飞翼布局无人机舵面分配算法研究
2012-03-03 06:15楼静梅张科
飞行力学 2012年5期
楼静梅,张科
(西北工业大学航天学院,陕西西安 710072)
引言
飞翼布局无人机由于其自身的综合优势而受到了无人机设计师们的普遍重视。与正常布局无人机相比,飞翼布局无人机有很多优势:整体上采用翼身融合,有效地提高了无人机的飞行升力,减少了机翼与机身的干扰阻力,同时也大幅度地缩减了雷达散射截面RCS,提高了隐身性能。但也存在先天的缺点:升降舵操纵力臂较常规布局无人机短,因而操纵效能大大降低[1];没有水平安定面,因而纵向稳定性下降,甚至静不稳定;没有垂尾和方向舵,其侧向自然稳定性也下降了。
多组升降副翼和一组开裂式方向舵的组合成为大展弦比飞翼布局飞机的典型操纵面配置方案,在B-2轰炸机和BWB飞机中得到了应用[2]。
与常规无人机不同,飞翼布局无人机有其特殊的操纵特性,对飞行控制系统提出了更高的要求。其操纵面不仅要提供足够的控制效率,还要保证无人机的稳定性。
本文针对飞翼布局无人机出现一定程度的舵面破损故障情况进行研究。在不改变现有控制算法的基础上,通过采用舵面权限动态分配算法使其操纵力矩特性基本不变,从而不影响无人机执行空中任务。
1 无人机舵面操纵特性数学描述
以飞翼式无人机ICE101等效模型为对象,开展舵面控制分配算法研究。无人机舵面配置示意图如图 1 所示[3]。
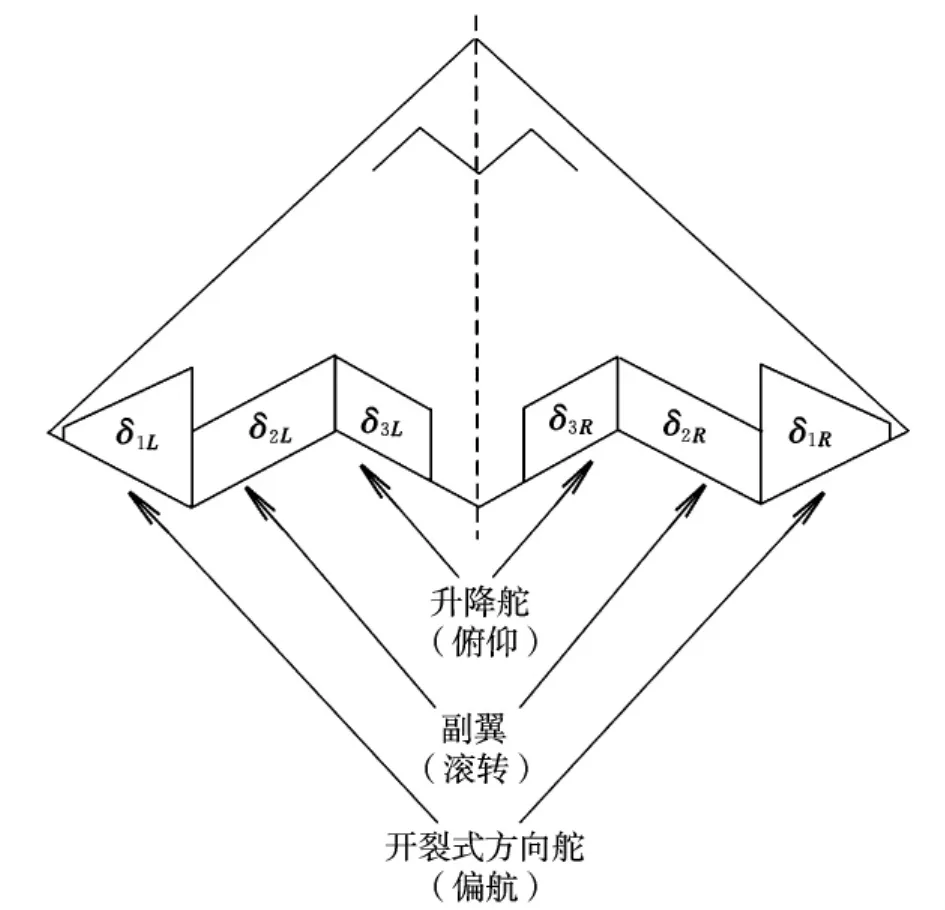
图1 无人机舵面配置示意图
图1为一种典型的舵面分配方法,从翼尖到翼根分别为开裂式方向舵、副翼、升降舵,共计3对6个舵面。根据文献[3],开裂式方向舵可用舵偏角范围为-60°~+60°,副翼可用舵偏角范围为-45°~ +45°,升降舵可用舵偏角范围为 -30°~ +30°。定义除方向舵以外所有的舵偏角均向下为正;开裂式方向舵同一时刻只有一个舵面有偏转,定义左侧方向舵开裂为正,右侧方向舵开裂为负。对应的舵面分配算法如下:

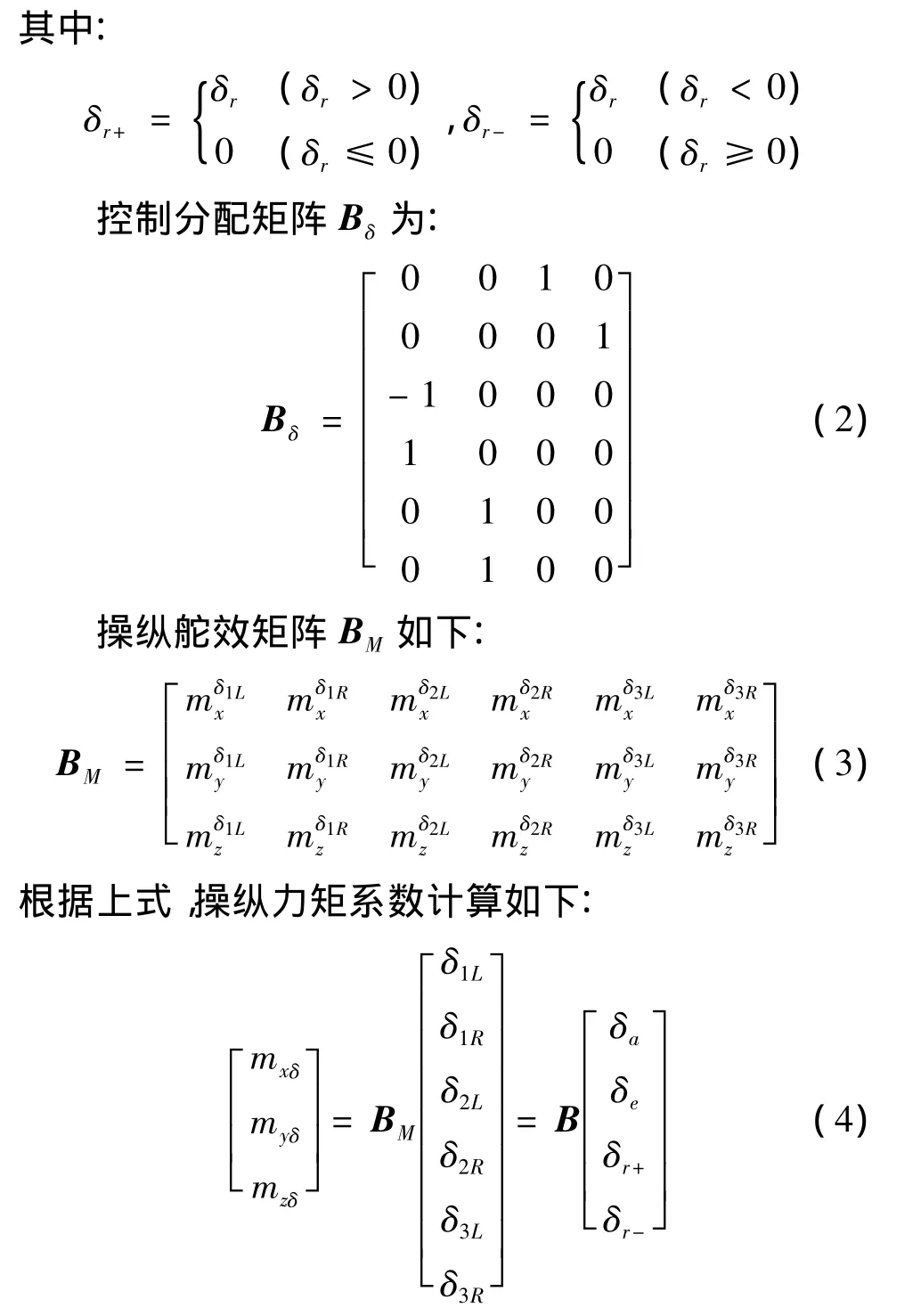
式中,B=BMBδ。
下面通过引入破损故障特征参数和力矩线性假设来描述舵面破损故障。
定义1:对任何一个舵面,定义破损故障特征参数fδ为舵面破损部分面积与无破损时舵面面积的比值。
假设1:假定舵面破损程度与舵面的操纵力矩呈线性比例关系,即舵面破损后的操纵力矩系数计算如下:

2 舵面分配算法设计
舵面分配是一种工程上常用的方法,引入的目的是兼顾简化控制系统设计和适应不同操纵面配置方案这两个要求。具体来说,通常基于俯仰、偏航、滚转3个等效操纵量来开展控制系统设计,本文等效操纵量为式(4)给出的升降舵 δe、方向舵 δr+和δr-、副翼δa,然后根据不同操纵面配置特点以操纵力矩等价为原则进行舵面分配算法设计,这样就可以将控制系统设计和具体的操纵实现隔离开,大大简化了设计。例如,上文给出的典型分配算法。但是典型舵面分配算法要么固定不变,不能适应舵面故障情况,要么过于复杂,计算量大,因此减小计算量是主要问题。基于这一目的,提出了一种新的舵面分配算法,即动态舵面权限分配方法,其设计步骤如下:
(1)根据对象的操纵特点,在满足偏航操纵要求的前提下,选择尽量少的舵面作为方向舵面,并要尽量减小偏航通道对俯仰和滚转通道的操纵耦合;
(2)其余舵面全部作为升降副翼,即每一片舵面同时担负滚转操纵和俯仰操纵的任务,并且首先计算每片舵面的副翼舵偏角,原则是根据每片舵的最大可用舵偏角按比例分配每片舵的副翼舵偏角;
(3)根据消除副翼舵偏和升降舵舵偏之间的操纵耦合及产生俯仰操纵指令的需求,计算出每片舵面的升降舵偏角,同一侧的升降舵偏角分配依旧根据每片舵的最大可用舵偏角按比例分配;
(4)根据消除升降副翼产生的偏航操纵耦合和偏航操纵指令的需求,计算出所需方向舵的舵偏角。
根据以上设计思路,下面以飞翼式无人机ICE101等效模型为例,完成具体舵面控制分配算法设计。
①根据设计步骤(1),当开裂式舵面无故障时,确定开裂式舵面δ1L和δ1R为方向舵;
②根据设计步骤(2),δ2L,δ2R,δ3L,δ3R作为升降副翼,首先计算每片舵面的副翼舵偏角,副翼舵偏角根据如下两个公式计算:
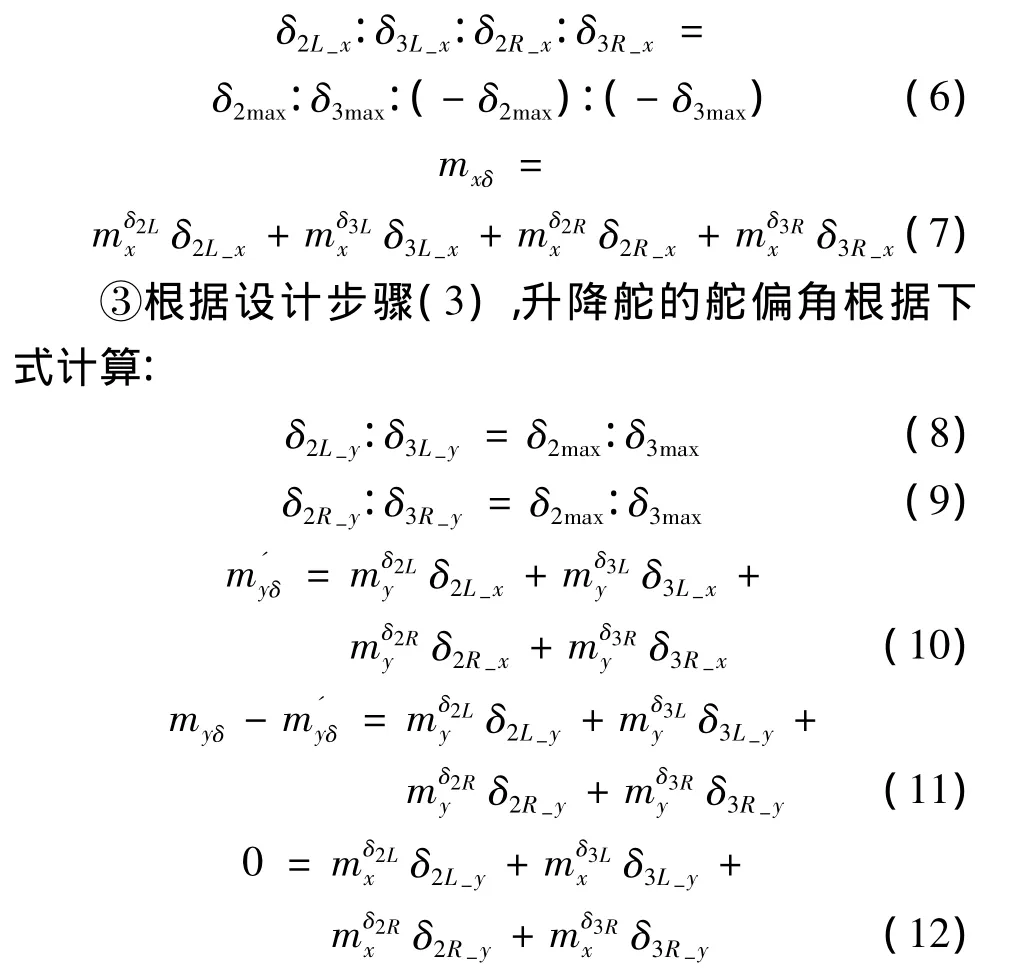
根据式(8)~式(12),可计算出每片舵面的俯仰舵偏角,这样就可以按如下公式求出升降副翼每片舵面的舵偏角:
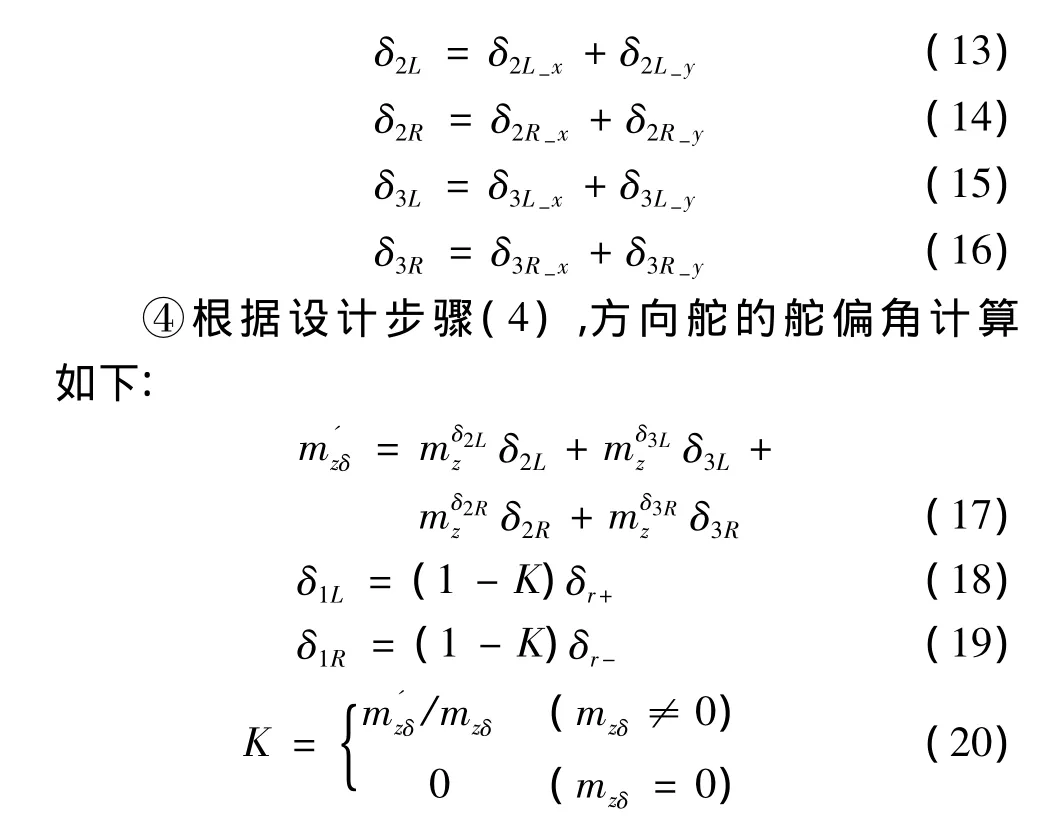
至此,已算出所有舵面的舵偏角指令,完成了舵面分配算法设计。
3 舵面分配算法性能分析
下面通过实例对比分析图1所示的典型舵面分配算法和本文提出的动态舵面分配算法,来评估设计的舵面分配算法的性能。
3.1 无故障时舵面分配算法性能分析
首先给出无舵面故障时,某典型状态下无人机的操纵舵效矩阵BM(量纲为1/(°))如下:

对本文设计的舵面分配算法,俯仰和滚转操纵力矩是由图1所示的升降舵和副翼共同实现的,因此可实现俯仰和滚转操纵力矩权限的动态分配。根据舵面分配算法的设计步骤,只需俯仰和滚转操纵力矩系数满足如下约束:

则滚转和俯仰操纵力矩系数最大取值范围如下:mxδ∈[- 7.8 7.8]myδ∈[- 7.3 7.3]
对偏航操纵力矩系数来说,根据设计步骤可知,无故障时,与典型舵面分配算法相同。
mzδ∈[- 0.3 0.3]
上面分析表明,当滚转和俯仰操纵力矩系数满足约束式(21)时,滚转和俯仰操纵力矩可达范围要大于典型舵面分配算法,这有利于克服俯仰或滚转通道产生的较大扰动。
3.2 舵面破损时舵面分配算法性能分析
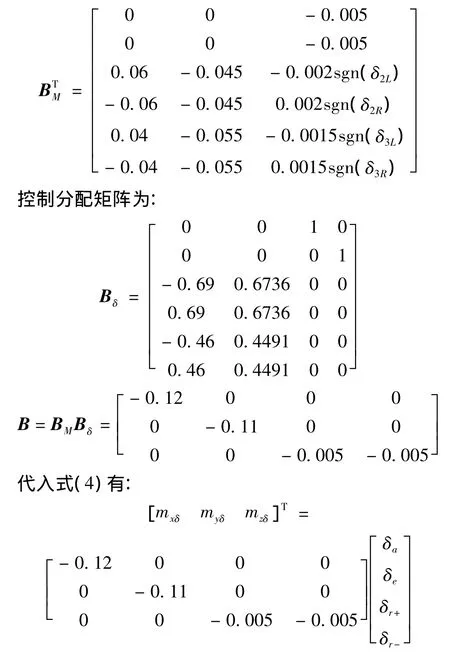
以图1中的副翼两侧完全破损故障为例,此时,根据定义1和假设1,操纵舵效矩阵B'M(量纲为1/(°))如下:

根据图1所示的典型舵面分配算法,滚转、俯仰和偏航操纵力矩系数可达范围表示如下:
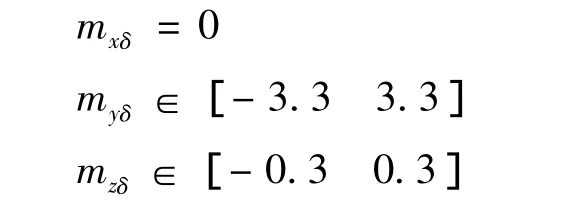
这是因为典型舵面分配算法把滚转操纵力矩全部分配到副翼上,因此当副翼操纵完全失效时,俯仰操纵力矩和偏航操纵力矩不受影响。
对本文设计的舵面分配算法,根据设计步骤可得到俯仰和滚转操纵力矩系数约束式如下:

操纵力矩系数可达范围表示如下:
从上述结果可看出,当副翼完全破损时,本文设计的舵面分配算法特点是滚转和俯仰操纵力矩都有所损失,但滚转操纵并没有完全失效,其中俯仰操纵力矩的损失可由俯仰和滚转操纵力矩约束关系可达范围变小看出。这是因为设计的舵面分配算法把滚转操纵力矩分配到图1所示的副翼和升降舵上了,因此还保留了一部分滚转操纵能力,当然,由于俯仰操纵力矩也有一部分分配到了副翼上,因此也有所损失。
4 结论
针对舵面无故障和副翼两侧完全破损故障情况,通过对舵面分配算法的性能分析,得到如下主要结论:
(1)与典型舵面分配算法相比,设计的舵面分配算法实现了俯仰和滚转通道操纵权限的动态分配,有利于克服较大的俯仰或滚转通道干扰;
(2)由于设计的舵面分配算法采用了除方向舵外每一片舵面都同时担负滚转操纵和俯仰操纵任务的原则,因此相比典型舵面分配算法来说,对升降舵或副翼出现破损故障有更强的容错能力;
(3)当然,也由于同样的原因,对设计的舵面分配算法来说,升降舵或副翼的破损故障会同时影响俯仰和滚转操纵力矩特性,而典型舵面分配算法则不会;
(4)在δ2或δ3发生破损故障时,设计的分配算法由于采用了升降副翼,因此会产生通道间的耦合影响,本文中没有考虑对这种耦合的解耦算法,在实际设计中,可基于耦合模型精确已知的解耦算法或耦合模型未知或不精确已知的鲁棒控制方法来进行解耦设计。
综上所述,设计的舵面分配算法对升降舵和副翼破损故障有着较强的容错能力,对提高无人机控制系统的容错能力有一定的参考价值。
[1] Colgren R,Loschke R.Totail or two tails—the effective design and modeling of yaw control devices[R].AIAA-2002-4609,2002.
[2] Steeener M,Voss R.Aeroelastics flight mechanics and handling qualities of the mod BWB configuration[R].AIAA-2002-5449,2002.
[3] Barfield A Finley,Hinchman Jacob L.An equivalentmodel for UAV automated aerial refueling research[R].AIAA-2005-6005,2005.
猜你喜欢
装备环境工程(2022年7期)2022-08-10
智能制造(2021年4期)2021-11-04
西安航空学院学报(2021年3期)2021-10-14
民用飞机设计与研究(2021年1期)2021-04-06
机械设计与制造工程(2020年8期)2020-09-03
民用飞机设计与研究(2020年1期)2020-05-21
智富时代(2018年11期)2018-01-15
智富时代(2018年11期)2018-01-15
北京航空航天大学学报(2017年9期)2017-12-18
北京航空航天大学学报(2017年3期)2017-11-23