,研究方向:图像处理。
覃华巧)
猜你喜欢
西江月(2021年3期)2021-12-21
长江丛刊(2020年13期)2020-11-19
中学数学研究(江西)(2020年5期)2020-07-03
中学数学研究(江西)(2019年11期)2019-12-31
兽医导刊(2019年1期)2019-02-21
西江月(2018年5期)2018-06-08
科技风(2018年19期)2018-05-14
百姓生活(2017年5期)2017-05-15
自动化学报(2017年1期)2017-03-11
文史春秋(2016年3期)2016-12-01
