基于小波分解的弯道识别技术
2012-01-19 12:15杜毓皓张亚岐
电子科技 2012年8期
杜毓皓,张亚岐,李 健
(长安大学汽车学院,陕西西安 710064)
基于小波分解的弯道识别技术
杜毓皓,张亚岐,李 健
(长安大学汽车学院,陕西西安 710064)
为了保障车辆安全有效的通过弯道,准确识别弯道曲率尤为重要。因此,文中提出一种基于小波分解的弯道识别技术,该算法通过车载CCD实时采集自车前方的车道线的图像信息,对采集的图像进行小波去噪以及小波边缘检测,最终准确辨识车道线,通过曲线拟合确定道路的曲率半径。经试验验证,该算法能准确辨识出弯道的曲率半径。
弯道识别;小波分解;曲线拟合
车辆在弯道行驶时少有产生变道行为,因此在弯道上行驶时,近似认为车辆始终处于车道保持状态。且新手驾驶员路感差,通过弯道时不能准确控制车速,易造成交通事故,且在交通流量较大的路段,快速高效地通过弯道路段对改善交通流量有帮助。因此,寻求简单易行的弯道超速预警算法成为研究人员关注的焦点。文中在此基础上提出了基于小波分析的弯道识别技术,一方面,通过车载CCD实时采集车辆前方道路信息,利用小波分解对采集回来的图像进行去噪、边缘检测处理,经过坐标变换转换成实际道路曲线弧长,确定道路的曲率半径;另一方面,通过车载加速度传感器实时采集车辆横向和纵向加速度,经过推导得到车辆超速比,单片机通过超速比的大小来提醒驾驶员当前车速是否超速,若超速,则单片机控制蜂鸣器会提醒驾驶员当前车速过高,以当前车速通过该路段有危险,因此,该算法结合车载传感器采集回来数据对车辆超速进行预警。目前,图像去噪方法甚多,较为成熟的有:均值滤波、中值滤波、高斯滤波[1]以及双向滤波等。这些方法简单,对去除与信号不相关的噪声效果也较为理想,但是,这些方法易造成边缘和纹理的模糊。文中利用小波分析去噪,再进行边缘提取,最终准确确定道路曲率半径。该方法精度高、稳定性好,对改善交通堵塞具有一定的辅助作用,且检测结果与实际结果吻合度高。
1 小波分析
1.1 小波分析
小波被誉为“数学显微镜”,在时频两域具有较好的局部特性。将信号f(t)进行小波级数分解

式中,Ψj,k(t)为小波函数;dj,k为小波系数,且为小波函数的共轭函数,小波是级数的两重求和,同时兼有频率指标j和时间指标 k,小波函数

式中,j为伸缩参数;k为平移参数。小波变换的窗口是可调的时频窗,尺度因子j不仅改变小波的频谱结构,而且改变时频窗口的大小。若j大,此时对应低频端,频率分辨率高,时间分辨率低;若j小,对应高频端,频率分辨率低,时间分辨率高。
1.2 像素距离向实际距离的转化
图1是摄像机倾角成像原理图。

图1 摄像机倾角成像原理图
图1中,F为镜头的光心位置;虚线为主光轴;M,N分别为镜头视角的上下端点;A,B为成像物体的上下端点;C,D分别为A,B两点在图像中的成像位置;L为焦点到垂直平面距离。当A点在镜头主光轴的上部,B点在下部,则
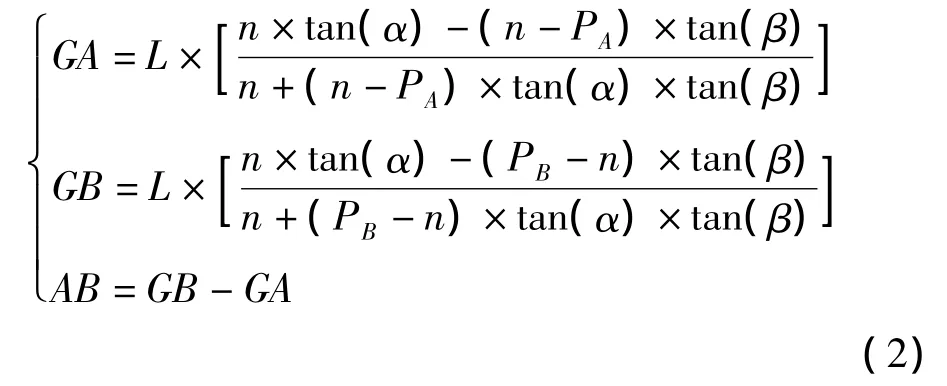
式中,2n为视角内总的像素;PA,PB分别为 A,B两点像素值。AB就为物体的实际长度。其他两种情况跟上述情况相似,只是A,B点在主光轴的位置不同。
2 试验验证
2.1 弯道识别
试验采用摄像头拍摄的照片,并利用Matlab语言[2]对其进行图片处理。小波函数选用的是dB2,进行2层分解。为最大限度的保障安全,选用图2(a)中右边线作为弯道弧线,试验中对各个车道线曲率半径均进行拟合,挑选曲率半径最小的弯道作为当前弯道曲率半径。

由图3可以看出,小波去噪后能够较好地保持图像的边缘特征,小波多尺度分解能够细化图像边缘,为精确提取图像边缘特征提供有效的数据支撑。进行3次曲线拟合如图4所示。

图4 曲线拟合
拟合关系式f(x)=p1*x3+p2*x2+p3*x+p4;p1=1.594e-005;p2=-0.013 6;p3=4.46;p4=-340.4;将该段曲线近似看作一段弧长,经过坐标变换得出弯道的曲率半径为725.33 m。实际弯道的曲率半径为719.9 m,误差为1%。
2.2 预警方案
弯道超报警辅助装置包括车辆横向加速度传感器,纵向加速度传感器,速度传感器,8051单片机以及报警装置。当自车行驶到弯道时,车速传感器、车辆横向加速度传感器以及纵向加速度传感器采集车辆的运动参数,将车辆的运行参数经过A/D转换器输入单片机,在单片机内进行简单运算后,根据判定条件,单片机直接控制蜂鸣器是否作用。在单片机内需要计算车辆通过弯道的最大速度vmax,由于车辆在转弯时很少变道,因此,忽略弯道处车辆的变道情况。且不考虑车辆质心侧偏角的影响,计算车辆通过弯道的最大速度vmax公式如下

其中,R为转弯的曲率半径;v为车辆的速度,ax通过传感器采集;为车辆的纵向加速度,通过加速度传感器采集;aymax为最大横向加速度,通过加速度传感器采集;vmax为车辆通过弯道的最高车速;v为车辆当前的速度,通过速度传感器采集。u为路面的附着系数,一般取0.7。也可通过仪器采集获得。
联立以上3式可以求得超速比λ

在单片机内判断超速比是否>1,如果超速比λ>1时,表明此时车辆的速度过高,此时单片机控制报警装置发出警报,提醒驾驶员以当前的速度v通过该弯道时会有危险。如果当前超速比λ>1时,报警装置不起作用,说明此刻的车速低,以当前的速度v直接通过该弯道不会有危险。因此,这种弯道超速报警装置可以有效地提高弯道处车辆的通行能力,降低弯道处由于车速高而引起的交通事故。且在夜间行驶时,这种弯道超速报警装置可以明显改善事故多发路段的交通状况。

图5 预警方案图

图6 汽车稳态转向运动简图
其中,忽略车辆的质心侧偏角,即认为图中的ax与v在同一方向上。v为车辆的质心速度;ax,ay分别为车辆横向加速度和纵向加速度;w为车辆的横摆角速度;P为弯道的曲率中心;R为弯道的曲率半径。
3 结束语
通过对采集的车道线图像信息进行小波去噪,充分保留图像边缘特征,为后续弯道识别提供了可靠数据支撑,而后进行小波边缘检测[3-5],提取图像轮廓,通过图像灰度值梯度变化率确定各个车道线,运用3次曲线拟合,确定车道线的弧长,经坐标变换最终确定弯道的曲率半径。该方法充分利用小波良好的局部性质,且通过车载传感器实时采集车辆运动参数,根据判定条件决定报警单元是否报警,这样可以有效提高车辆通过弯道的速度,为保障行车安全提供技术支持。
[1]吕玉琴,曾光宇.基于图像边缘检测算法的研究[J].太原科技,2009(2):31-33.
[2]张善文,雷英杰,冯有前.Matlab在时间序列分析中应用[M].西安:西安电子科技大学出版社,2007.
[3]甘亚辉,戴先中,李新德,等.小波边缘检测在焊缝图像处理中的应用[J].华中科技大学学报:自然科学版,2008,36(增刊 I):65 -67,86.
[4]贾超,王耀坤,邢晶晶.利用小波多尺度积实现裂纹缺陷的边缘检测[J].计算机工程与应用,2011(15):219-221.
[5]姜涌,曹杰,杜亚玲,等.基于形态学梯度矢量的图像边缘提取算法[J].南京航空航天大学学报,2005,37(6):771-775.
Technology of Winding Roads Based on Wavelet Decomposition
DU Yuhao,ZHANG Yaqi,LI Jian
(School of Automobile,Chang'an University,Xi'an 710064,China)
In order to ensure that vehicles go through winding roads safely and effectively,accurate identification of the bend curvature is particularly important.Therefore,this article proposes a technology of identifying winding roads based on wavelet decomposition.This algorithm collects the real-time road images with vehicle-mounted CCD.The wavelet of the collected images is then de-noised and its edge detected.Finally the lane's line is accurately identified.The curvature radius is determined through curve fitting.Experiments show that this algorithm can accurately identify the curvature radius of the winding roads.
corners to identify;wavelet decomposition;curve fitting
TP206
A
1007-7820(2012)08-093-03
2012-01-03
国家道路交通安全科技行动计划基金资助项目(2009BAG13A05)
张亚岐(1986—),男,硕士研究生。研究方向:车辆主动安全及ACC自动巡航控制。杜毓皓(1987—),男,硕士研究生。研究方向:车辆主动安全及ACC自动巡航控制。
猜你喜欢
中国港湾建设(2022年12期)2022-12-28
数学物理学报(2022年4期)2022-08-22
数学物理学报(2022年2期)2022-04-26
科技风(2021年19期)2021-09-07
电子制作(2019年13期)2020-01-14
数学物理学报(2019年5期)2019-11-29
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
制造技术与机床(2017年10期)2017-11-28
作文周刊·小学一年级版(2017年27期)2017-08-10