
基于摄像机位置的大规模粒子云绘制加速算法
2012-03-19 02:02葛奇鹏
湖北理工学院学报 2012年3期
葛奇鹏
(武汉717 研究所,湖北武汉430000)
0 引言
无论在娱乐、教学、军事还是辅助设计领域,只要涉及天空仿真,便不可避免的要遇到云团绘制问题,粒子系统很好的解决了这类不规则模糊物体的仿真问题,但是由于粒子系统本身具有大量冗余三角网格,即使在这个显卡处理能力日新月异的年代,粒子系统的效率依然是个巨大的难题[1]。
前人在粒子系统的加速及优化上做过很多工作,被广泛使用的技术有BSP 树技术、shader 技术等,但是这些技术都无法解决数据冗余问题,计算机依然在绘制大量对视觉效果无增益的粒子,实时绘制大规模云团依然是一大难题[2]。
众所周知,人在观察时,对远处物体的精细度要求低于近处物体。如果能够基于摄像机对远处物体进行细节降阶处理,不仅于显示效果损伤较小,还能够大大降低需要绘制的粒子数量,从而达到提高绘制速度的目的。本文将就这个问题进行一些探讨,并提出了一个可行的解决方案,达到了提高绘制速度的目的。
1 粒子云计算与绘制
为了解决火焰、水波、云彩等不规则模糊物体的模拟问题,Reeves 于1983年提出了粒子系统。粒子系统是由大量粒子结合在一起来表现模糊物体的系统,其基本原理为:将模糊物体看作由大量不规则的、运动的、随机分布的粒子组成的粒子集。不同的粒子虽然属性、形状、物理化学性质、运动轨迹不同,但是他们都具有通用的属性,在计算机里可以很方便的将其定义为粒子类,包含自身的外形、空间位置、纹理等等信息,他们不断运动,不断改变形态,合力表现景物的外部特征[3]。
三维云团的模拟一般基于粒子系统。基本思想是认为一个粒子为一个球形物体,粒子密度服从高斯分布。一个粒子的属性包括:中心位置、半径、密度、颜色等[4],通过分型算法可随机生成各式各样的云粒子点集,一般存储在一个.mesh 文件中供调用。
本文例子中的云粒子类如下所示:
class SkyCloudParticle
{
…/ /省略了方法
protected:
float _rRadius;
float _rTransparency;
Vec3f _vecPosition;
Vec4f _vecBaseColor;
std::vector<Vec4f > _vecLitColors;
Vec3f _vecEye;
};
由于粒子系统极为庞大,成千上万的粒子往往不可避免,虽然计算的时候会将粒子模型化、具体化,但是真正绘制的时候,往往用贴附粒子纹理的公告板代替。所谓公告板,就是一个始终朝向摄像机的有纹理的正方形面,相比于至少6个面的球体[5],公告板对视觉效果的影响很低,但是性能极大地改善。本文采用最简易的公告板进行粒子的绘制,效果如图1所示。
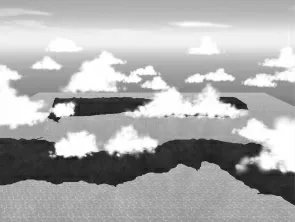
图1 使用公告板粒子渲染的大规模云团
本文例子由OpenGL 实现,另绘制了山峦、天空盒、海水等其他物体以增强可视效果。
2 基于摄像机的分层加速
粒子系统的特点是粒子繁多,但是每个粒子的结构都相对简单,可削减性强,对于较远的云团,减少一定数量的粒子是可以接受的。如果2 个粒子之间距离为L 时人眼可以感觉出差异,当距离缩减为L/2 以下时,便可用一个粒子表示这2 个粒子,我们认为云团整体变成1/2 大小时,云团的粒子数降低一半是不影响视觉效果的。
由此可推出公式:

M 为减少粒子的倍率;D 为粒子距离摄像头的距离;∂,β 皆为与视景体相关的参数;F为相关函数。
基于摄像机的场景分层如图2所示。在图2 的视景体下,可以将裁减后的场景分为3个部分,红色部分云团使用全体粒子进行绘制,蓝色部分使用1/2 粒子进行绘制,灰色部分使用1/4 粒子进行绘制。
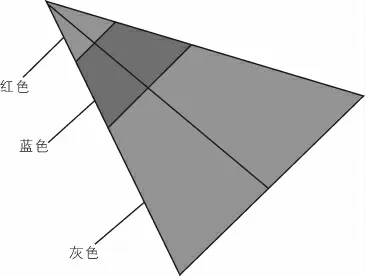
图2 基于摄像机的场景分层
这种不规则分层方式消除了相当数量粒子,而由于人眼的观察特性,这些粒子的缺失是不影响视觉效果的,在加速的同时无画面质量的降低。
3 基于BSP 树的算法实现及优化
一种经典的云团绘制算法是利用BSP 树以AABB 包围盒为基础将云团进行排序[6]。BSP 树可以有效的加速遍历,当某一个分枝被检测到不与视景体相交,则其下的所有子树都无需继续遍历,用这种方法判断哪些云团需要绘制,哪些不需要,这样可以节约大量计算时间,不仅如此,在本文的算法中,涉及到了云团与3 部分视景体的碰撞检测,同样要使用到BSP 树进行加速。
3.1 使用BSP 树对粒子绘制进行加速
首先用AABB 包围盒将云团分割成以云团为最小单位的BSP 树,然后根据视景体进行判断,如图3所示。
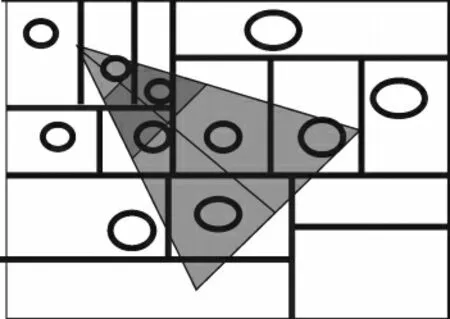
图3 基于AABB 包围盒的云团BSP 组织
判断哪些云团需要被绘制的方法如下:
1)以一个AABB 包围盒包围视景体,遍历BSP 树进行碰撞检测,裁减掉不相交的BSP 分枝[7]。
2)用视景体遍历剩下的BSP 树作碰撞检测,裁减掉不相交BSP 分枝,最后得到需要绘制的云团列表[8]。
3.2 使用BSP 树进行分层判断加速
判断云团阶层的方式跟判断哪些云团需要被绘制的方法类似,设置3 个列表,分别存放一阶、二阶、三阶云团的代号。从一阶视景体开始,将其用AABB 包围盒包裹,与已确定要显示的云团BSP 树进行碰撞检测,得到结果之后,再用实际视景体进行碰撞检测,得到一阶云团,将这些云团放入一阶云团列表,并从云团显示总表中移出。用同样的方式将剩下的显示总表与二阶、三阶视景体继续进行碰撞检测。最后依次以绘制100% 数量粒子、50%数量粒子、25% 数量粒子的方式对一阶、二阶、三阶云团表进行计算以及渲染。
4 本算法的加速效能计算
以本文程序为例,视景体投影为一个顶角为45°的等腰三角形。当云团足够多时认为一阶、二阶、三阶中绘制的云团与视景体面积成正比,则最终绘制的粒子数与未使用算法之前的比为:

可见减少的粒子数跟三阶的分割比例有很大关系。当一阶越大,显示效果越好,但绘制所需时间越多;反之当三阶越大,绘制速度极大提高,但绘制越粗糙。只要确保L1小于视景体长度的1/3,这种算法就能将绘制速度提高2 倍以上。
在本例中,多次试验得到结果为:不使用加速算法的场景绘制漫游平均帧数为27 帧,而使用之后可以提高到49 帧。
5 结束语
云团的绘制是场景仿真中不可缺少的部分,从以往的经验可得,云团的绘制由于其固有属性,占据了天空绘制60%以上的资源[9],提高云团绘制速度即可提高天空场景的仿真速度。
本文的分阶思想简单明了,实践证明提高了绘制速度,但是尚有可继续挖掘的地方。本文只进行了三阶分阶,如采用更加精细的分割,对视觉效果的影响可能会更低,剔除的无需绘制的粒子可能更多,但是计算量可能会增加,编程复杂度也可能会相应增加,需要大量的研究和试验,但却不失为一个可以研究和探寻的方向[10]。
[1]陈华杰,余小清,唐经洲,等.基于粒子系统与LOD 技术的实时雨雪效果模拟[J].计算机仿真,2008(4):194-197
[2]丁纪云,陈利平,李思昆.基于OpenGL 的烟花动态模拟方法的研究与实现[J].计算机工程,2002,28(4):240-241
[3]王功明,郭新宇,赵春江,等.粒子系统的优化技术研究[J].计算机应用研究,2008,25(2):495-497
[4]龚琳,顾大权,范茵,等.三维云场景的模拟[J].解放军理工大学学报(自然科学版),2006,7(5):496-500
[5]郭佳佳.基于粒子系统的自然景物模拟研究[J].电脑知识与技术,2009(4):1006-1008
[6]马登武,叶文.虚拟现实技术及其在飞行仿真中的应用[M].北京:清华大学出版社,2005:76-176
[7]胡英芳,黄强强,江顺亮.基于OpenGL 的离散粒子系统显示方法及其改进[J].计算机与现代化,2011(2):53-57
[8]汪继文,陆和军,张妍妍.基于粒子系统的水滴溅落模拟[J].科学技术与工程,2010(6):1547-1550
[9]Andersen S,Andersen L.Analysis of spatial interpolation inthe material-point method[J].Computers and Structures,2010 (6):506-518
[10]Fang Jiannong,Parriaux Aurele,Rentschler Martin,et al.Improved SPH methods for simulating free surface flows ofviscous fluids[J].Applied Numerical Mathematics,2009(3):251-271
猜你喜欢
少先队活动(2021年3期)2021-12-04
齐齐哈尔大学学报(自然科学版)(2021年3期)2021-04-19
海洋信息技术与应用(2020年4期)2021-01-18
物理学报(2017年11期)2017-08-09
郑州大学学报(理学版)(2017年3期)2017-08-07
润·文摘(2016年4期)2016-07-13
舰船科学技术(2015年8期)2015-02-27
振动、测试与诊断(2014年4期)2014-03-01
装备制造技术(2012年8期)2012-02-20
图学学报(2011年6期)2011-07-07
