汽车ABS模糊参数自整定PID控制方法的仿真研究
2012-02-03 08:46罗映红
自动化仪表 2012年8期
张 凤 罗映红
(天津铁道职业技术学院铁道动力系1,天津 300240;兰州交通大学自动化与电气工程学院2,甘肃 兰州 730070)
汽车ABS模糊参数自整定PID控制方法的仿真研究
张 凤1罗映红2
(天津铁道职业技术学院铁道动力系1,天津 300240;兰州交通大学自动化与电气工程学院2,甘肃 兰州 730070)
防抱死制动系统(ABS)是汽车安全系统的重要组成部分,对行驶路面状况进行实时准确的自动识别和提高ABS控制算法的鲁棒性具有重大意义。通过仿真分析,提出了一种简单有效的路面识别算法,并设计了以最优滑移率为控制目标的模糊PID控制器。结合车辆模型,对该系统在变附着系数路面的运行情况进行了仿真。结果表明,该系统能够及时判断出路面状况的变化,自动调节控制器参数,使车辆获得最大地面制动力。
防抱死制动系统(ABS) 滑移率 路面识别 模糊PID控制 仿真
0 引言
防抱死制动系统(anti-lock breaking system,ABS)是一种具有防滑、防抱死等优点的安全刹车控制系统,它作为一种安全装置加装在汽车现有的制动系统上[1]。大多数研究常将滑移率作为控制对象进行连续控制,这时必须解决的问题是:实时辨识路面的附着系数变化情况,自动地改变控制目标,以跟踪路面附着系数的变化。这是因为在不同的路面上,滑移率-附着系数的关系是不一样的,要在各种路面上防止制动抱死情况的发生,就必须进行路面识别,根据路面状况来实时调整控制目标(最佳滑移率)。
ABS为非线性、时变不确定系统,采用常规PID控制往往受到参数整定方法限制,对运行工况的适应性差。因此,采用具有智能特点的模糊逻辑对PID控制器的参数进行整定,可以将模糊控制的高鲁棒性和PID的高精度结合起来,改善系统的性能。
1 车辆模型
汽车制动系统数学模型主要包括汽车动力学模型、轮胎模型和制动器模型。本文主要研究的是防抱死制动系统(ABS)的控制策略,所以在此建立研究分析中常用的单轮模型。
1.1 汽车动力学模型
忽略载荷转移、空气阻力、轮胎滚动阻力和悬架系统、转向系统的影响,并假设模型做纵向直线运动,汽车和车轮的运动方程可以表示为[2]:

式中:m为1/4整车质量,kg;Fx为地面制动力,N;J为车轮转动惯量,kg·m2;R为车轮半径,m;Tb为制动力矩,N·m;μ为地面附着系数;N为地面对车轮的垂直作用力,N;v为车身速度,m/s;ω为车轮角速度,rad/s。
1.2 轮胎模型
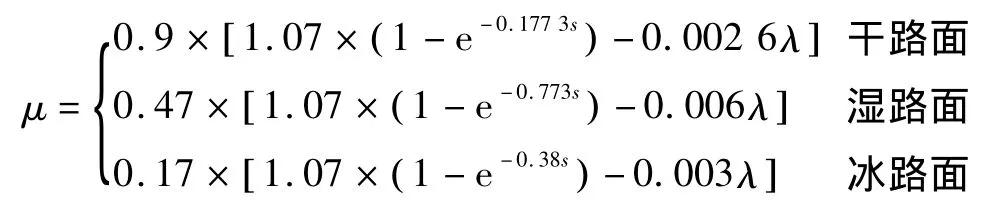
由于模型做纵向直线运动,因此,轮胎模型主要描述纵向地面制动力。轮胎和地面的附着系数随着滑移率的不同而变化,在此采用Timothy提出的轮胎地面 模 型[3],其 中,,为 滑移率。
1.3 制动器模型
制动器模型描述的是轮缸压力与制动力矩之间的函数关系。制动器制动力矩表示为:

式中:k为制动效能因数;p为制动压力。
2 控制系统设计
2.1 系统结构
ABS模糊PID控制系统的原理图如图1所示。当对汽车进行制动时,驾驶员踩下制动踏板给系统一个阶跃输入,即输入一个设定制动压力p。这个设定值与从系统输出端反馈回来的实际控制压力值求和得到的偏差Δp作为系统的控制量。

图1 ABS模糊PID控制器原理图Fig.1 Principle of ABS fuzzy PID controller
制动系统模型由式(4)给出,将Δp输入,可以得到系统的动态制动力矩Tb=kΔp。车辆系统模型由式(1)~式(3)给出,输入Tb可以得到车轮速度ω、车身速度v、滑移率λ以及制动距离s等相关量。将车轮速度和车身速度送入路面识别系统,完成对当前行驶路面的识别,并将该路面条件下的最佳滑移率λ'与由车辆系统得到的实际滑移率λ求和后作为模糊PID控制器的输入,由模糊PID控制算法算出控制压力值并输出。
2.2 模糊PID控制器设计
本文在常规PID控制器的基础上采用的模糊PID,以误差E和误差变化率DE作为输入;采用模糊推理的方法,对PID参数 Kp、Ki和 Kd进行在线自整定,以满足不同E和DE对控制器参数的不同要求,从而使被控对象具有良好的动、静态性能。
2.2.1 选取输入与输出变量
在控制器的设计中,选用误差E=λ-λ'(其中λ为滑移率;λ'为最佳滑移率)和误差变化率DE(误差的导数)作为输入;Kp、Ki、Kd作为模糊推理系统的3个输出[4]。
2.2.2 选取论域和隶属函数
输入变量E、DE的语言变量均为:负大(NB)、负中(NM)、负小(NS)、零(ZE)、正小(PS)、正中(PM)、正大(PB),论域均为{-6,-3,-1,0,1,3,6}。模糊系统的输出变量 Kp、Ki、Kd的语言变量为:大(B)、中(M)、小(S)、零(ZE),论域均为{0,2,4,6}[5],隶属度函数均采用高斯函数。
2.2.3 确定模糊控制规则表
PID控制的规则如下。
①比例系数Kp的数值影响系统的响应速度和精度,Kp越大,系统的响应速度越快,系统的调节精度越高;但Kp过大将产生超调,甚至导致系统不稳定。
②积分系数Ki的数值对系统的稳态精度产生影响,Ki越大,系统静态误差消除得越快;但Ki过大,在响应过程的初期会产生积分饱和现象,从而引起响应过程的较大超调。
③微分系数Kd对系统的动态特性会有影响,因为PID控制器的微分作用环节是响应系统误差变化率DE的,其作用主要是在响应过程中对误差变化进行提前预报,但Kd过大,则会使响应过程提前制动,从而延长调节时间,且系统的抗干扰性能较差[6]。
总结以上基本规则,可以归纳出在防抱死系统中Kp、Ki、Kd的调节规则。
①在ABS刚启动时,E最大。为了加快系统的响应速度,并防止因E的瞬间变大而可能引起的微分溢出,应取较大的Kp、较小的Kd和较大的Ki。
②在制动过程中期,当E和DE为中等大小时,为了减小系统的超调,应取较小的Ki,取适中的Kp、Kd,保证响应速度。
③在制动过程后期,当E很小、DE较大时,为了使系统比较稳定,应取较大的Kp和Ki,适中的Kd。
根据以上规则,可以得到控制规则如表1所示。

表1 隶属函数表Tab.1 Membership functions
2.2.4 解模糊策略
经过模糊决策得到的是模糊输出量,因此,要经过解模糊接口将其转换为精确量。在本系统中解模糊采用重心法[7]。对Kp、Ki和Kd这3个输出分别求重心,取模糊隶属函数曲线与横坐标围成面积的重心作为代表点。比例系数Kp的表达式为:

式中:ZpN(N=1,2,3,…)为 Kp的语言变量的论域元素;μKpN
为Kp的隶属度。同理可以对积分系数Ki和微分系数Kd进行解模糊。
2.3 路面识别系统
所谓的最佳滑移率,就是汽车在特定路面上制动时能得到最大纵向制动力,同时能获得较大横向制动力时的滑移率。如果在汽车制动时,使滑移率一直处于最佳滑移率附近,可以最大限度地保持车辆的操纵稳定性,减小制动距离。由轮胎地面模型表达式可以看出,车轮在不同路面下产生的滑移率差别较大,因而对于在多种复杂路面条件下工作的汽车ABS来说,除了具有鲁棒性强的控制算法之外还必须具备路面识别能力。本文设计的汽车ABS路面识别系统原理如图2所示。将由实际滑移率计算得到的在不同路面上产生的附着系数与由μ=Fs/M(Fs为纵向制动力,M为汽车整车质量)得到的附着系数进行比较,差值最小的附着系数所对应的路面就是算法识别出的路面。着系数、车速和轮速以及制动力矩的曲线如图3所示。
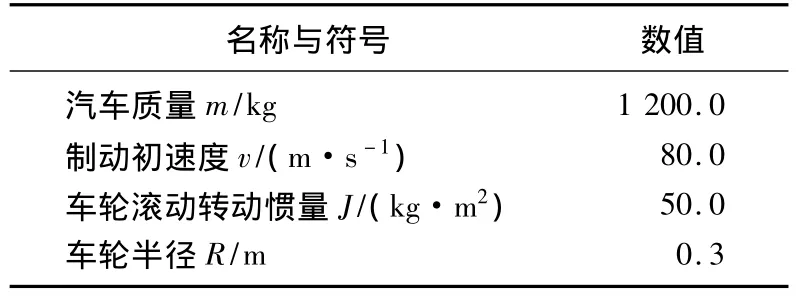
表2 模型参数Tab.2 Model parameters

图3 混合路面下的仿真结果Fig.3 Simulation result on the road surface with mixing adhesion coefficients

图2 路面识别系统结构Fig.2 Structure of road surface recognition system
3 仿真分析
假设制动开始时车辆运行在冰路面上(路面条件:最佳滑移率为0.08,附着系数为0.2),1.5 s后转为干沥青路面(路面条件:最佳滑移率为0.2,附着系数为0.8),此时需要路面识别系统及时跟踪路面条件的变化,同时需要模糊PID算法将滑移率稳定在对应最佳滑移率上。使用Simulink对系统进行仿真,汽车模型参数如表2所示,仿真时间为3 s,得到滑移率、附
由图3可以看出,当开始制动时,路面识别系统通过比较3种假设路面下的附着系数与实际附着系数的差值大小,判断出路面类型为冰路面,所以设定目标滑移率为0.08,相应地调节模糊PID控制器参数,通过增减制动力矩使滑移率曲线维持在0.08附近,此时的制动力矩曲线维持在400 N·m左右。在1.5 s时路面变成干路面,滑移率突然变大,识别系统迅速判断出路面情况的变化,将干路面的最佳滑移率0.2设定为目标滑移率,同时调节参数将滑移率曲线迅速控制在0.2附近,此时的制动力矩为1 500 N·m左右。可见,本文中提出的ABS模糊PID控制系统的路面识别子系统能够准确地判断出路面的变化,并依靠模糊PID控制算法快速反应输出相应的控制值。
4 结束语
本文介绍了防抱死制动(ABS)模糊PID控制系统的设计过程,并通过仿真案例验证了系统的有效性。本文中设计的ABS系统,不需要增加任何辅助设备,只需借助汽车自身的传感器得到的数据就可以识别出当前行驶路面,继而将该路面的最佳滑移率作为控制目标,使得ABS能够实时跟踪路面条件的变化并做出相应的控制动作,提高了系统的实时性。在控制算法方面,本文采用了模糊PID,由于其结合了模糊鲁棒性好和传统PID控制精度高的优点,控制效果较好。仿真结果显示,本文中的设计具有一定的实用价值。
[1]ABS株式会社.汽车制动防抱装置(ABS)构造与原理[M].李朝禄,译.北京:机械工业出版社,1995.
[2]程军.汽车防抱死制动系统的理论与实践[M].北京:北京理工大学出版社,1999:109-128.
[3] Timothy W A,Panos Y.Multicriteria optimization of anti-lock breaking system control algorithms[M].New York:the Gordon and Brach Publishing Group,1996.
[4]李林,李仲兴,陈昆山.汽车ABS模糊控制方法的分析与仿真[J].江苏大学学报:自然科学版,2003,24(3):49-52.
[5]郭孔辉,王会义.模糊控制方法在汽车防抱制动系统中的应用[J].汽车技术,2000(3):7-10.
[6]晏蔚光,李果,余达太,等.基于模糊PID控制的汽车防抱制动系统控制算法研究[J].公路交通科技,2004,21(7):123-126.
[7]吴晓莉,林哲辉.MATLAB辅助模糊系统设计[M].西安:西安电子科技大学出版社,2002.
Simulation Research on Fuzzy Parameter Self-tuning PID Control Method for Automobile ABS
Anti-lock breaking system(ABS)is one of the vital components of automobile security system.It is of great significance to recognize road conditions in real time accurately and automatically,and to increase the robustness of ABS control algorithm.Through simulation analysis,an easy and effective road recognition algorithm is proposed,and the fuzzy PID controller with optimal slip ratio as the control goal is designed.Combining with the vehicle model,the simulation is conducted on the road with varying adhesion coefficient.The results show that the system recognizes the change of the road conditions promptly and adjust the control parameters automatically to make the vehicle get maximum surface brake force.
Anti-lock breaking system(ABS)Slip ratio Road surface recognition Fuzzy PID controlSimulation
λ=(v¯-¯ωR)/v¯×100%
TP273
A
修改稿收到日期:2011-11-22。
张凤(1984-),女,2008年毕业于兰州交通大学模式识别与智能系统专业,获硕士学位;主要从事智能控制、远程控制方面的研究。
猜你喜欢
中国特种设备安全(2022年2期)2022-07-08
数学大王·低年级(2021年2期)2021-02-21
小读者(2019年24期)2020-01-19
汽车观察(2019年2期)2019-03-15
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年1期)2017-11-24
山东青年(2016年12期)2017-03-02
发明与创新·中学生(2016年7期)2016-05-14
航天制造技术(2016年6期)2016-05-09
探测与控制学报(2015年4期)2015-12-15