基于矫正解的经过预定三位置的四杆机构设计
2012-01-15 02:54徐春涛廉哲满
延边大学学报(自然科学版) 2012年1期
徐春涛,廉哲满
(延边大学工学院 机械工程系,吉林 延吉133002)
基于矫正解的经过预定三位置的四杆机构设计
徐春涛,廉哲满*
(延边大学工学院 机械工程系,吉林 延吉133002)
对经过预定三位置的四杆机构设计方法及四杆机构转动时出现的顺序问题、转移问题等进行了研究,并提出了解决方法.基于研究结果,研发了经过预定三位置的四杆机构设计软件.在该软件的界面上可直观地观察设计完成的四杆机构驱动杆的角度、机构的转动角、连杆的运动路径、驱动四杆机构时可能发生的分支问题等,并可判断所设计的四杆机构是否满足设计要求,因而可缩短合理设计四杆机构的时间.
四杆机构;三位置;转移问题
0 引言
四杆机构是机械传动中常见的传动机构,广泛应用于各种机械装置中.目前,四杆机构的设计方法有很多,但这些方法如设计不当就会出现很多问题[1-2],如机构不能转动、转动时经过点的顺序不正确、连杆不能完全回转等,给初学的设计者带来诸多不便.对此,研究者对四位置铰链四杆机构综合与分析的可视化软件[3],VC调用MATLAB引擎实现可视化综合三位置铰链四杆机构的方法进行了研究[4].本文对经过预定三位置的四杆机构设计及其转移问题进行了研究和探讨,并研发了仿真设计软件,为解决上述问题提供了新的方法.
1 三位置的综合分析
1.1 利用已知转动点计算固定点
设计经过预定三位置的四杆机构时,在给定转动点坐标的情况下(图1为转动点的位置关系图),求解固定点坐标的计算方法可描述如下:
式中:(X1,Y1)、(X2,Y2)、(X3,Y3)为转动点相对于全局坐标系[G]的坐标值;(x1,y1)、(x2,y2)、(x3,y3)为转动点相对于连杆上动坐标系的坐标值;(p1,q1,θ1)、(p2,q2,θ2)和(p3,q3,θ3)为3个预定位置坐标值.
由于式(1)和式(2)中的(x1,y1)和(x2,y2)为转动点相对于连杆上动坐标系的坐标值,所以(x1,y1)和(x2,y2)的坐标值相同,为此联立式(1)和(2)得

图1 转动点的位置关系

由式(3)可知,当(X1,Y1)坐标已知时,(X2,Y2)坐标可以通过式(3)求解.
伴随着后金融危机时代的发展,国际金融监管体系框架不断完善与重构,国际会计框架格局也做出了相应调整,各国会计制度的不断完善对国际财务报告准则提出了更高要求,随着经济全球化与一体化,欧美主导的国际财务报告准则逐渐被打破,第三世界发展中的国家地位不断提高,使得更多新兴经济国家参与到国际财务报告准则的制定中,从现定准则标准来看,国际会计准则理事会的目标并不是偏袒发达国家,而现状仅仅是停留在欧美主导的趋同层面,而真正的目标是实现全球使用一套公平透明且高效的会计准则。
(1)病毒感染类型疾病。现有治疗经验表明,针对病毒感染类型的疾病目前并没有特效的治疗药物,因此,防疫人员可选择使用早期发病猪群康复猪的血清进行治疗[3]。为避免细菌性继发感染,可选择抗生素进行辅助治疗,但防疫人员应避免大剂量或反复多次使用退热及激素类药物,这一类药物的大量使用可能会导致猪的免疫力降低,自身难以产生有效的抗体,再次感染病毒的概率不能得到有效控制。因此,防疫人员仍应针对用药方案对病猪肝脏、肾脏等的影响进行考量,尽量将药物导致的肝脏损伤降低到最小。
当地丘陵较多,主要种植一季作物,以水稻、玉米为主,现阶段处于用肥淡季。在国家化肥使用零增长政策影响下,当地农民施肥结构有所转变,今年化肥总体销量有所下降,尤其今年单质肥的销量有所降低,而新型肥料销量有所增加,原因有三:一是新型肥料利润较高,经销商推广力度较大;二是新型肥料效果较突出,农民愿意接受;三是农民用肥开始注重节约劳动力。

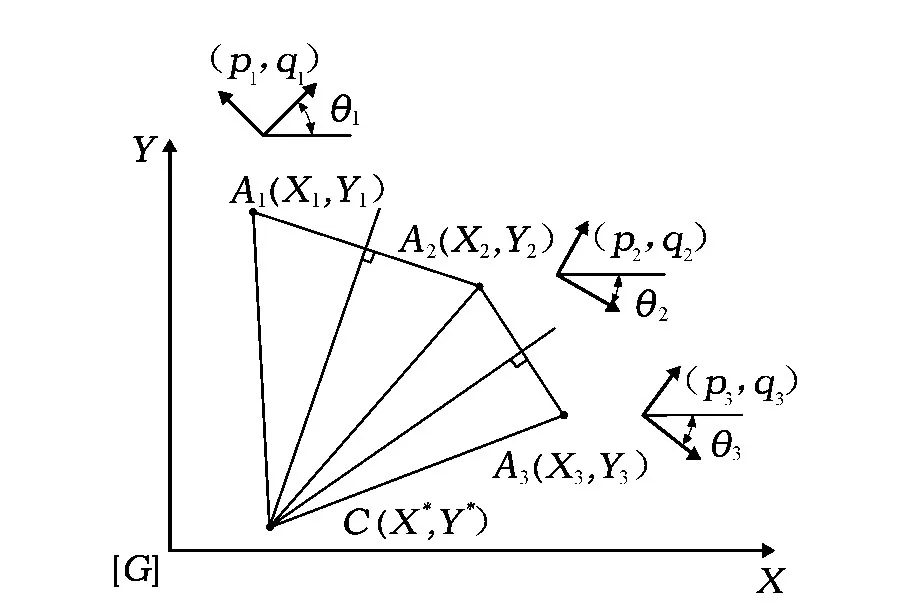
图2 固定点的轨迹
其中(X*,Y*)为相对于全局坐标系[G]的固定点坐标值.整理式(4)得

其中:A=2(p1-ap2)-2bq2-2X*(1-a)+2Y*b,B=2(q1-aq2)+2bp2-2Y*(1-a)-2X*b,C=(p22-p21)+ (q22-q21)-2c1p2-2c2q2+2X*c1+2Y*c2.
设计经过预定三位置的四杆机构时,在给定固定点的坐标情况下,转动点坐标的计算方法可描述如下:


1.2 利用已知固定点计算转动点
根据以上推导过程,由设计点1和设计点3来计算固定点坐标(X*,Y*),其关系式为

其次,计算设计点1和设计点3为转动点的坐标轨迹,其关系式为
(29)溪苔 pellia epiphylla(L.)Cord.XIANG Jun等(2010 年);余夏君等(2018)
如图3所示,固定点到3个转动点(相对于3个设计点,即预定位置)的距离相等,即

联立式(8)和(9)可得转动点坐标(X1,Y1)(相对于设计坐标1)的关系式:

首先,计算设计点1和设计点2为转动点的坐标轨迹,其关系式为

其中a=cos(θ2-θ1),b=sin(θ2-θ1),c1=p2-p1cos(θ2-θ1)+q1sin(θ2-θ1),c2=q2-p1sin(θ2-θ1)-q1cos(θ2-θ1).

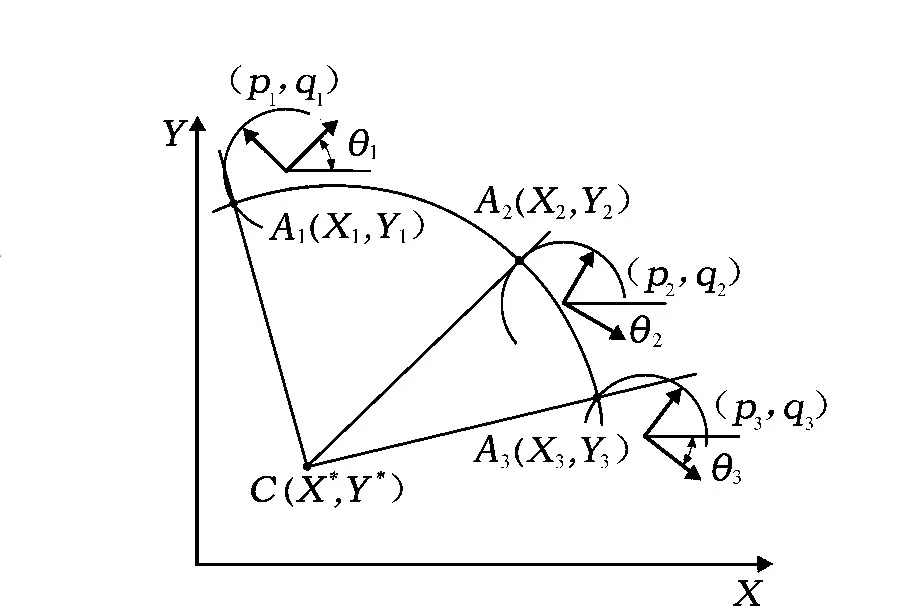
图3 转动点的轨迹
由图2中固定点的轨迹所示,固定点(X*,Y*)的轨迹在设计点1和设计点2(已知预定位置)的垂直平分线上,其轨迹的斜率为轨迹方程为

“我晓得你说的谁了。姓陈,对吧。他好像也是一样,二年级就又转学走了。他家里做服装生意的,到处跑,冇得歇脚。”
同理,可求得转动点(X2,Y2)和(X3,Y3)的坐标值.
1.3 在转动点运动区域解决转移问题
基于三位置综合分析的四杆机构设计,在选择被驱动杆转动点时,需要在不发生转移问题的区域内选择转动点,以解决转移问题.
给定设计坐标的Image pole[5-6]和Driven-coupler角的变化角(ψik)的关系如图4所示.图中,ψik为连杆经位置i向位置k移动时,连杆角的变换角(连杆与被驱动杆延长线所成角).
四杆机构不发生转移问题的条件为连杆角小于π.同时,3个连杆角的变换关系为
激光氧分析仪A表和B表均测量再生炉内的氧体积分数,2台表均在同一水平线,平行距离约1 m,但在实际测量中A表和B表的测量偏差值达到±(0.3%~0.7%)。起初怀疑是其中1台仪表的管线漏气,使空气中的氧进入管道,导致仪表测量值高于另外1台仪表,试漏密封处理后,2台仪表仍然存在偏差。结合工艺流程及工艺设计后发现,工艺再生炉视窗存在一路仪表风,其作用是冷却视窗,由于该仪表风距离2台仪表测量点较近,导致仪表测量值存在偏差。关闭该仪表风后,2台仪表测量值接近,但由于该冷却风作用是保护视窗,设计要求不能关闭,重新打开仪表冷却风,2台仪表之间又出现了偏差值。
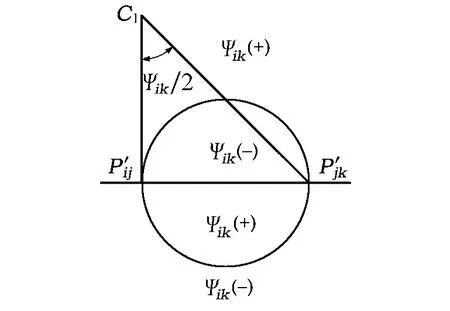
图4 连杆角随着转动点的变换

如果式(14)中ψij、ψjk的符号为(+),ψik的符号为(-),则由符号法则可知ψij+ψjk>π,所以可以推断出在连杆上定义的坐标在由设计点i向设计点k移动时发生转移问题.以此方法,表1中给出了机构在转动时可能发生的所有情况.
同时,通过图4可归纳出可能发生转移问题的2种情况:ψij、ψjk、ψik的符号分别为(+)、(+)、(-)和(-)、(-)、(+),即图5中没有阴影的部分.总之,如果在没有阴影的区域选择被驱动杆转动点,即使在被驱动杆设计之后,无论怎样设计驱动杆,机构都会发生转移问题;但如果在阴影区域选择被驱动杆转动点来设计被驱动杆,则可以通过Filemon Construction[7]来解决转移问题.
③多年调节和年调节水库可以先蓄,季调节水库后蓄。多年调节和年调节水库兴利库容占河流年径流量比例大,蓄水需要的时间比较长,而且这样的水库大多数分布在二、三级支流上,可以考虑先蓄水。
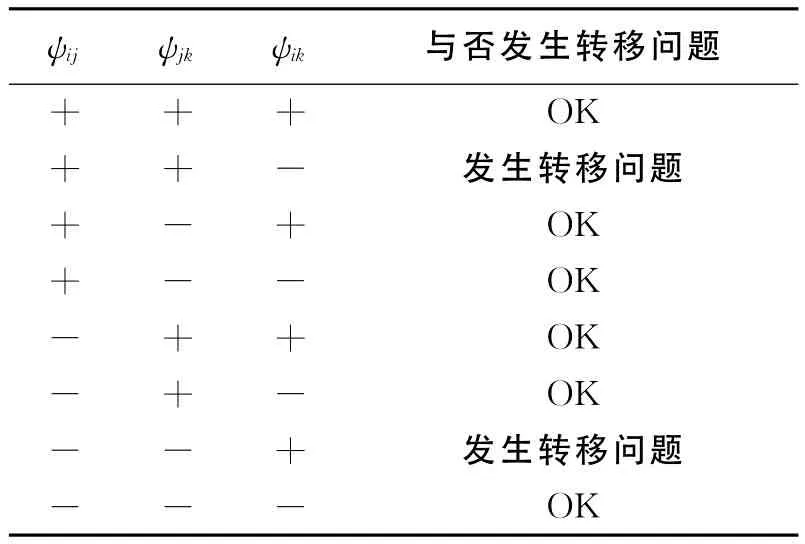
表1 是否发生转移问题的判断

图5 发生转移问题的区域
2 软件开发
本研究开发的四杆机构设计软件的界面如图6-9所示.图6对话框为相对于基准坐标系给定三位置的x,y坐标和角度的输入界面.图7左侧界面显示的是相对于给定三位置的被驱动杆位置,右侧工具栏显示的是被驱动杆的转动点和固定点的坐标.图8显示的是在驱动杆转动点运动区域出现转移问题的区域,设计者可以通过按住鼠标左键,在界面上选择驱动杆转动点的位置(阴影区除外);当放开鼠标左键时,会自动画出驱动杆固定坐标,并在画图界面显示相对于给定位置[0]、[1]、[2]的四杆机构.图9左侧界面显示的是相对于给定三位置的四杆机构的位置,右侧的工具栏显示的是驱动杆的转动点和固定点的坐标.在图9左侧界面中,可以看到连杆上的固定坐标在经过坐标[0]→[1],[1]→[2],[0]→[2]时,驱动杆旋转角都小于180度(符号为+).
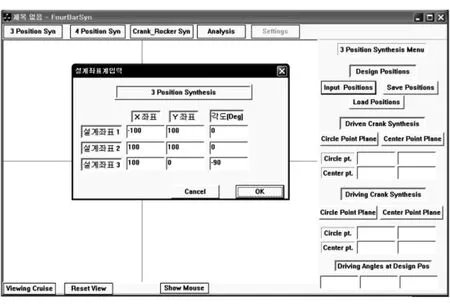
图6 坐标输入界面的设计
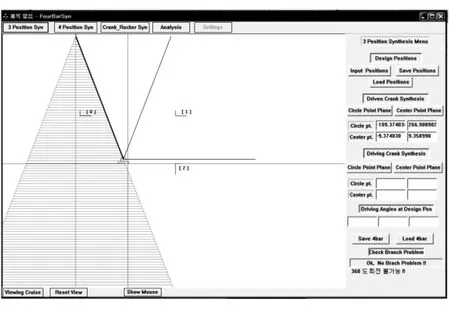
图7 被驱动杆的设计
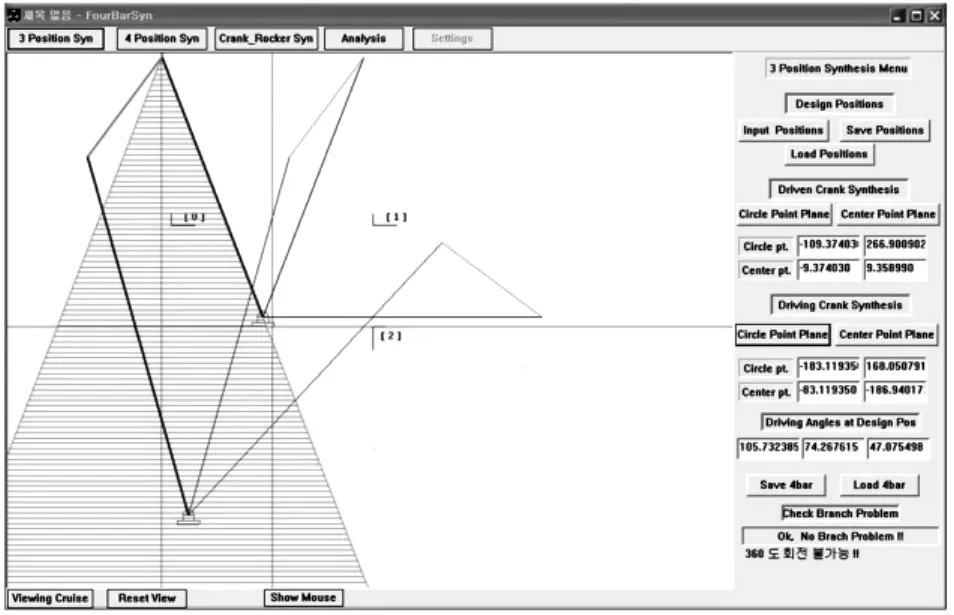
图8 驱动杆的转移问题
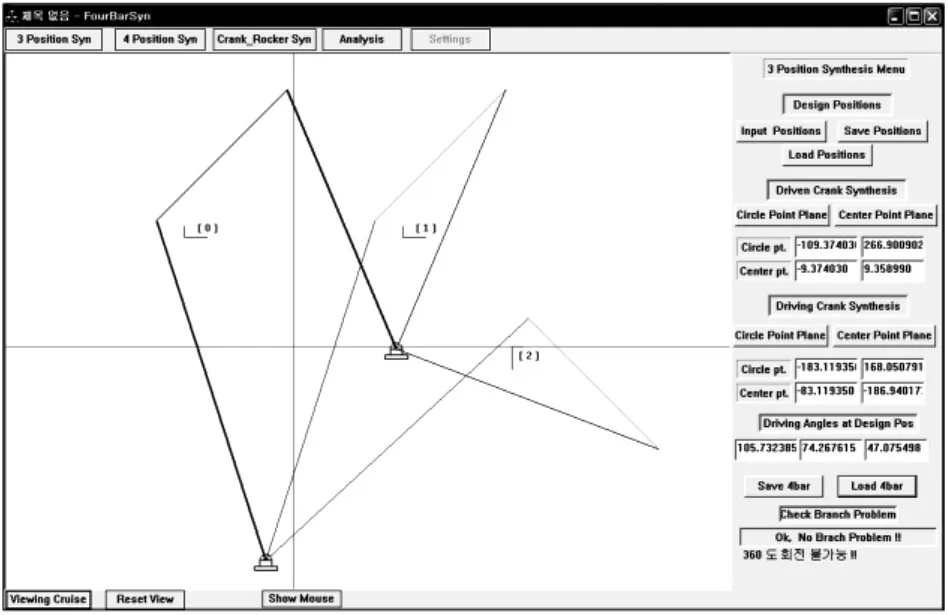
图9 经过给定三位置的四杆机构
3 结论
本文对经过预定三位置的四杆机构设计及其转移问题进行了探讨,研发了仿真设计软件.该软件可便捷地设计连杆上定义的坐标点以最小路径经过3个已知设计坐标点的四杆机构,设计完成的四杆机构驱动杆的角度、机构的转动角、连杆的运动路径、驱动四杆机构时可能发生的分支问题等都可在所开发的软件上通过界面直观地观察,并能够判断所设计的四杆机构是否能满足设计要求,因而可缩短合理设计四杆机构的时间.另外,此软件具有基本命令的工具栏,使用者通过鼠标和键盘实行命令时,所有的输入和输出信息都以对话框的形式显示在工具栏上,便于使用者快速地了解其使用方法.
[3]李振华,徐学林,高自成.VC调用Matlab引擎实现可视化综合三位置铰链四杆机构的方法[J].林业机械与木工设备,2006,34(11):32-34.
[4]谭晓兰,韩建友,陈立周.四位置铰链四杆机构综合与分析的可视化软件系统[J].机械设计,2004,21(7):58-60.
[1]Waldron K J,Strong R T.Improved solutions of the branch and order problems burmester linkage synthesis[J].Mech Mach Theory,1978,13(2):199-207.
[2]Waldron K J.Elimination of the branch problem in graphical burmester mechanism synthesis for four finitely separated positions[J].ASME Journal of Engineering for Industry,1976,98(2):177.
[5]PRENTIS J M.The pole triangle,burmester theory and order and branch problem:I(the order problem)[J].Mech Mach Theory,1991,26(1):19-30.
[6]PRENTIS J M.The pole triangle,burmester theory and order and branch problem:II(the branching problem)[J].Mech Mach Theory,1991,26(1):31-39.
[7]Filemon E.In addition to the burmester theory[C]//Proceedings of the third world congress for theory of machines and mechanisms.Kupari:Yugoslavia,1971,D:63-78.
Three position synthesis of 4-bars mechanism based on solution rectification
XU Chun-tao,LIAN Zhe-man*
(DepartmentofMechanicalEngineering,CollegeofEngineering,YanbianUniversity,Yanji133002,China)
The methods of designing 4-bars mechanism passing three designed positions and several problems(branch problems)occurring during the 4-bars mechanism’s performances are studied,and the solving methods are proposed.The design software of 4-bars mechanism passing three designed positions is developed based on the above results.The angle of driving link,angle of rolation of mechnism,the motion path of link,the branch problems of 4-bars mechanism can be observated directly on the software interface,and whether or not to meet the design requirements can be convenienely judged,so the time of rational designing the 4-bars mechanism can be shorten.
4-bars mechanism;three position;branch problems
TH122
A
1004-4353(2012)01-0087-05
2011-11-25
*通信作者:廉哲满(1964—),男,博士,教授,研究方向为CAD/CAM及仿真技术.
猜你喜欢
农业装备与车辆工程(2022年5期)2022-10-31
仪器仪表用户(2022年4期)2022-04-01
仪器仪表用户(2022年3期)2022-03-04
汽车零部件(2020年4期)2020-05-25
汽车实用技术(2019年21期)2019-11-22
汽车实用技术(2018年2期)2018-05-24
汽车实用技术(2017年16期)2017-09-21
汽车工程师(2017年2期)2017-08-17
汽车工程学报(2017年2期)2017-07-05
汽车维护与修理(2016年10期)2016-07-10